0 to 5V output Analog Hall Sensor for Foot Controller
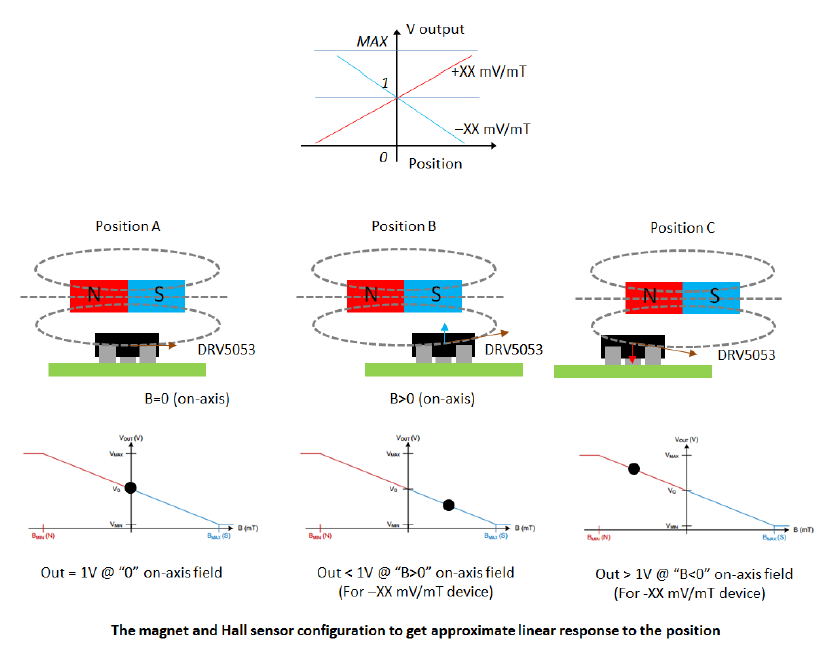
This project includes an analog Hall Effect sensor and an Op-Amp circuit which can be used as position or angular sensing with the benefits of no contact and wearing, high stability and wide sensing range. Two configurations of the magnet and Hall sensors are analyzed.
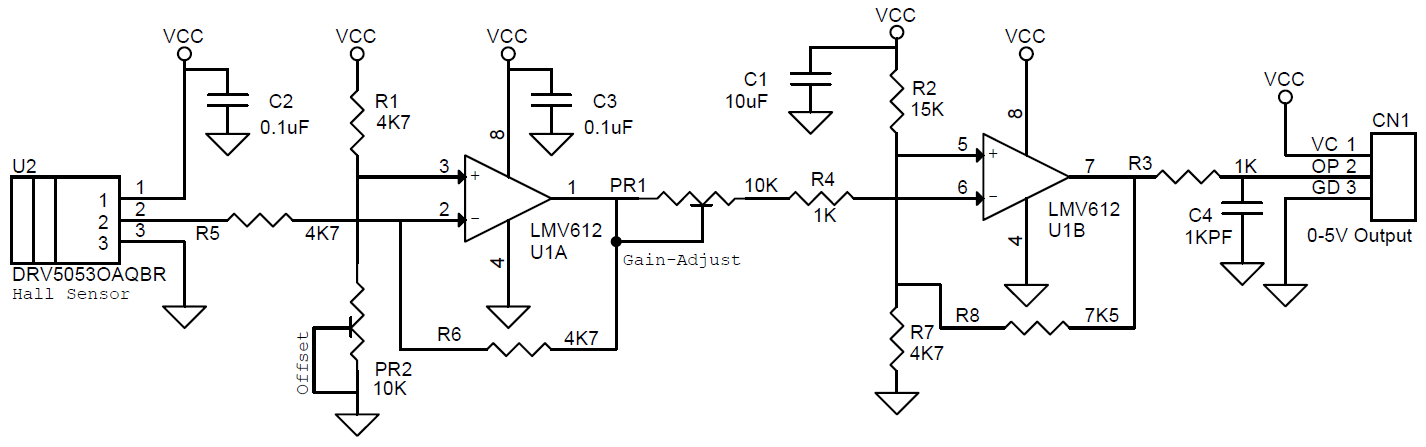
This project includes an analog Hall Effect sensor and an Op-Amp circuit which can be used as position or angular sensing with the benefits of no contact and wearing, high stability and wide sensing range. Two configurations of the magnet and Hall sensors are analyzed. Trimmer Potentiometer PR2 provided to adjust the offset and PR1 helps to set the system gain. The Op-Amp circuit helps to achieve the desired output bias and range. The sensor provides an approximately linear response, adapt wide magnet types and field range. DRV5053 Sensor is the heart of the project. The DRV5053 device is a chopper-stabilized Hall IC that offers a magnetic sensing solution with superior sensitivity stability over temperature and integrated protection features. The project is useful for applications like Foot Controller, Industrial control stick, Industrial foot pedal, general position or angular sensing.
The output of DRV5053 is about 0.2V to 1.8V with the quiescent 1V at zero fields or no perpendicular flux to the sensing surface. In the non-linear configuration, the output range is limited either from 0.2V to 1V or from 1V to 1.8V. An Op-Amp stage is introduced in this design. It deals with the raw Hall sensor output signal with adjustable offset and scaling range. LMV612 op-amp used for signal conditioning. Actually, any fixed position along the full stroke of the magnet can be set as an offset point mechanically. When the relative position of the magnet and the Hall sensor is fixed at the designed offset point, the final output voltage can be adjustment by PR2. U1B is used as the amplitude amplifier stage with adjustable gain tuning by PR1. Also, there is an RC filter at the final output with R3 and C4. The actuator is fixed at a mid-point between the two ends of the stroke by a dual-spring system. Controlling by the foot, the actuator can go two sides of the stroke direction. The application requires the output to stay at about 1.1V when the actuator is at a balanced point (fixed offset point). When the foot strokes downside, the output goes from 1.1V down to ~0V. When the foot strokes upside, the output goes from 1.1V up to ~5V.
Features
- Supply 5V DC
- Approximate linear response
- Adapt to wide magnet types and field range
- 0 to 5V full scale output ability
- Adjustable quiescent offset and gain
- Low power RRIO amplifier stage
- Cost-effective
- PCB Dimensions 32.09mm X 12.70MM
Tuning Guide
- Tuning PR2 for the designed fixed offset output
- Place the magnet to its MIN MAX stroke and tuning PR1 to get designed output range
- Release or return the fixed offset point, back to step 1 readjustment the offset point
- Back to step 2 to readjustment the offset output
- Repeat 1 to 4 steps to get both the designed offset the scaled output range.
- Note that the adjustment range of offset and scaling is also related to the mechanical magnet Configuration and the magnetic field. Do possible adjustment of the mechanical configuration if needed.
- The OpAmp parameters are also adjustable for special sensing range and output coverage. It is recommended to change R1 for extend offset adjustment ability and R8 for extend the gain range.
Schematic
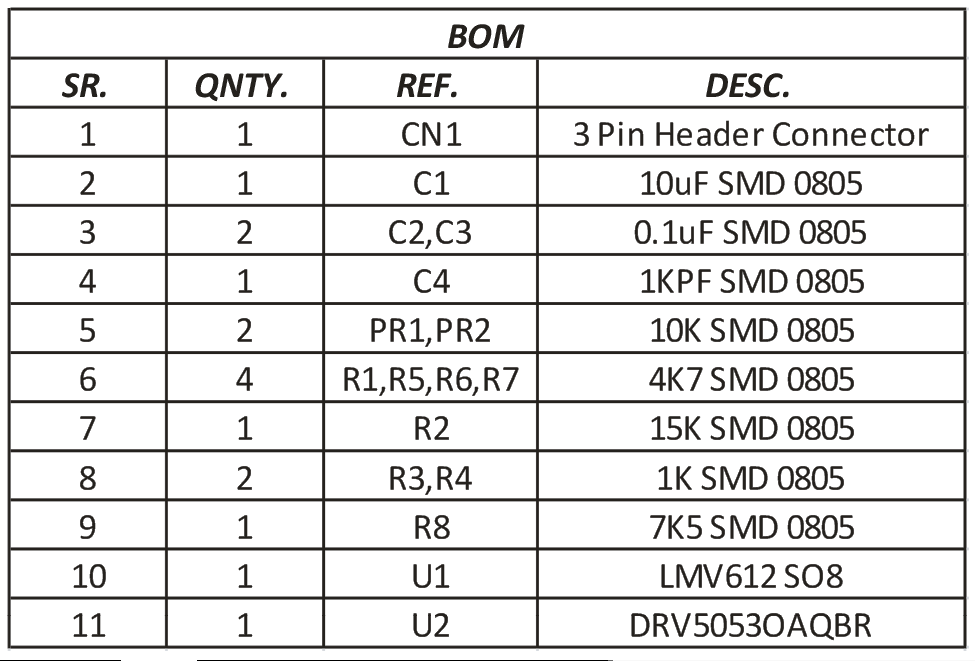
Parts List
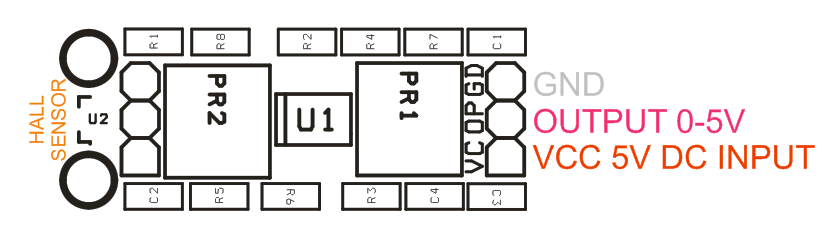
Connections
Mechanical Drawing
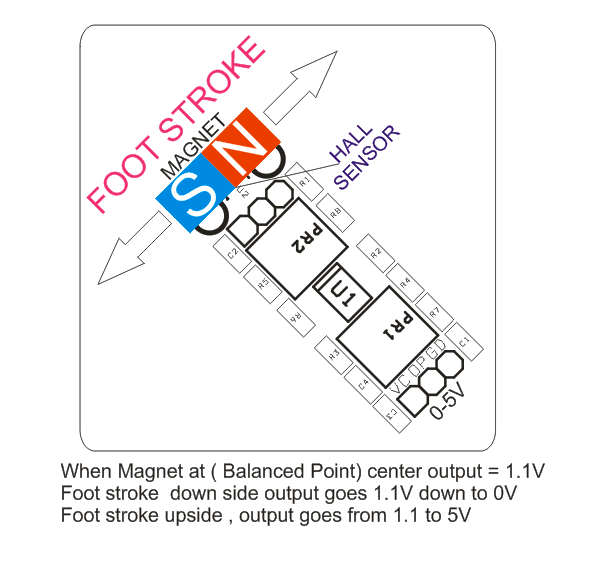
Magnet Position vs Output
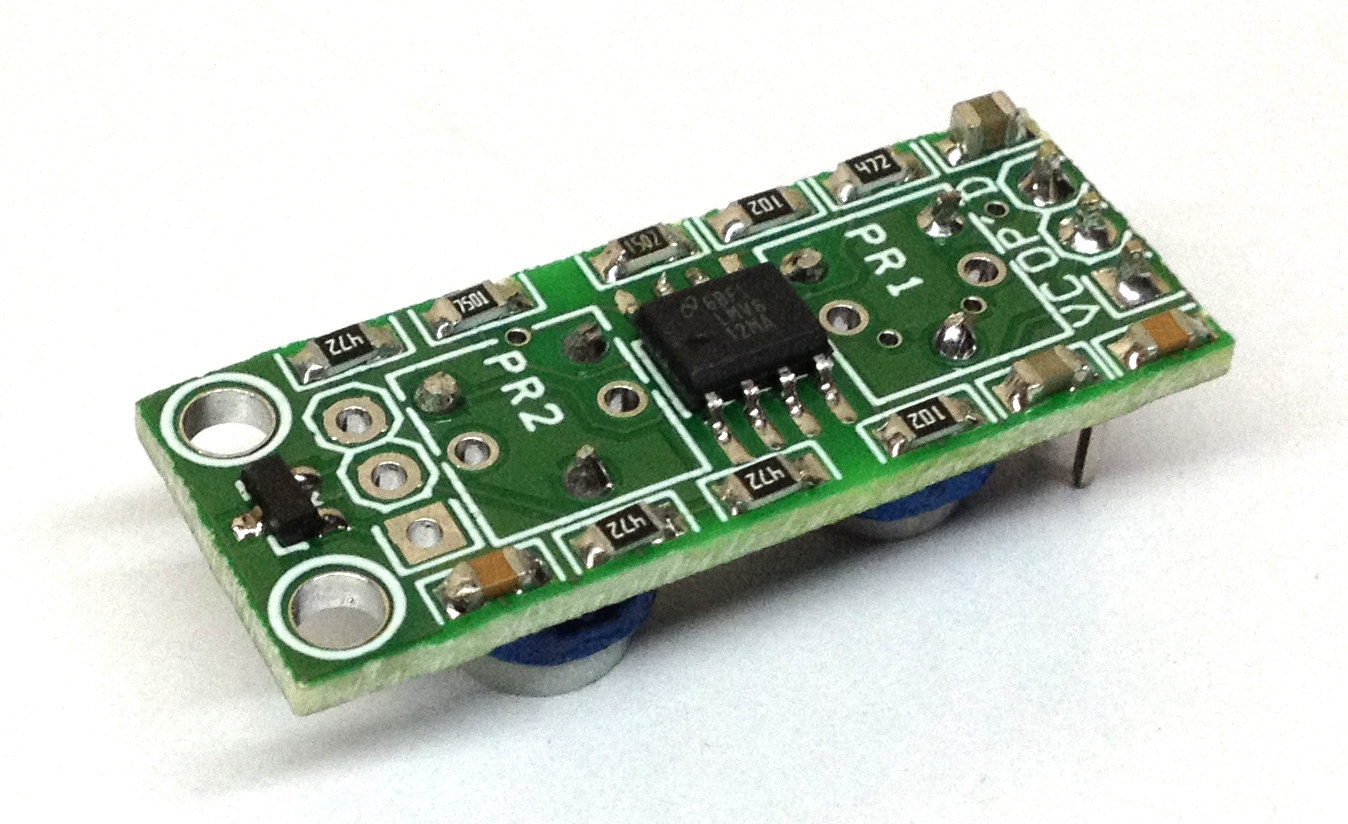
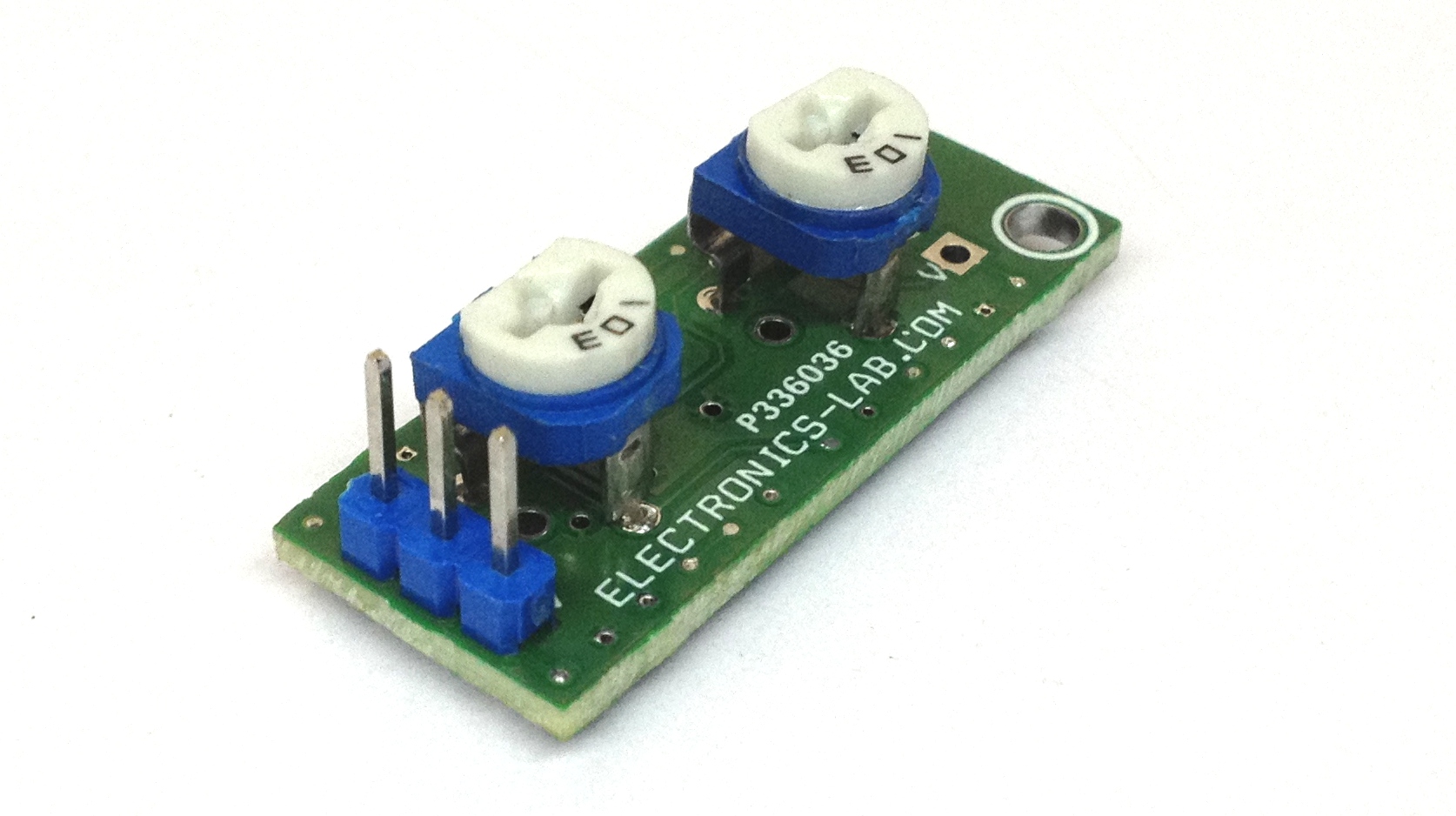
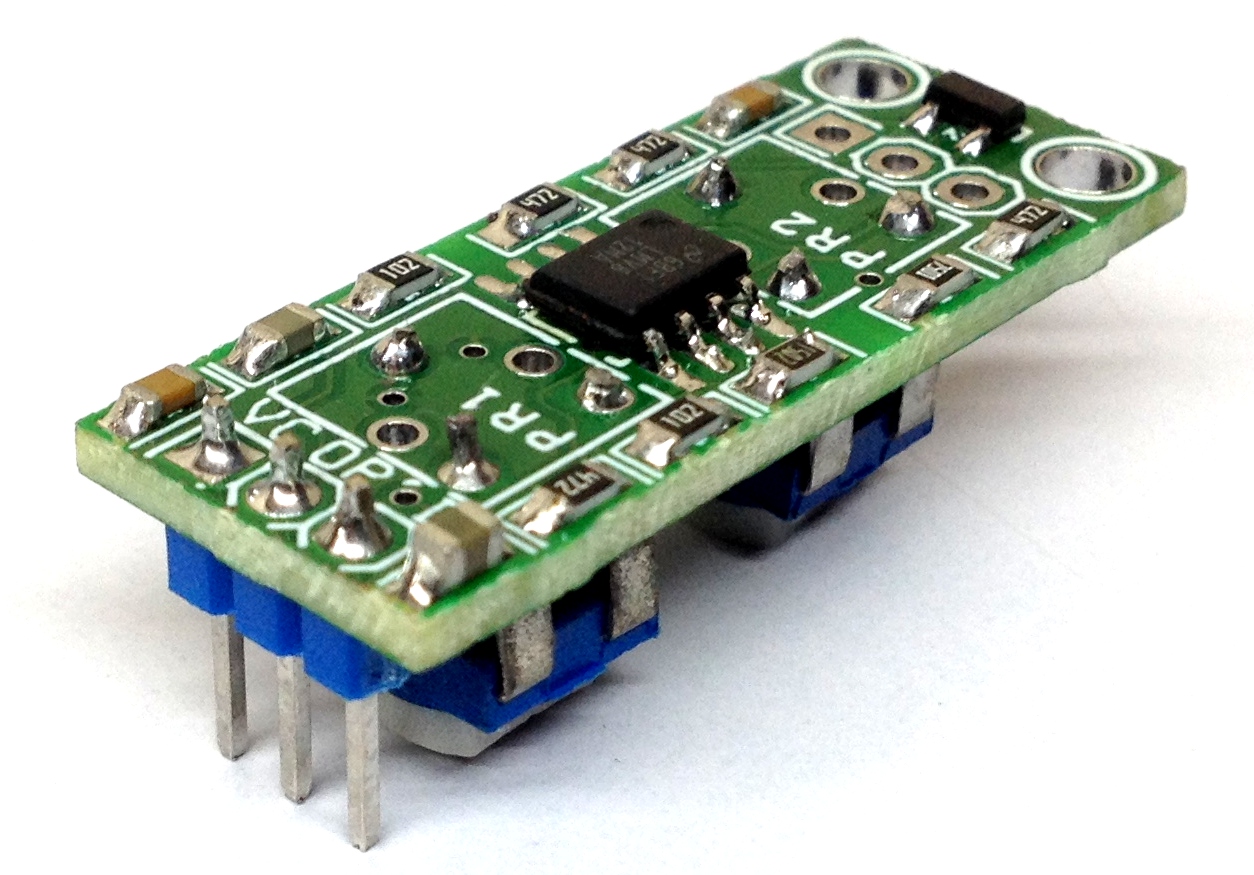
Photos
Does anybody make these? I am a man in need in the uk.
check your email please
Same question here. 🙂
Please email me here: https://www.electronics-lab.com/contact-us/ for a quote. Thanks
I have a pwm controller with a potmeter 0-5v I want to use a throttle with hall sensor but it only goes from 0.8v till 4,2v can I use this product? And can I buy it somewhere?