TMC429 Triple-Axis High-End Motion Controller with SPI Interface
This TMC429 Breakout Board is a versatile motion control solution that enables users to create sophisticated three-axis motion control systems. This board interfaces with the TMC429 chip through SPI communication and provides 3-axis step/direction output signals along with limit switch inputs.
This TMC429 Breakout Board is a versatile motion control solution that enables users to create sophisticated three-axis motion control systems. This board interfaces with the TMC429 chip through SPI communication and provides 3-axis step/direction output signals along with limit switch inputs.
The TMC429 chip serves as a dedicated triple-axis motion controller, making it ideal for laboratory automation, 3D printing, scanning equipment, and various automated applications. It functions as a trapezoidal ramp generator, allowing for smooth acceleration and deceleration profiles. The board operates within a voltage range of 3.3V to 5V, offering flexibility for different system requirements. Using Trinamic Step/Dir drivers, up to 256 micro step resolution realize highly precise motion. Based on target positions and velocities – which can be altered on the fly – it performs all real time critical tasks autonomously. The TMC429 offers high level control functions for robust and reliable operation. Two separate 4 wire serial peripheral interfaces allow for communication with the microcontroller and with up to three daisy chained stepper motor drivers.
Features
- TMC429 Trinamic triple-axis dedicated step and direction motion controller
- Supply voltage 3.3V or 5V
- Power LED 3V and 5V
- Configuration and control via SPI
- 3xdedicated Step and Direction output
- Upto32MHzinput frequency
- Upto1MHzstepoutput frequency
- Allows step / direction signal extraction from TMC429 output data stream
- Programmable pulse shaping for step / direction interface
- 24-bit integrated position resolution
- Programmable presale for Incremental Encoder Interface
- 4-times evaluation of encoder signals
- Fast 32-bit SPITM interface
- Can share SPITM interface with TMC429 and supplies separate interrupt output
- Integrates Reference Switch Multiplexers
- Controls up to three stepper motors
- 3 V or 5 V operation with CMOS / TTL compatible IOs
- Serial 4-wire interface for µC with easy-to-use protocol
- Interface for SPI™ motor drivers with data rates up to 1 Mbit/s
- Step/Direction interface to control any Step-Dir driver
- Clock frequency: up to 32 MHz (can use CPU clock)
- Internal position counters 24 bit wide
- Read-out option for all motion parameters
- Programmable 6-bit micro step table for SPI drivers
- Ramp generators for autonomous positioning / speed control
- On-the-fly change of target motion parameters
- Homing and Stop Switch Monitoring integrated for 1-3 switches
- Power boost automatic acceleration dependent current control
- Low power operation: 1.25 mA at 4 MHz (typ.)
- PCB Dimensions 28.58 x 36.20 mm
Ramp Parameter Setup for TMC429
The target motion velocity is the basic setting for a motion controller. Its choice depends on the application, the motor type, and its load. The choice of micro step resolution additionally influences the required pulse frequencies for a certain RPM velocity. The basic TMC429 velocity parameter is V_MAX. It provides a 12-bit resolution. In order to cover a wider range, an additional parameter PULSE_DIV works as electronic gear shifting. It provides 14 gears by setting a value between 0 and 13. Each increment of PULSE_DIV halves the effective velocity. This way an overall velocity range corresponding to a 26-bit setting is achieved. The gear shifting parameter PULSE_DIV normally remains stable within an application or at least within each motion ramp.
More Info: https://www.analog.com/en/resources/app-notes/an-029.html
Extending the Positioning Range of the TMC429 (or TMC428) to 32-bit or more
The TMC429 and the TMC428 have 24-bit registers for position information. These are the registers X_TARGET and X_ACTUAL available for each of the three motor drivers. When doing a positioning movement, the motion direction is determined by the sign of the 24-bit difference between both values. This way, the maximum displacement per move is (223)−1, i.e. 8388607.
The algorithm for position extension requires two additional registers within the microcontroller: A 32-bit target position (XTARGET32) and a 32-bit actual position (XACTUAL32).
More Info: AN-012: Extending the Positioning Range of the TMC429 (or TMC428) to 32-bit or more | Analog Devices
TMC429 & TMC26x Getting Started: Motion Control via Step/Direction
For explaining how to initialize a TMC429 together with a TMC26x the step Rocker module TMCM-1110 is used as actual example. Csource code examples are freely available for this module for practical tests (www.analog.com).
More Info: https://www.analog.com/en/resources/app-notes/an-016.html
A Tool for Calculating the Motion Parameters Used with TMC429 Based Modules
Many ADI Trinamic stepper motor control modules are equipped with a powerful hardware motion controller chip: the TMC428 or the TMC429. All ADI Trinamic modules use TMCL, the ADI Trinamic Motion Control Language as interface to the user. TMCL provides easy access to all TMC429 motion parameters, but does not do any conversion between the internal units of the motion controller and real-world units. For this purpose, a Parameter Conversion Tool is provided, which will be explained in detail in this application note.
More Info: https://www.analog.com/en/resources/app-notes/an-024.html
Arduino Library
- https://www.arduinolibraries.info/libraries/tmc429
- https://github.com/analogdevicesinc/TMCL-LITE-1110/blob/master/TMC429.h
- https://docs.arduino.cc/libraries/tmc429/
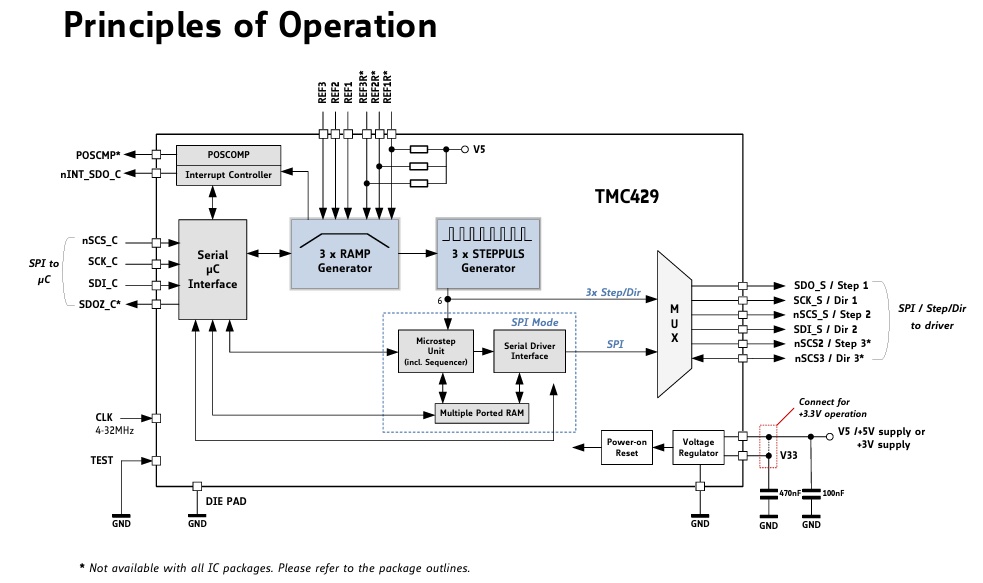
The TMC429 scores with its autonomous handling of all real time critical tasks. By offloading the motion-control function to the TMC429, up to three motors can be operated reliably with very little demand for service from the microcontroller. Software only needs to send target positions, and the TMC429 generates precisely timed step pulses by hardware for up to three stepper motor driver chips. Parameters for each motor can be changed on the fly while software retains full control using an SPI bus. This way, high precision and reliable operation is achieved while costs are kept down.
Serial µC Interface
From the software point of view, the TMC429 provides a set of registers, accessed by a microcontroller via a serial interface in a uniform way. Each datagram contains address bits, a read writes selection bit, and data bits to access the registers and the on-chip memory. Each time the microcontroller sends a datagram to the TMC429 it simultaneously receives a datagram from the TMC429. This simplifies the communication with the TMC429 and makes programming easy. Most microcontrollers have an SPI hardware interface, which directly connects to the serial four wire microcontroller interface of the TMC429. For microcontrollers without SPI hardware software doing the serial communication is sufficient and can easily be implemented.
Step/Dir Driver Interface
The TMC429-LI controls the motor position by sending pulses on the STEP signal while indicating the direction on the DIR signal. A programmable step pulse length and step frequencies up to 1MHz allow operation at high speed and high microstep resolution. The driver chip converts these signals into the coil currents which control the position of the motor. The TMC429-LI perfectly fits to the TMC26x smart power Step/Dir driver family.
Serial Driver Interface
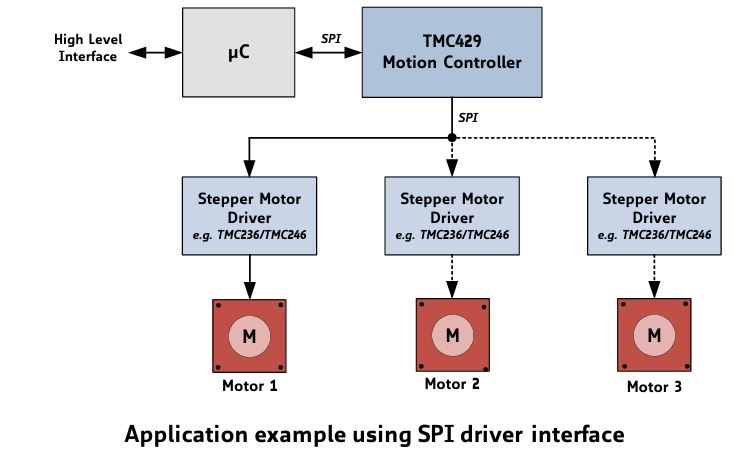
The TMC429 automatically generates the required data-stream for SPI drivers and provides user configurable microstep waves and motor ramps for up to three motors. The serial interface to the motor drivers is flexibly configurable for different types (from different vendors) with up to 64-bit length for the SPI daisy chain. The TMC429-I perfectly fits to the TMC24x driver family.
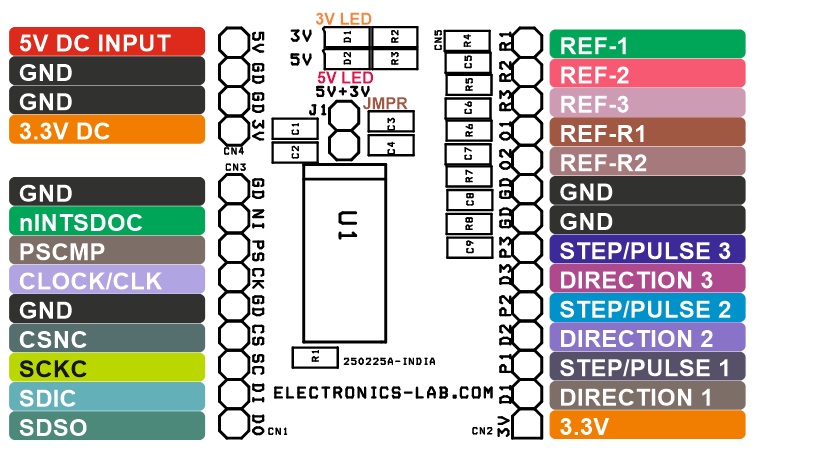
Connections
- CN1 Microcontroller SPI Interface: Pin 1 = SDOC, Pin 2 = SDIC, Pin 3 = SCKC, Pin 4 = CSNC, Pin 5 = GND
- CN2 Step/Dir Output: Pin 1 = 3.3V, Pin 2 = Direction 1, Pin 3 = Step 1, Pin 4 = Direction 2, Pin 5 = Step 2, Pin 6 = Direction 3, Pin 7 = Step 3, Pin 8 = GND
- CN3: Pin1 = CLK, Pin 2 = PSCMP, Pin 3 = nINTSDOC, Pin 4 = GND
- CN4: Pin 1 = 5V DC, Pin 2 = GND, Pin 3 = GND, Pin 4 = 3.3V
- CN5: Pin1 = Reference 1, Pin 2 = Reference 2, Pin 3 = Reference 3, Pin 4 = Reference R1, Pin 5 = Reference R2, Pin 6 = GND
- Jumper J1 = 3.3V+5V
- D1: 3.3V LED
- D2: 5V LED
CN2 Step/Direction vs SPI
- SDO_S / Step 1, SCK_S / Dir 1, nSCS_S / Step 2, SDI_S / Dir 2, nSCS2 / Step 3*, nSCS3 / Dir 3*
Schematic
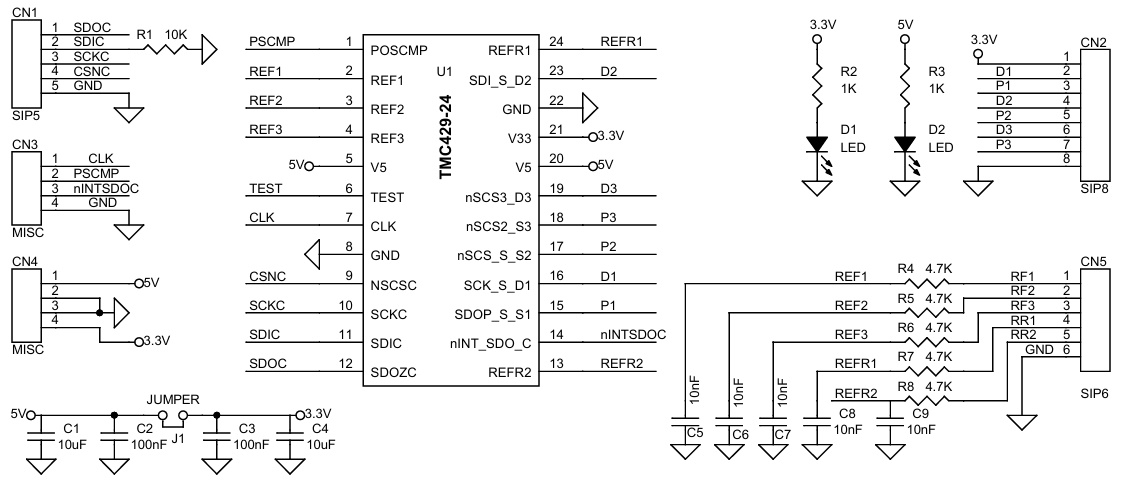
Parts List
| NO. | QNTY. | REF. | MESC. | MANUFACTURER | SUPPLIER | SUPPLIER PART NO |
|---|---|---|---|---|---|---|
| 1 | 1 | CN1 | 5 PIN MALE HEADER PITCH 2.54MM | WURTH | DIGIKEY | 732-5318-ND |
| 2 | 1 | CN2 | 8 PIN MALE HEADER PITCH 2.54MM | WURTH | DIGIKEY | 732-5321-ND |
| 3 | 2 | CN3,CN4 | 4 PIN MALE HEADER PITCH 2.54MM | WURTH | DIGIKEY | 732-5317-ND |
| 4 | 1 | CN5 | 6 PIN MALE HEADER PITCH 2.54MM | WURTH | DIGIKEY | 732-5319-ND |
| 5 | 2 | C1,C4 | 10uF/16V CERAMIC SMD SIZE 0805 | YAGEO/MURATA | DIGIKEY | |
| 6 | 2 | C2,C3 | 100nF/50V CERAMIC SMD SIZE 0805 | YAGEO/MURATA | DIGIKEY | |
| 7 | 5 | C5,C6,C7,C8,C9 | 10nF/50V CERAMIC SMD SIZE 0805 | YAGEO/MURATA | DIGIKEY | |
| 8 | 2 | D1,D2 | LED RED SMD SIZE 0805 | OSRAM | DIGIKEY | 475-1278-1-ND |
| 9 | 1 | J1 | 2 PIN MALE HEADER | WURTH | DIGIKEY | 732-5315-ND |
| 10 | 1 | R1 | 10K 5% SMD SIZE 0805 | YAGEO/MURATA | DIGIKEY | |
| 11 | 2 | R2,R3 | 1K 5% SMD SIZE 0805 | YAGEO/MURATA | DIGIKEY | |
| 12 | 5 | R4,R5,R6,R7,R8 | 4.7K 5% SMD SIZE 0805 | YAGEO/MURATA | DIGIKEY | |
| 13 | 1 | U1 | TMC429-24 | ANALOG DEVICE | DIGIKEY | 175-TMC429-PI24-ND |
| 14 | 1 | SHUNT | SHUNT FOR JUMPER J1 | SULLINS CONNECTORS | DIGIKEY | S9001-ND |
Connections
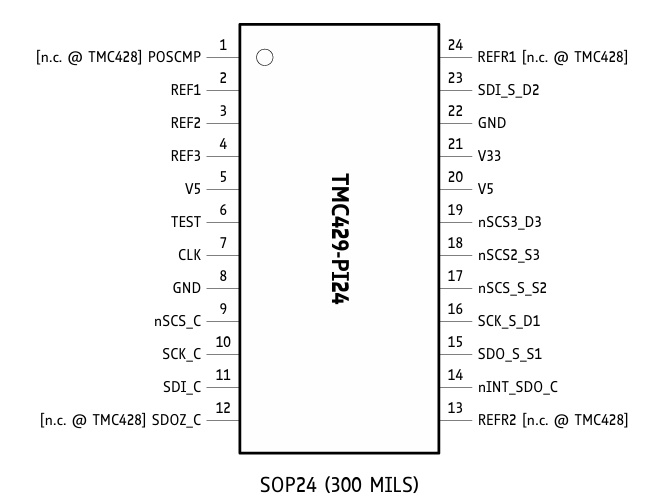
TMC429 Pinout
Block Diagram

Example Application

Principles of Operation

Gerber View
Photos