

Forlinx
-
Posts
64 -
Joined
-
Last visited
-
Days Won
1
Recent Profile Visitors
3,910 profile views

Forlinx's Achievements
")





-
 Purpose of Trimming Customers sometimes have certain requirements for the boot time after power-on, so it is necessary to tailor the kernel to optimize the boot time and reduce it.Low system power consumption. Brief Introduction to Makefiles, Kconfig and .config Files Makefile: A file in text form that compiles the source files Kconfig: A file in text for the kernel's configuration menu. .config: The configuration on which the kernel is compiled Kconfig and Makefile files are usually present in the directory structure of the Linux kernel. Distributed at all levels of the catalogue Kconfig constitutes a distributed database of kernel configurations, with each Kconfig describing the kernel associated with the source files of the directory to which it belongs. Configuration menu. Read out the configuration menu from Kconfig when the kernel graphically configures make menuconfig, and save it to.config after the user finishes the configuration. When the kernel is compiled, the main Makefile calls this.config to know how the user has configured the kernel. Introduction to Makefile and Kconfig Syntax ● Makefile The Makefile subdirectory is contained by the top-level Makefile. It is used to define what is compiled as a module and what is conditionally compiled. (1) Direct compilation obj-y +=xxx.o It means that xxx.o is compiled from xxx.c or xxx.s and compiled directly into the kernel. (2) Conditional compilation obj-$(CONFIG_HELLO) +=xxx.o The CONFIG_XXX of the .config file determines whether a file is compiled into the kernel or not. (3) Module compilation obj-m +=xxx.o It means that xxx is compiled as a module, i.e. it is compiled when make modules is executed. ● Kconfig Each config menu item has a type definition. bool: boolean type, tristate: three states (built-in, module, remove), string: a sequence of characters, hex: hexadecimal, integer: a whole number Function: determine the menu item displayed when make menuconfig. 1) NEW _ LEDS: The name of the configuration option. The prefix "CONFIG _" "is omitted. 2) tristate: Indicates whether the item is programmed into the kernel or into a module. The display as < >, if selected to compile as a kernel module, it will generate a configuration CONFIG_HELLO_MODULE=m in .config. Choosing Y will directly compile into the kernel, generating a configuration CONFIG_HELLO_MODULE=y in .config. 3) bool: This type can only be checked or unchecked. It is displayed as [ ] when making menuconfig, that is, it cannot be configured as a module. 4) dependon: This option depends on another option, only when the dependon is checked, the prompt message of the current configuration item will appear to set the current configuration item. 5) select: Reverse dependency, when this option is checked, the item defined after select is also checked. 6) help: help information. tristate and bool followed by strings are the configuration item names displayed in make menuconfig. Definitions in Kconfig like "menuconfig NEW_LEDS" or "menu "Video support for sunxi"" are typically top-level directories of a directory, where in menuconfig you can directly trim the corresponding driver by searching for that configuration item. Catalogue Hierarchy Iteration : In Kconfig, there are statements like "source "drivers/usb/Kconfig"" used to include (or nest) new Kconfig files, allowing each directory to manage its own configuration content without having to write all those configurations in the same file, making it easier for modification and management. Partially Driven Tailoring 1. Tailoring Ideas Taking the GPADC function as an example, the location of the driver in the source code kernel is:drivers/input/sensor/sunxi_gpadc.c, So we can go to the Kconfig file in that path, and directly search for "menu” in the Kconfig file, which generally corresponds to the top-level directory of that driver. We can see that the configuration option is named INPUT_SENSOR, corresponding to the name "Sensors" in menuconfig. Afterwards, we can directly search for this configuration option in menuconfig. Execute make menuconfig at the kernel path ARCH=arm64 Enter the graphical configuration interface: On this screen, type /, then INPUT_SENSOR, and press Enter. As shown in the figure, this item is configured under the Device Drivers ---> Input device support path, and the Generic The "input layer (needed for keyboard, mouse, ...)" configuration option is set to "y" (yes). Cancel the configuration for Sensors, then save and exit as a .config file. Afterwards, go back to the OKT507-linux-sdk path, compile the kernel separately, and then package the image. forlinx@ubuntu:~/work/OKT507-linux-sdk$ ./build.sh kernel forlinx@ubuntu:~/work/OKT507-linux-sdk$ ./build.sh pack 2. Partial Drive Path Device Location of the driver in the source kernel Device Name Path in Menuconfig Wifi Wifi wlan0 Device Drivers ---> Remove:Network device support Network card drivers/net/ethernet/allwinner/ /sys/class/net/eth* Hdmi drivers/video/fbdev/sunxi/disp2/hdmi2/ /dev/fb1 Device Drivers ---> Graphics support ---> Frame buffer Devices ---> Video support for sunxi --->Remove: HDMI2.0 Driver Support(sunxi-disp2) (not yet fully modified) Usb-U disk drivers/usb/storage/ /dev/sdx Device Drivers ---> USB support ---> Remove:USB Mass Storage support USB-4G drivers/usb/serial/ /dev/ttyUSB* Device Drivers ---> USB support --->Remove:USB Serial Converter support Usb-camera drivers/media/usb/uvc/uvc_video.c Device Drivers ---> Multimedia support ---> Media USB Adapters --->Remove:USB Video Class (UVC) Usb-camera drivers/media/usb/uvc/uvc_video.c Device Drivers ---> Multimedia support ---> Media USB Adapters --->Remove:USB Video Class (UVC) Watchdog drivers/watchdog/sunxi_wdt.c /dev/watchdog Device Drivers ---> Remove:Watchdog Timer Support Bluetooth drivers/bluetooth/ Networking support ---> Bluetooth subsystem support ---> Bluetooth device drivers --->Uncheck all (remember to record the original configuration) Audio sound/soc/sunxi /dev/snd/ Device Drivers ---> Sound card support ---> Advanced Linux Sound Architecture ---> ALSA for SoC audio support ---> Allwinner SoC Audio support --->Uncheck all (remember to record the original configuration) Pwm drivers/pwm/pwm-sunxi.c /sys/class/pwm/ Device Drivers ---> Remove:Pulse-Width Modulation (PWM) Support OV5640_DVP drivers/media/platform/sunxivin/modules/sensor/ov5640.c /dev/video* Device Drivers ---> Multimedia support ---> V4L platform devices --->Remove:sunxi video input (camera csi/mipi isp vipp)driverOpen OKT507-linux-sdk/kernel/linux-4.9/drivers/media/platform/Makefile,comment out obj-y += OV5640_MIPI drivers/media/platform/sunxivin/modules/sensor/ov5640_mipi.c TP2854M drivers/media/platform/sunxivin/modules/sensor/tp2854_mipi.c sunxi_car_reverse/ Device Location of the driver in the source kernel Path in Menuconfig Device Name GT911 touch drivers/input/touchscreen/gt911.c Device Drivers ---> Input device support ---> Touchscreens --->Remove:Goodix I2C touchscreen gt911、Goodix I2C touchscreen gt928、TSC2007 based touchscreens /dev/input/event*View event with evtestCorresponding name, for example:The corresponding name of GPADC issunxi-gpadc0sunxi-gpadc1sunxi-gpadc2sunxi-gpadc3 GT928 touch drivers/input/touchscreen/gt928.c TSC2007 touch drivers/input/touchscreen/tsc2007.c LRADC drivers/input/keyboard/sunxi-keyboard.c drivers/input/keyboard/sunxi-keyboard.c GPADC drivers/input/sensor/sunxi_gpadc.c Device Drivers ---> Input device supportRemove:Sensors IR drivers/media/rc/sunxi-ir-dev.c Device Drivers ---> Multimedia support Remove:Remote controller decoders、Remote Controller devices RTC drivers/rtc/rtc-rx8010.c Device Drivers ---> Remove:Real Time Clock /dev/rtc0 The above is the trimming of one of the drivers, other functions can be trimmed following the methods mentioned earlier.
Purpose of Trimming Customers sometimes have certain requirements for the boot time after power-on, so it is necessary to tailor the kernel to optimize the boot time and reduce it.Low system power consumption. Brief Introduction to Makefiles, Kconfig and .config Files Makefile: A file in text form that compiles the source files Kconfig: A file in text for the kernel's configuration menu. .config: The configuration on which the kernel is compiled Kconfig and Makefile files are usually present in the directory structure of the Linux kernel. Distributed at all levels of the catalogue Kconfig constitutes a distributed database of kernel configurations, with each Kconfig describing the kernel associated with the source files of the directory to which it belongs. Configuration menu. Read out the configuration menu from Kconfig when the kernel graphically configures make menuconfig, and save it to.config after the user finishes the configuration. When the kernel is compiled, the main Makefile calls this.config to know how the user has configured the kernel. Introduction to Makefile and Kconfig Syntax ● Makefile The Makefile subdirectory is contained by the top-level Makefile. It is used to define what is compiled as a module and what is conditionally compiled. (1) Direct compilation obj-y +=xxx.o It means that xxx.o is compiled from xxx.c or xxx.s and compiled directly into the kernel. (2) Conditional compilation obj-$(CONFIG_HELLO) +=xxx.o The CONFIG_XXX of the .config file determines whether a file is compiled into the kernel or not. (3) Module compilation obj-m +=xxx.o It means that xxx is compiled as a module, i.e. it is compiled when make modules is executed. ● Kconfig Each config menu item has a type definition. bool: boolean type, tristate: three states (built-in, module, remove), string: a sequence of characters, hex: hexadecimal, integer: a whole number Function: determine the menu item displayed when make menuconfig. 1) NEW _ LEDS: The name of the configuration option. The prefix "CONFIG _" "is omitted. 2) tristate: Indicates whether the item is programmed into the kernel or into a module. The display as < >, if selected to compile as a kernel module, it will generate a configuration CONFIG_HELLO_MODULE=m in .config. Choosing Y will directly compile into the kernel, generating a configuration CONFIG_HELLO_MODULE=y in .config. 3) bool: This type can only be checked or unchecked. It is displayed as [ ] when making menuconfig, that is, it cannot be configured as a module. 4) dependon: This option depends on another option, only when the dependon is checked, the prompt message of the current configuration item will appear to set the current configuration item. 5) select: Reverse dependency, when this option is checked, the item defined after select is also checked. 6) help: help information. tristate and bool followed by strings are the configuration item names displayed in make menuconfig. Definitions in Kconfig like "menuconfig NEW_LEDS" or "menu "Video support for sunxi"" are typically top-level directories of a directory, where in menuconfig you can directly trim the corresponding driver by searching for that configuration item. Catalogue Hierarchy Iteration : In Kconfig, there are statements like "source "drivers/usb/Kconfig"" used to include (or nest) new Kconfig files, allowing each directory to manage its own configuration content without having to write all those configurations in the same file, making it easier for modification and management. Partially Driven Tailoring 1. Tailoring Ideas Taking the GPADC function as an example, the location of the driver in the source code kernel is:drivers/input/sensor/sunxi_gpadc.c, So we can go to the Kconfig file in that path, and directly search for "menu” in the Kconfig file, which generally corresponds to the top-level directory of that driver. We can see that the configuration option is named INPUT_SENSOR, corresponding to the name "Sensors" in menuconfig. Afterwards, we can directly search for this configuration option in menuconfig. Execute make menuconfig at the kernel path ARCH=arm64 Enter the graphical configuration interface: On this screen, type /, then INPUT_SENSOR, and press Enter. As shown in the figure, this item is configured under the Device Drivers ---> Input device support path, and the Generic The "input layer (needed for keyboard, mouse, ...)" configuration option is set to "y" (yes). Cancel the configuration for Sensors, then save and exit as a .config file. Afterwards, go back to the OKT507-linux-sdk path, compile the kernel separately, and then package the image. forlinx@ubuntu:~/work/OKT507-linux-sdk$ ./build.sh kernel forlinx@ubuntu:~/work/OKT507-linux-sdk$ ./build.sh pack 2. Partial Drive Path Device Location of the driver in the source kernel Device Name Path in Menuconfig Wifi Wifi wlan0 Device Drivers ---> Remove:Network device support Network card drivers/net/ethernet/allwinner/ /sys/class/net/eth* Hdmi drivers/video/fbdev/sunxi/disp2/hdmi2/ /dev/fb1 Device Drivers ---> Graphics support ---> Frame buffer Devices ---> Video support for sunxi --->Remove: HDMI2.0 Driver Support(sunxi-disp2) (not yet fully modified) Usb-U disk drivers/usb/storage/ /dev/sdx Device Drivers ---> USB support ---> Remove:USB Mass Storage support USB-4G drivers/usb/serial/ /dev/ttyUSB* Device Drivers ---> USB support --->Remove:USB Serial Converter support Usb-camera drivers/media/usb/uvc/uvc_video.c Device Drivers ---> Multimedia support ---> Media USB Adapters --->Remove:USB Video Class (UVC) Usb-camera drivers/media/usb/uvc/uvc_video.c Device Drivers ---> Multimedia support ---> Media USB Adapters --->Remove:USB Video Class (UVC) Watchdog drivers/watchdog/sunxi_wdt.c /dev/watchdog Device Drivers ---> Remove:Watchdog Timer Support Bluetooth drivers/bluetooth/ Networking support ---> Bluetooth subsystem support ---> Bluetooth device drivers --->Uncheck all (remember to record the original configuration) Audio sound/soc/sunxi /dev/snd/ Device Drivers ---> Sound card support ---> Advanced Linux Sound Architecture ---> ALSA for SoC audio support ---> Allwinner SoC Audio support --->Uncheck all (remember to record the original configuration) Pwm drivers/pwm/pwm-sunxi.c /sys/class/pwm/ Device Drivers ---> Remove:Pulse-Width Modulation (PWM) Support OV5640_DVP drivers/media/platform/sunxivin/modules/sensor/ov5640.c /dev/video* Device Drivers ---> Multimedia support ---> V4L platform devices --->Remove:sunxi video input (camera csi/mipi isp vipp)driverOpen OKT507-linux-sdk/kernel/linux-4.9/drivers/media/platform/Makefile,comment out obj-y += OV5640_MIPI drivers/media/platform/sunxivin/modules/sensor/ov5640_mipi.c TP2854M drivers/media/platform/sunxivin/modules/sensor/tp2854_mipi.c sunxi_car_reverse/ Device Location of the driver in the source kernel Path in Menuconfig Device Name GT911 touch drivers/input/touchscreen/gt911.c Device Drivers ---> Input device support ---> Touchscreens --->Remove:Goodix I2C touchscreen gt911、Goodix I2C touchscreen gt928、TSC2007 based touchscreens /dev/input/event*View event with evtestCorresponding name, for example:The corresponding name of GPADC issunxi-gpadc0sunxi-gpadc1sunxi-gpadc2sunxi-gpadc3 GT928 touch drivers/input/touchscreen/gt928.c TSC2007 touch drivers/input/touchscreen/tsc2007.c LRADC drivers/input/keyboard/sunxi-keyboard.c drivers/input/keyboard/sunxi-keyboard.c GPADC drivers/input/sensor/sunxi_gpadc.c Device Drivers ---> Input device supportRemove:Sensors IR drivers/media/rc/sunxi-ir-dev.c Device Drivers ---> Multimedia support Remove:Remote controller decoders、Remote Controller devices RTC drivers/rtc/rtc-rx8010.c Device Drivers ---> Remove:Real Time Clock /dev/rtc0 The above is the trimming of one of the drivers, other functions can be trimmed following the methods mentioned earlier. -
Problems Description: When using the Forlinx RK3588 SoM and a homemade carrier board, the system enters MaskRom mode as soon as it's powered on. The difference between the Forlinx carrier board and the homemade carrier board lies in the value of the ground capacitors in Figure 1, where one is 10uF and the other is 100nF. Solutions: The MaskRom mode of OK3588-C can only be pulled low to GND by the BOOT _ SARADC _ IN0 when the CPU starts to detect. The OK3588-C development board enters MaskRom mode by tapping the BOOT _ SARADC _ IN0 to GND. As shown in the figure 1: This part of the circuit has a 100 nF capacitor C3 to ground. If this capacitor is replaced with a larger one, such as a 10 uF capacitor, it will cause the development board to enter MaskRom mode as soon as it is powered on. Figure 1 This is because capacitors have the property of blocking direct current while allowing alternating current to pass, and they also exhibit charging and discharging characteristics. When the power is turned on, the capacitor charges instantaneously, and the voltage across the capacitor cannot change abruptly. Initially, the voltage across the capacitor is zero while it charges, and then it rises exponentially according to a certain pattern until it reaches a steady state. Entering a steady state is equivalent to an open circuit. The charging process is shown in Figure 2. Figure 2 The charging and discharging time of a capacitor increases as its capacitance value increases. A 10uF capacitor has a longer charging time, and it enters a steady state slowly. When the OK3588-C SoM starts up, if the CPU detects that the signal level of the BOOT_SARADC_IN0 pin is within the low voltage range, it assumes that this pin is pulled to GND, thus entering MaskRom mode. The solution is to remove the 10uF capacitor or replace it with a 100nF capacitor.
-
Pressure displacement analyzer is a professional instrument used to measure the deformation of materials under force. It can measure the pressure, strain, displacement and other mechanical parameters of the material, and analyze and process the parameters through the built-in software system and algorithm, so as to obtain the mechanical properties of the material. Pressure and displacement analyzer is widely used in material science, machinery manufacturing, construction engineering, aerospace and other fields. With the continuous progress of science and technology and the rapid development of industrial manufacturing, the requirements for the mechanical properties of materials in industrial production are also rising, so more accurate and reliable measuring instruments are needed to meet the demand. The emergence of stress-strain displacement analyzers fills the gap in material mechanics performance testing equipment, greatly enhancing the accuracy and efficiency of material testing. The characteristics of stress-strain displacement analyzers to be considered during use include: High-precision measurement: It can measure the displacement change of the object under the action of pressure with high precision to ensure the accuracy and reliability of the measurement results; High reliability: It can measure stably for a long time under extreme conditions, and is suitable for various complex environments and application scenarios; The operation is simple, and the complex measurement task can be realized through simple operation, so that the work efficiency is improved; Multi-functional: It can perform various functions such as automatic recording, data processing, result analysis, and report generation to meet the needs of different application scenarios; Intuitive display: Pressure displacement analyzers usually have LCD displays, which can intuitively display measurement results and parameters, making it easy for users to carry out real-time monitoring and data analysis; Convenient data processing: Measurement data can be stored in the internal memory or external devices, and support a variety of data format export, convenient for users to carry out later data processing and analysis. Forlinx Embedded recommends using FETMX8MM-C as the product implementation solution. In this solution, the main functions of the i.MX8MM-C SoM are: The human-machine interaction module displays real-time data transmitted from the MCU via MIPI, and performs drawing and data display; Data processing and storage is achieved through USB interface conversion to ULPI LINK for communication with the MCU end. Data is received and stored in TF cards or USB drives, then processed to output in a more concise and understandable form; Network transmission and remote control are facilitated through a Gigabit Ethernet port, allowing for remote monitoring of screens, network backups, and system parameter restoration. Advantages: Equipped with an ARM Cortex-A53 quad-core CPU running at 1.8GHz and paired with 2GB of DDR4 RAM, it offers high performance and computational power, providing a significant advantage in data processing; The compact size of only 56mm * 36mm meets the requirements of miniaturization and portability of equipment and reduces the size of products; Support 4-line mipi display, maximum 1.5g bps transmission, high-definition output image; Long supply cycle, join NXP product long-term supply plan, guarantee at least 10 years of supply period; The operating environment temperature ranges from -40°C to 85°C, meeting the requirements for industrial and general industrial applications. The above is the pressure displacement curve analysis solution provided by Forlinx Embedded based on the FETMX8MM-C SoM. We hope it can assist you in your selection process.
-
HMI (Human-Machine Interface) is a medium for interaction and information exchange between systems and users. It is essential in fields involving human-machine communication and can be seen in many industries. As technology advances, HMI continues to evolve. In addition to data collection, control, and display, future HMI will incorporate new interactive forms to enable machines to operate more intelligently and interact more efficiently with humans. The increasing demand for more intelligent human-machine interactions also raises higher requirements for processors used in HMI applications. To assist engineers with terminal development requirements in selecting the main controller, in this article, the author will provide a detailed explanation of the three key elements that will influence the next generation of HMI. Smarter Interaction AI support will help the new generation of HMI achieve more powerful functions. For example, AI face recognition can be used to realize human access to devices, and AI gesture recognition can also be used to realize contactless control between people and devices. At the same time, it also allows the equipment to monitor and analyze the current system status more accurately. For example, in the medical field, intelligent HMI systems can allow doctors to interact with medical devices through gestures. Balance of Power Consumption And Performance AI function support puts forward higher requirements for the performance of processors, and the high integration and performance improvement of chips will inevitably increase power consumption and generate more heat. For devices with limited size to be able to adapt to a more diverse and complex environment, it is very important to have multiple power consumption mode options - the freedom to choose between high power consumption, low power consumption, and ultra-low power consumption modes. This not only allows performance to be properly optimized, but also helps to better control costs, achieving a balance between power consumption and performance. Enhanced Communication Capabilities The increase in real-time industrial communication protocols has also brought new challenges to the new generation of HMI applications. For example, the HMI applied in the smart factory not only needs to carry the task of exchanging information between people and equipment, but also needs to complete the function of communicating with other machines and equipments, which means that the HMI needs to have a stronger connection and control function. FET6254-C SoM launched by Forlinx Embedded not only meets the traditional HMI's human-computer interaction needs but also can realize the three key elements mentioned above, empowering the new generation of HMI. FET6254-C System on module is built on the TI Sitara™ AM6254 industrial-grade processor, featuring a quad-core Arm Cortex-A53 architecture with a maximum frequency of up to 1.4GHz. It enables edge AI capabilities, making the HMI smarter and more intelligent. During the development process, rigorous environmental temperature testing, pressure testing, and long-term stability testing were conducted to ensure that it can operate stably in harsh environments. Not only the performance is guaranteed, but also the power consumption can be very low. Through a simplified power architecture design, the AM62x processor exhibits extremely low power consumption performance, with power as low as 5mW in deep sleep mode. With a core voltage of 0.75V, the operating power can be kept below 1.5W, greatly reducing system power consumption. AM62x processor, as the next-generation MPU product in the TI Sitara™ product line, offers richer resource interfaces compared to the previous generation classic processor, the AM335x. It includes features such as 2 x Gigabit Ethernet with TSN support, 3 x CAN-FD, 9 x UART, 2 x USB 2.0, 2 x LVDS interfaces, RGB, camera, audio, and more. This enhances the product's scalability and flexibility for various applications. In addition to the advantages mentioned above, Forlinx Embedded has also ported a Chinese input method for the Linux system on the FET6254-C SoM. This makes it more convenient to invoke applications and helps users simplify their development workload. Moreover, the FET6254-C embedded board supports system burning via USB flash drive or TF card and can replace Uboot, Kernel, and device tree in the operating system, making it easy to achieve remote updates for products and helping users save on-site maintenance costs. The combination of stable quality and rich functionality allows Forlinx Embedded's FET6254-C core board to demonstrate unique advantages in next-generation HMI applications, empowering HMI across industries such as industrial control, power, transportation, and healthcare. This enables machines to operate more intelligently and interact more efficiently with humans. The above is the HMI solution recommendation based on the Forlinx Embedded FET6254-C SoM. We hope it can be helpful for your product design.
-
1. Compile the fw_printenv tool Execute under the uboot source path, and then generate the executable file of the fw _ printenv under tools/env. . /opt/fsl-imx-x11/4.1.15-2.0.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabimake env 2. Configure fw_env.config file Modify the fw_env.config file under tools/env in the uboot source directory according to the mtd partition, the location and size of the UBOOT environment variables, etc. See the instructions in the fw_env.config file and the /tools/env/README file for specific modifications. Among them, Device offset, Env size, and Flash sector size should correspond respectively to the three macro definitions CONFIG_ENV_OFFSET, CONFIG_ENV_SIZE, and CONFIG_ENV_SECT_SIZE in the include/configs/xxxx.h file in the U-Boot source code directory. vi include/configs/mx6ul_14x14_evk.h Take the test 256nand as an example: CONFIG_ENV_OFFSET = 0x600000 ONFIG_ENV_SECT_SIZE = 0x20000 Open the tools/env/fw_env.config and modify as shown in the following figures: Take the test 1gnand as an example: CONFIG_ENV_OFFSET = 0x1000000 ONFIG_ENV_SECT_SIZE = 0x20000 nand model number MT29F8G08ABACA Refer to the manual to change the ENV_SECT_SIZE value to 256K. Open the tools/env/fw_env.config and modify as shown in the following figures: nand model number MT29F8G08ABABA Refer to the manual to change the ENV_SECT_SIZE value to 512K. Open the tools/env/fw_env.config and modify as shown in the following figures: 3. Copy the file Copy tools/env/fw_env.config to the /etc path of the development board; Copy tools/env/fw_printenv to the root file system of the development board under the path /usr/bin. And create a soft link to fw_setenv ln -s /usr/bin/fw_printenv /usr/bin/fw_setenv 4. Read and write environment variable test Read environment: Write environment variable: The uboot phase has been modified synchronously. 5. Problems and solutions Problem: make env reports an error in the uboot source code Solution: Comment out the CC in the top-level Makefile and use the environment variable in the CC.
-
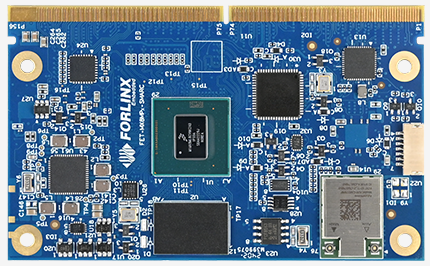
FET-MX8MP-SMARC System on Module(SoM) is developed based on the NXP i.MX 8M Plus processor, focusing on machine learning, vision, advanced multimedia, and highly reliable industrial automation. It caters to applications such as smart cities, industrial IoT, smart healthcare, and intelligent transportation. With powerful quad-core or dual-core ARM® Cortex®-A53 reaching up to 1.6GHz and an NPU achieving 2.3 TOPS, it integrates ISP and dual camera inputs for efficient advanced vision systems. Multimedia features include video encoding (including H.265) and decoding, 3D/2D graphics acceleration, and various audio and voice functions. Real-time control is achieved through Cortex-M7, with a powerful control network using CAN-FD and dual Gigabit Ethernet, supporting Time-Sensitive Networking (TSN). It features high-speed communication interfaces such as 2 x USB 3.0, 1x PCIe 3.0, and 1x SDIO 3.0, meeting the requirements of 5G networks, high-definition video, dual-band WiFi, high-speed industrial Ethernet, and other applications. Explore more about this SoM now! https://www.forlinx.net/product/imx8mpq-smarc-system-on-module-153.html
-
1. LVDS Interface Specification Forlinx Embedded OK6254-C development board provides 2 x 4-lane LVDS display serial interfaces supporting up to 1.19Gbps per lane; the maximum resolution supported by a single LVDS interface is WUXGA (1920 x 1200@60fps, 162MHz pixel clock). In addition, the interface supports the following three output modes: (1) Single-channel LVDS output mode: at this time, only 1 x LVDS interface displays output; (2) 2x single-channel LVDS (copy) output mode: in this mode, 2 x LVDS display and output the same content; (3) Dual LVDS output mode: 8-lane data and 2-lane clock form the same display output channel.Forlinx Embedded OK6254-C development board is equipped with dual asynchronous channels (8 data, 2 clocks), supporting 1920x1200@60fps. All signals are by default compatible with Forlinx Embedded's 10.1-inch LVDS screen, with a resolution of 1280x800@60fps. 2. Output Mode Setting (1) Single LVDS output mode: We need a single LVDS screen cable. The black port of the cable is connected to the embedded OK6254-C development board, and the white port is connected to the embedded 10.1-inch LVDS display screen. Connection method as shown in the figure below: Note that the red line section corresponds to the triangle position, so don't plug it in wrong. (2) 2x single LVDS (duplicate) output mode: This mode uses the same connections as the Single LVDS Output Mode. Two white ports link to two 10.1-inch LVDS screens from Forlinx Embedded, and a black port on the right connects to the OK6254-C board's LVDS interface for dual-screen display. (3) Dual LVDS output mode: The maximum resolution supported by a single LVDS interface on the OK6254-C development board is WUXGA (1920 x 1200@60fps). To achieve this high-resolution display output, dual LVDS output mode is required. It is worth noting that the connection between the development board and the screen in this mode is the same as in [Single LVDS Output Mode], but the LVDS cable's and the screen's specifications have been improved. 3. Screen Resolution Changing Method OK6254-C development board device tree is easy to modify, we need to open the OK6254-C-lvds.dts (single 8-way configuration) and OK6254-C-lvds-dual.dts (dual 8-way configuration) files. Open OK6254-C-lvds.dts Open OK6254-C-lvds-dual.dts The above figure is the single LVDS and dual LVDS screen resolution information, the default resolution of 1024 * 600, and the maximum resolution support of 1920x1200, you can modify the corresponding parameters according to the Screen User’s Manual. 4. Compilation Configuration Because we only modified the device tree, we don't need a full compilation. After compiling the kernel, a new Image and multiple device tree files will be generated in the images directory. Here we only need to compile the kernel separately. (1) Switch directory: cd OK6254-linux-sdk/ (2) Execution environment variables:.. build.sh (3) Execute the instructions that compile the kernel separately: sudo./build. Sh kernel. (4) Pack all the device tree files to the development board /boot/ directory and replace them, then sync save and reboot scp images/OK6254-C* [email protected]:/boot/ We have modified the corresponding file. How should we select the screen after replacing it? At present, there are three kinds of screen switching control methods: kernel device tree designation, Uboot menu dynamic control, Forlinx Desktop interface and Uboot menu application. Today, I will briefly introduce the dynamic control of Uboot menu. During Uboot, pressing the space bar will take you to the Uboot menu. There are three options in the menu: Enter 0 to enter the Uboot command line; Enter 1 to restart Uboot; Enter 2 to enter the Display Configuration menu. There are three options in the menu: Enter 0 to return to the previous menu; Enter 1 will toggle what option 1 displays to configure Screen 1 LVDS; Note: Screen 1 supports single LVDS, dual LVDS, and off (i.e., LVDS off) Enter 2 to toggle the display of option 2 to configure the Screen 2 LCD. Note: Screen 2 supports 1024 * 600 resolution LCD screen, 800 * 480 resolution LCD screen and off (i.e. RGB off) When selecting the LVDS screen, we enter 1 to select single 8-channel LVDS or dual 8-channel LVDS. After selecting the desired configuration, enter 0 to return to the previous menu level. Restart Uboot or enter the command line to start the system, which can make the screen settings take effect. For other resolution screens, please modify the kernel device tree screen parameters according to the screen parameter requirements.
-
As engineering vehicles become smarter, onboard dashboards and 360°surround view systems are now standard configuration. The onboard dashboard monitors vehicle status in real-time, while the 360° surround view system offers a complete view of the surroundings, helping drivers better get the vehicle’s surroundings. To meet market demand and enhance the safety performance and operational efficiency of engineering vehicles, we offer the following solutions: onboard dashboard and 360° surround view system for engineering vehicles. Function Description: Real-time Monitoring: Through the onboard dashboard, drivers can instantly access the operational status of engineering vehicles, such as engine speed, vehicle speed, hydraulic oil pressure, etc. Simultaneously, the 360° surround view system can instantly collect image data of the vehicle's surrounding environment, offering a comprehensive perspective to assist drivers in better understanding their surroundings. Data Display and Interaction: The on-board instrument panel has a clear and intuitive interface, which can display various data and information. Drivers can interact with the instrument panel through the touch screen or other input devices to achieve information inquiry, parameter setting, and other functions. Remote Monitoring and Diagnosis: Through the communication module, this solution can achieve communication with the remote monitoring center, upload the vehicle operation status data and image data of the 360° Around View system, and receive remote control commands. This helps the management personnel conduct remote management of vehicles and improve operation efficiency. Stability and Reliability: Both the hardware and software designs of this solution possess high stability and reliability, enabling them to operate stably for a long time in complex vehicle environments without being prone to malfunctions or damage. Easy to Operate and Maintain: This solution offers drivers seamless usage with minimal maintenance costs. Forlinx Embedded recommends the FETT507-C SoM as a hardware solution. Here are the optimizations and extensions of the solution: 1. Support for AHD Analog High-definition Cameras: The FETT507-C SoM integrates AHD analog high-definition camera input and adopts the MIPI_CSI solution to enable signal acquisition from four AHD analog cameras. This not only provides a comprehensive view but also assists drivers in better understanding the surroundings of the vehicle, thereby enhancing driving safety. 2. Stable CAN Data Acquisition: By utilizing a stable and mature SPI-to-CAN conversion solution, real-time vehicle operational data can be collected, providing robust support for vehicle monitoring and data analysis. 3. Flexible Expansion with Multiple Interfaces: Supporting the I2C interface allows for convenient integration of audio chips for in-vehicle audio data acquisition or connection to other external sensors. Additionally, it supports four display output interfaces including RGB, LVDS, HDMI, and CVBS, with a maximum display resolution of 4K, meeting the display needs of different sizes and resolutions. 4. Communication and Positioning Capabilities: The FETT507-C SoM integrates GPS and 4G modules to enable daily vehicle communication, remote access, and positioning functions, providing support for remote vehicle monitoring. 5. Real-time Video Stream Storage: The SoM supports external SD card connection for real-time video stream storage, facilitating easy playback and data analysis. 6. GPIO Interface and Button Functionality: The provision of GPIO interfaces caters to various physical button function requirements, facilitating user operation and control. 7. Support for Multiple Operating Systems: The FETT507-C system on module supports various operating systems, including Linux 4.9 and Android 10.0, offering users greater possibilities for further development.
-
Dust is an open source of pollution due to dust on the ground, human-driven and driven to fly into the atmosphere, and is an important part of the total ambient air. Suspended particulate matter in the ambient air lasts for a long time and can be inhaled. Once the inhalable particulate enters the human body, it will accumulate in the respiratory system and cause many diseases, which is harmful to human beings. Dust monitoring is a real-time on-line monitoring measure to prevent and control air pollution. The dust monitoring equipment can monitor the atmospheric particulate matter concentration, PM value, temperature, humidity, wind speed, wind direction and other data in real time, and the dust pollution can be prevented and rectified in time by means of real-time data monitoring and alarm. The online monitoring system can save a lot of manpower and material resources and provide quantitative data support for on-site treatment and administrative enforcement. After the online monitoring system is installed, continuous and uninterrupted monitoring will be carried out. It mainly monitors respirable particulate matter and is complemented by a video monitoring system, a noise monitoring system, a meteorological system, a data acquisition system, and a communication system. The online automatic monitoring system is mainly used for online dust, environmental protection, meteorological station, tunnel and other online dust monitoring, unorganized smoke and dust pollution source emissions, residential areas, commercial areas, road traffic, construction areas, etc.; online real-time automatic monitoring of ambient air quality, and can obtain evidence through the camera. The real-time data from the weather station monitoring and the tunnel subway station can be transmitted to the data platform in time through the wired or wireless network for easy management and control. System Components The system consists of a data collector, a sensor, a video monitoring system (optional), a wireless transmission system, a background data processing system and an information monitoring management platform. The monitoring sub-station integrates various functions such as atmospheric PM1.0, PM2.5, PM10 monitoring, ambient temperature and humidity and wind speed and direction monitoring, noise monitoring, video surveillance (optional), etc.; the data platform is a networked platform with Internet architecture, which has the monitoring function of each sub-station and various functions such as alarm processing, recording, querying, statistics, report output, etc. of the data. The system can also be linked with various pollution control devices to achieve the purpose of automatic control. Implementation Scheme The online dust monitoring host can be developed using the FETMX6ULL-C SoM recommended by Forlinx Embedded. Hardware Design: FETMX6ULL-C SoM supports 8 x RS232/RS485/TTL and multi-channel I/O interfaces, which can be connected to dust sensors and other environmental monitoring equipment. At the same time, the industrial design enables it to operate stably in harsh outdoor environment, which ensures the reliability of the monitoring system. Network Communication: FETMX6ULL-C System on Module supports 2 x dual 100m Ethernet and standard TCP/IP and UDP protocol stacks. Monitoring data can be transmitted to the monitoring center or cloud server in real time through the network to realize remote monitoring and management. Wireless Communication: It supports 4G and WiFi wireless communication, and after a long time of stable testing, it can ensure the stable transmission of monitoring data, and even in the absence of wired network, it can also realize the online monitoring function. Screen Display: FETMX6ULL-C supports a variety of LCD screen designs, which enables the monitoring system to select the appropriate display screen according to actual needs, and realize the intuitive display and operation of data. Based on the features of Forlinx Embedded FETMX6ULL-C SoM, the dust online monitoring realization solution can achieve the advantages of rich hardware interfaces, stable network communication, flexible software support, etc. It is suitable for a variety of environmental monitoring scenarios and can meet the needs of the industrial level to guarantee the stability and reliability of the monitoring system.
-
 BreanneJJustice reacted to a post in a topic:
How to Support Virtual Network on Linux 4.1.15?
BreanneJJustice reacted to a post in a topic:
How to Support Virtual Network on Linux 4.1.15?
-
Command 1. The video recording was unsuccessful with the command ffmpeg -framerate 25 -f v4l2 -i /dev/video4 recording1.mp4 . According to the official ffmpeg documentation, -r and -framerate have the same function, but the actual test shows that they are different. -framerate is used to limit the input while -r is used to limit the output 2. Video can be recorded with the command ffmpeg -r 25 -f v4l2 -i /dev/video4 recording1.mp4 , but problems such as frame error and frame repetition will occur. 3. Use ffmpeg -f v4l2 -r 25 -thread_queue_size 128 -i /dev/video4 -vcodec libx264 -b:v 800k-preset ultrafast recording1.mp4 to achieve dual camera video recording at the same time. Parameter Description: ⚫ -f Set the output format, the output format is v412 frame (The commands found earlier all use the framework avfoundation, a full-featured framework for handling multimedia data on iOS, macOS, watchOS, and tvOS. The v412 framework used in this command is a framework for video device drivers in the Linux kernel, which provides a unified interface to the application layer and supports flexible expansion of various complex hardware). ⚫ -r Set frame rate, set frame rate to 25fbs. ⚫ -thread_queue_size (The thread _ queue _ size is applied to the first input specified after it. The term "thread_queue_size" can be applied to all inputs and determines at the application level. How many packets from that input can be queued while waiting for ffmpeg to receive and process them on its main thread. A few capture devices, primarily dshow, use "rtbufsize" to store incoming frames while waiting for them to be transferred to the application-level queue for that input. These two options do not adjust the value of the other, so they should be set manually. The default is 8. Common Warnings: Thread message queue blocking; consider raising the thread_queue_size option (current value: 8). To solve this problem, the official explanation: This option sets the maximum number of packets queued when reading from a file or device. (In low-latency/high-rate real-time streams, packets may be dropped if they are not read in a timely manner; increasing this value prevents this.) ⚫ -i Set input stream, set input from video4 ⚫ -vcodec Set the video encoder,(-vcodec and-codec:v equal in value) Encoders are library files that implement a certain encoding format. Encoding and decoding of video/audio in a certain format can only be achieved if an encoder for that format is installed. Here are some of FFmpeg's built-in video encoders. libx264: The most popular open source H.264 encoder NVENC: NVIDIA GPU-based H.264 encoder libx265: Open source HEVC encoder libvpx: Google's VP8 and VP9 encoders libaom:AV1 Encoder ⚫ -B:v Video bit rate ⚫ -preset specifies the output video quality, which will affect the file generation speed. The following values are available: Ultrafast,superfast,veryfast,faster,fast,medium,slow,slower,veryslow,placebo from fast to slow, the ultrafast transcoding rate is the fastest, and the video is often the most blurred. ⚫ recording1.mp4 Name and file type of the output videoYou can use ffmpeg-formats to get all the file types supported by ffmpeg, where the annotation before the file is as follows: D.=Demuxing supported(Support for video/audio encapsulation) .E=Muxing supported(Support decapsulation of video/audio) Method: Software: ⚫ Ubuntu: 1.Devepoment board networking 2. sudo apt-gat update upgrades apt-gat to the latest version (optional) 3. sudo apt-get install ffmpeg uses apt-gat to obtain ffmpeg 4. Enter relevant commands Hardware: Connect the Forlinx self-made analog camera module to support two cameras. Video4-7 are nodes generated by the TVIN, with the upper left corresponding to video7, lower left corresponding to video6, lower right corresponding to video5, and upper right corresponding to video4. Select according to the actual situation.
-
Taking the FETMX6ULL-C platform as an example, if you want to use VPN, you need to open the tun configuration in the kernel in the following way: Kernel Compilation Choose either of the two methods below: 1. Modify the.config file directly Locate the.config file in the kernel source path. Find the CONFIG _ TUN in the file and modify it as follows: Replace the kernel's config file with .config. * Subject to actual use. Recompile the kernel. 2. Configure the TUN using the graphical configuration interface Make menuconfig. Locate the following locations: Save and exit after modification, which can be seen in.config Replace the kernel's config file with .config. * Subject to actual use. Recompile the kernel. Update kernel: The arch/arm/boot/zImage file is generated after compilation, and the kernel can be replaced either by updating the kernel separately or by re-burning it. Use this file to replace the file with the same name in the target path of the flashing tool. Refer to the single-step kernel update chapter of the FETmx6ull-c User's Manual to replace the zImage file separately. Compilation module: In the kernel source code, some of the drivers are compiled in the form of modules, which are loaded from the specified path by the kernel version number when the system boots. When we recompile the kernel and update the kernel, the kernel version number in the system will be changed, the kernel version number can be viewed through the uname -r command. When you update the kernel, the uname -r version number changes, but the version number in the path where the module is stored (/lib/modules/) does not change. It may cause the module to fail to load, typically after updating the kernel, WiFi cannot be used. As seen below, the name under uanme -r and the name under /lib/modules/ are not the same, so you can't load the module when you go to the/lib/modules/$(uname -r) directory when booting up, and you need to change both names to be the same. You can solve this problem in two ways: 1. Modify the module load path and change to the version number of the kernel; 2. Repackage modules; The first method has two disadvantages: a. Not suitable for batch modification; b. Not suitable for changing the module driver; So it is possible to repackage the module when compiling the kernel: After executing the above operation, .tmp/root/modules.tar.bz2 will be generated, which can replace the file with the same name under the target path in the flashing tool. It is also extracted directly in the file system:
- 1 reply
-
- 1
-
-
- vpn configuration
- imx6ull sbc
- (and 3 more)
-
Edge Computing Access Screen is designed to provide an edge computing-based solution for access control systems. It can realize face recognition, data processing, fingerprint recognition and other functions, and improve the security and convenience of the access control system. In terms of application scenarios, intelligent monitoring and access control system is an important part of intelligent building security. The application of edge computing technology can increase the monitoring effect and response speed, avoid the security risks in the process of data transmission, and protect the privacy of users. Edge computing devices can process authentication faster and improve the response speed and security of access control systems. Hardware requirements for edge computing access control screen (1) Processor Select a high-performance and low-power embedded processor, the processor itself needs to come with arithmetic power to meet the needs of edge computing. (2) Memory Configure appropriate memory and flash for system and application data. (3) Interface Provide necessary interfaces between the carrier board and other devices, such as GPIO, UART, I2C, SPI, etc. (4) Communication module Support Wi-Fi or 4G to facilitate data transmission with the cloud platform. (5) Sensor Integrate multiple sensors, such as face recognition, fingerprint recognition, and RF card reader. Edge Computing Access Control Screen Design The FET3568-C SoM is recommended to be used as the hardware platform of edge computing access control screen. The system on module has a quad-core ARM Cortex-A55 processor with a main frequency of 2.0 GHz, and its own NPU has a computing power of 1TOPS, which can meet the needs of lightweight edge computing tasks. Memory: FET3568-C SoM supports LPDDR4 and eMMC storage, and can be configured with appropriate memory and flash memory to meet the needs of the access control system. Interface: Native GPIO, UART, I2C, SPI, Gigabit port, etc. can communicate with other lines. Communication module: FET3568-C supports wireless communication technologies such as Wi-Fi, Bluetooth, and GPS. The appropriate communication module can be selected according to the requirements. Sensors: FET3568-C supports multiple sensor interfaces, such as GPIO, I2C, SPI, etc., and can easily integrate multiple sensors, including face recognition, fingerprint recognition modules, etc. Power supply module: According to the requirements of the access control system, the appropriate power supply chip can be selected to provide stable and reliable power supply for the entire carrier board. Peripheral expansion: USB and SD card slots are convenient for secondary development and function expansion.
-
Overview Description In modern urban public transport, bus scanning and swiping machines are a convenient and fast payment method that allows passengers to pay their fares more conveniently and quickly, avoiding the problem of finding change as well as the time and security problems associated with cash transactions; it can automatically calculate fares and facilitate statistics and analysis of data, which largely improves the efficiency of bus operation and management; the device not only provides passengers with convenient and efficient bus payment and information services but also enhances the experience of public transportation services. The intelligent bus card reader is equipped with a universal NFC card reader module and an embedded QR code scanner, which can be compatible with the recognition of both public transportation IC card payments and QR code scanning for payment. The system has an open interface for secondary development and docking. Passengers can use smart cards for payment, mobile NFC payment, and QR code scanning payment. It can have an embedded PSAM card slot and can be compatible with universal transit cards, UnionPay, credit cards, and other payment methods, making it a vehicle terminal that supports all payment methods and can be applied globally. What is even more remarkable is that it comes with a high-definition facial recognition camera, which enables in-vehicle mobile facial payment functionality. In particular, with the trend towards autonomous buses in the future, multi-functional vehicle terminals can also be effectively utilized. Features: Two-dimensional code scanning: Support a variety of common two-dimensional code formats.Credit card payment: Support multiple payment methods such as bus card, bank card, IC card, NFC, etc. Information display: Provide high-definition display screen, real-time display of the welcome message, ticket price, deduction status, etc. Audio prompt: Built-in speaker supporting functions such as payment success notification. Data statistics: Payment data can be uploaded to achieve real-time statistics and analysis of data, providing a basis for the optimisation of the public transport system. Remote Positioning: Support remote GPS positioning. Main Functional Interface Programme: Integrated Barcode/IC Card Scanner for Buses Based on FET113i-S - Overall Solution Recommendation: FET113i-S SoM is developed based on the industrial-grade processor Allwinner T113-i, with a main frequency of 1.2GHz, equipped with a multi-core and multi-architecture design: integrating dual-core Cortex-A7 CPU, 64-bit XuanTie C906 RISC-V CPU, and DSP; On-board 256MB + 256MB and 512MB + 8GB configurations to meet product planning options; Support a variety of peripheral interfaces: USB, CAN, I2S, GPIO, UART, SPI; can connect camera module, card module, speaker, 4G/5G, GPS, etc.; Powerful multimedia audio and video processing capabilities, support a variety of display interfaces, including RGB, MIPI-DSI, LVDS interfaces, support H.265 (4K@ 30fps), MPEG-4 (1080p @ 60fps), JPEG (1080p @ 60fps) and other full-format decoding. JPEG/MJPEG (1080p @ 60fps) format encoding; supports 8-bit parallel CSI, CVBS video input, CVBS, RGB, 2-channel LVDS, 4-channel MIPI DSI video output; also suitable for audio-related applications through DSP support.
-
Due to individual differences in oral structure, some traditional oral dental films are difficult to fully adapt to the special conditions of the patient's mouth and may require multiple adjustments and break-ins, and traditional mass production methods cannot meet the demand for personalized dental films. The traditional approach relies heavily on mold production, but this makes it difficult to respond to the needs of individual patient variability. Manufacturing methods usually require a long production cycle, with patients needing to obtain, fit, and adjust the model throughout multiple visits, which increases the time cost of the entire process, and a cumbersome fabrication process that involves multiple processes, including model acquisition, plaster model fabrication, and dental film fitting, which makes the entire fabrication process more costly, including material and labor costs. Meeting the personalized and customized needs of dental health-care is the basis of dental film manufacturing, which happens to be a perfect match for the technical characteristics of 3D printing, thus creating a rapid growth of the dental 3D printing market, as well as fierce competition. A good 3D printing device must have a convenient and user-friendly human-machine interface that allows doctors or technicians to easily operate and monitor the printer status. Not only that but also a wealth of peripheral interfaces, such as USB, RS232/485, CAN, I2C, etc., can fully meet the needs of a variety of external devices and sensors, etc., to set aside enough scalability. To meet the hardware requirements of the main control board for dental and dental 3D printers, Flying Embedded has introduced the FET3568-C platform, which has a rich set of peripheral interfaces including USB, RS232/485, CAN, I2C, etc., and provides powerful connectivity for dental and dental 3D printers. At the same time, the chip platform reserves enough scalability to meet the needs of external devices and sensors, and provides flexible expansion space for the functions of dental equipment. Details of the scheme for realizing the 3D printer in the stomatology department: ARM architecture processor: FET3568-C is based on Rockchip's RK3568 core processor, providing powerful computing capabilities and low power consumption design, suitable for efficient control of oral and dental 3D printers. Motion control and sensor interfaces: The abundant peripheral interfaces of RK3568 chip are used to connect stepper motors, temperature sensors and so on, so as to realize motion control and real-time monitoring of system status. HMI: Equipped with a 7-inch or 10.1-inch high-resolution capacitive touch screen, it provides a convenient and friendly user interaction interface. The touch screen is designed according to the current user's operating habits, making the operation more intuitive and easy to use. 4K display support: Additional interfaces support 4K display, such as HDMI and eDP, for external high-resolution display devices. This ensures clarity and precision of the print control operation. Optical connection: Integrated external optical interface for print control to ensure accuracy and efficiency of dental and dental 3D printers. Network connection and communication interface: The network function of FET3568-C platform is used to realize the remote monitoring and upgrading of equipment. At the same time, other devices and sensors are connected through USB, RS232/485, CAN and other interfaces. Summary: The FET3568-C-based dental and dental 3D printer implementation takes full advantage of the platform's powerful performance and rich peripheral interfaces. The optimization of the human-machine interface, the support of a 4K display, and the connection of multiple sensors ensure efficient, convenient, and precise operation of the equipment, providing advanced digital solutions in the field of oral dentistry.
-
Against the backdrop of rapid development in communication and networking technologies, smart factories are gradually achieving data-driven, networked, and intelligent management. In this trend, the utilization of the Industrial IoT has become an indispensable key step in achieving industrial data collection and control. Traditional industrial data collection and control systems typically require connection to multiple data collection devices, perform high-speed communication, handle complex data processing, and achieve high-definition multimedia display functions. The embedded system based on ARM+FPGA architecture has rich peripheral interfaces, high-definition display high-speed transmission, and other functions, which are more capable of high-speed industrial data acquisition tasks. The flexibility and performance of this embedded system make it an ideal choice to meet the needs of smart factories, which can effectively improve the efficiency and accuracy of industrial data processing. In the industrial data acquisition and control system, high-speed data acquisition system and embedded human-computer interaction system cooperate closely to build an intelligent industrial management system. The main task of the high-speed data acquisition system is to collect the key data in the industrial production process in real time and ensure the accuracy and timeliness of the data. This involves high-speed communication with multiple data acquisition devices, as well as sophisticated data processing and multimedia display capabilities. As the main control center, the embedded human-computer interaction system coordinates and manages each module and resource, and is responsible for receiving the data from the FPGA terminal. It not only visualizes the data to the user, but also achieves more flexible control through human-computer interaction. The system also realizes the connection with the industrial MES + ERP system through the communication module, and transmits the collected data to the cloud for storage. This design not only improves the efficiency of data processing, but also greatly reduces the risk of manual data entry, and realizes the intelligent management of industrial data. The whole system architecture provides a more comprehensive and efficient data management solution for enterprises. This not only helps to reduce human errors in the production process, but also makes better use of human resources and improves production efficiency. With the continuous development of communication and network technology, such industrial data acquisition and control system will become an important support for industrial intelligence in the future. The main control device of the industrial data acquisition control system can adopt Forlinx Embedded FET6254-C SoM, which is based on TI's AM62x series industrial processor design, with the main frequency up to 1.4GHz, is a multi-core heterogeneous processor, adopting the Cortex-A53+Cortex-M4F combination of processing core + control core architecture; the functional safety features can be realised by the M4F core and its dedicated peripherals, and the startup and operation of the M4F core no longer depend on the A53 core. The M4F core and its dedicated peripherals enable functional safety features, and the M4F core is no longer dependent on the A53 core for startup and operation. It can provide excellent data processing capability and human-computer interaction experience, and can control the motor drive module in real time to meet the requirements of data processing, task scheduling and human-computer interaction of the real-time control system. It support parallel bus support for ARM high-speed communication with the FPGA to provide access. FET6254-C supports TI processor-specific general-purpose memory controller interface GPMC, high data read and write rate of up to 100MB / s, support for multiple chip selection, the configuration is more flexible, and at the same time can provide a variety of methods to connect with the peripheral devices and a wide range of external devices can be communicated. The FET6254-C SoM integrates a rich set of functional interfaces. It supports two Gigabit Ethernet with TSN support, which provides fast data transmission and connection capability to meet the demand of industrial data acquisition and control systems for high bandwidth and low latency; it also supports three communication interfaces, such as CAN FD, I2C, I2S, which provide a reliable, high-speed and real-time data transmission method for the normal operation and efficient performance of industrial data acquisition and control system; with rich interface resources such as USB, UART, PWM, SPI, etc., it can be used to connect various sensors, actuators, motor drive modules, and mouse and keyboard devices. The control system provides support for normal operation and efficient performance; with rich interface resources such as: USB, UART, PWM, SPI, etc., can be used to connect a variety of sensors, actuators, motor drive modules, as well as the mouse, keyboard devices, etc., can be achieved in industrial data acquisition and control of a variety of signals and data, to achieve the monitoring and control of the production process; the SoM adopts an industrial-grade temperature and wide range of design, to ensure that the stability and reliability of the product to meet the requirements of industrial application environment.