

10A 400V DC Intelligent Power Module (IPM)
- Rajkumar Sharma
- 17.429 Views
- medium
- Tested
- SKU: EL69039
- Quote Now
- 0 Likes

This 10A -400V DC Intelligent power module board has been designed using ON Semiconductors STK544UC62K. This Inverter IPM module includes the output stage of a 3-phase inverter, pre-drive circuits, bootstrap circuits, protection circuits, op-amp based current sense circuit, comparator circuit for fault/Over current output, Bus voltage output, onboard 5V DC regulator for op-amp circuit. The board can be used to drive AC Induction, BLDC, PMSM motors, and Brushed DC Motors. The module integrates optimized gate drive of the built-in IGBTs to minimize EMI and losses, while also providing multiple on-module protection features including under-voltage or over-voltage, over-current, and fault reporting. The built-in, high-speed HVIC requires only a single supply voltage and translates the incoming logic-level gate inputs to the high-voltage, high-current drive signals required to properly drive the module’s internal IGBTs.
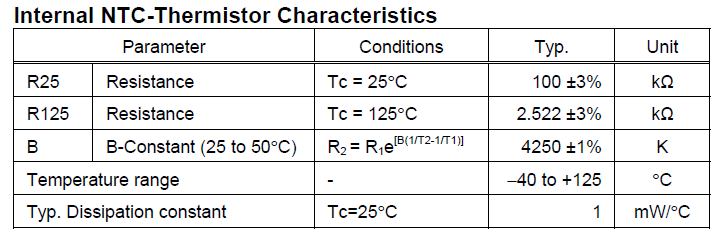
Separate negative IGBT terminals are connected to a shunt resistor to provide the current feedback to the system microcontroller. This IPM module helps to develop various power applications and also can be used as H-Bridge for brushed DC motor. The module mainly helps to drive Hall sensor-based, encoder-based motors and 3 Phase AC Motors. The IC has Built-in dead-time for shoot-thru protection. The internal substrate temperature is measured with an internal pulled-up thermistor. PWM frequency is up to 20 KHz. The board can be used in applications like small machines as speed controller, washing machine, refrigerator, Air condition, automation, AC motor speed controller, dc motor speed controller, brushless dc motor driver, ac servo driver etc.
This board designed to evaluate ON Semiconductors STK544UC62K. The motion IPM is installed as the motor power module on the board to drive a three-phase AC Induction Motor (ACIM), Brushless DC (BLDC) motor, Brushless AC (BLAC) motor, or Permanent-Magnet Synchronous Motor (PMSM). The board has bulk capacitors and microcontroller (MCU) interface circuitry. As this board is designed for a wide variety of motor types, not all included circuitry is required for all types of motors. Some motor types may require some additional circuitry to be added, depending on the control algorithms being implemented.
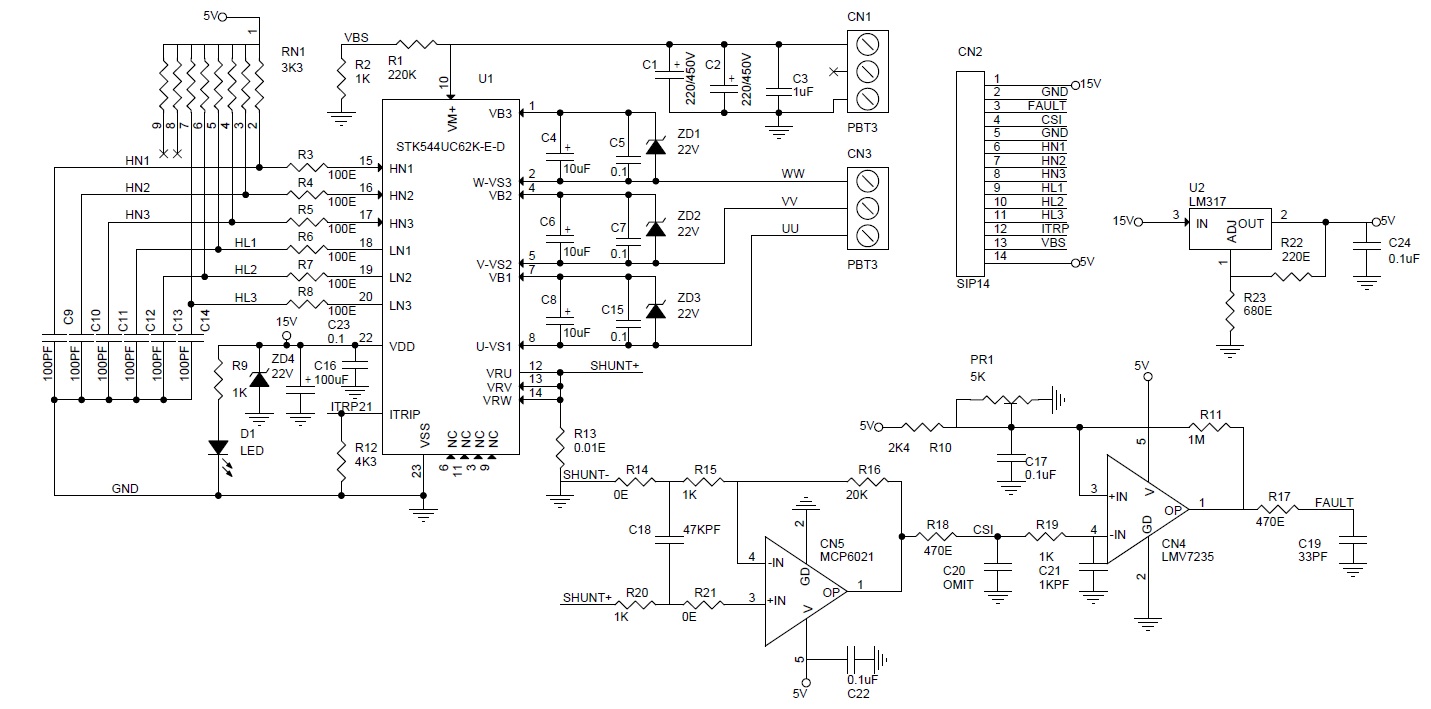
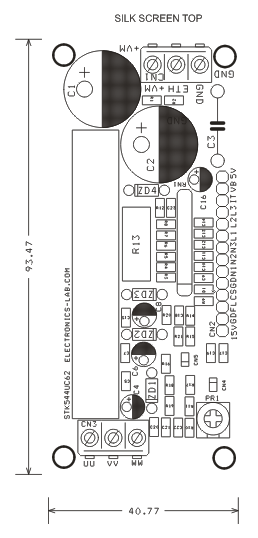
The board is designed to connect to DC power sources feeding current to the motor. The three-phase motor output terminals (UU, VV, and WW) from the screw terminal should be connected to the motor windings. Three bootstrap power supply circuits are designed into the board, one per phase. A bootstrap capacitor and Zener diode provided to prevent the IPM module from over-voltage input. The microcontroller (MCU) or motion-controller development board connects to this IPM board via the provided 14 Pin header connector. Six low-pass filters are used between the signal input connector and the gate input signal pins of the IC. Short-circuit current protection is provided by a single shunt resistor, op-amp, and low-pass filter. Additional resistor divider circuitry is included to monitor bus voltage, inverter phase current, and module temperature. This board is made for a high voltage motor up to 400V DC. This board can be used to make a VFD driver with help of an embedded system or microcontroller board which generates 6 PWM signals and take care of over current, fault, Bus Voltage feedback signals. IC MCP6021 op-amp used as current to voltage converter, LMV7235 comparator provides Fault/Over current output.
Safety precautions Warning
Features
- Supply Up To 400V DC
- Gate Driver Supply 15V DC
- Current Feedback Output 200mV/1Amp
- Fault Output Normally High, Goes low at Over Current set point
- Trimmer Potentiometer PR1 to set the overcurrent/Fault output
Inputs/Outputs 14 Pin Header Connector
- PIN1: 15V DC Supply for a gate driver
- PIN 2: GND
- PIN3: Fault output Normally High, goes low when a fault occurs
- PIN4: Current feedback output 200mV/1A
- PIN5: GND
- PIN6: PWM 1 High In
- PIN7: PWM 2 High In
- PIN8: PWM 3 High In
- PIN9: PWM 1 Low In
- PIN10: PWM 2 Low In
- PIN11: PWM 3 Low In
- PIN 12: ITRP (Over Temperature Output)
- PIN 13: VBS ( DC Bus Voltage FeedBack ) Output
- PIN 14: 5V DC Output
Schematic
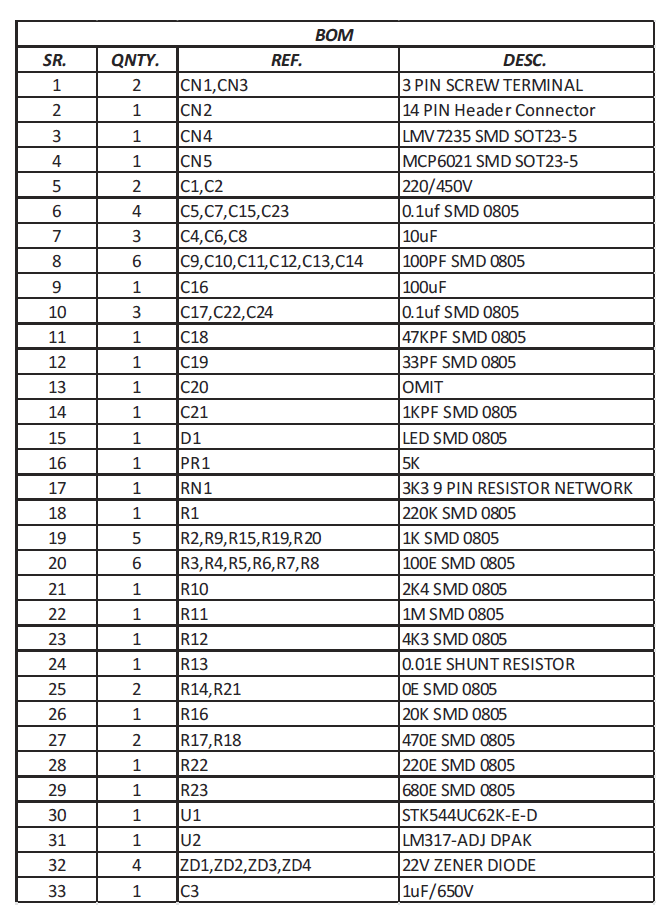
Parts List
Thermistor Characteristics
Photos

STK544UC62K Datasheet
PCB




")


Is this board for sale?
We can supply any of the projects published on our website if minimum order quantity is 20 pieces. Shipping 45 USD by UPS. Delivery Time 2-4 Weeks
First of all, I congratulate you on your work. I need one module for my academic work. If I can get the result I expected, I will need more modules. I will be very happy if you contact me to get your sample module on this subject. Yours sincerely.
dear WANT TO PURCHASE this module plz tell me price nad shipping in pskistan
https://www.electronics-lab.com/project/10a-400v-dc-intelligent-power-module-ipm/
please guide me how can i place my order , i am from pakistan
How many pieces do you need? We can produce this on order.
1st i need 2 sample pieces , kindly tell me to procedure of this
my address , Plot 77/78, I-9/2 street 10, sector I-9, Islamabad Pakistan
I am retired scientist (glaciologist). I am not practicing electronics, just have basic understanding of how some of circuits are working. It looks like described IPM is suitable for my application – ultralight ice drilling system. I need variable, reversible DC output from the IPM. Please, let me contact Rajkumar Sharma for help to develop second part of the IPM – actual switch board.
Hi,
Please contact me at raj@twovolt.com
please tell me the price
la tierra de alimentación y la tierra de control van conectadas?
are the power ground and the control ground connected?
Yes power ground and control ground connected.
I’m looking for this exact controller but can it be built with higher then 20khz?
Sorry, this is designed to work up to 20Khz, I don’t think it can work at a higher frequency.
Hello, how many volts is the minimum starting voltage of this board?
Could you please the the IPM datasheet for this info?