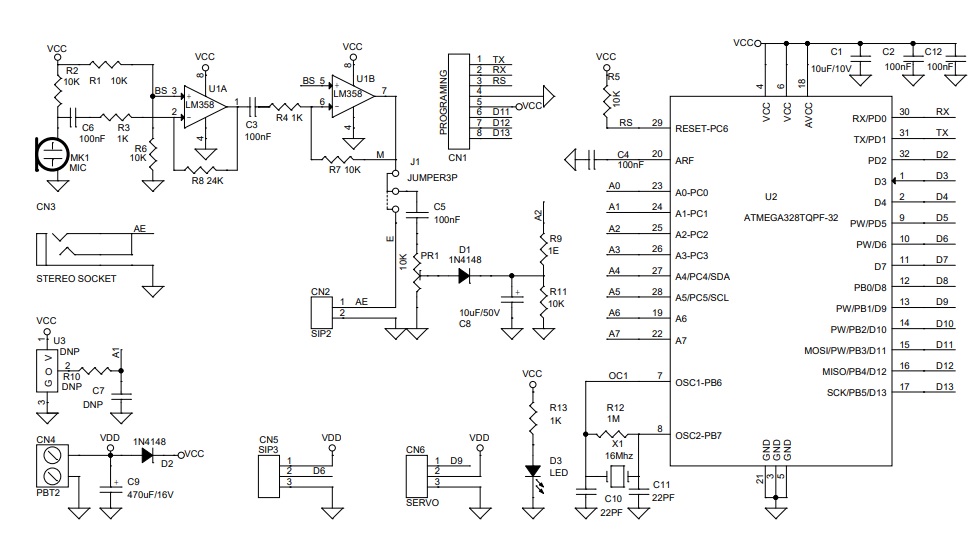
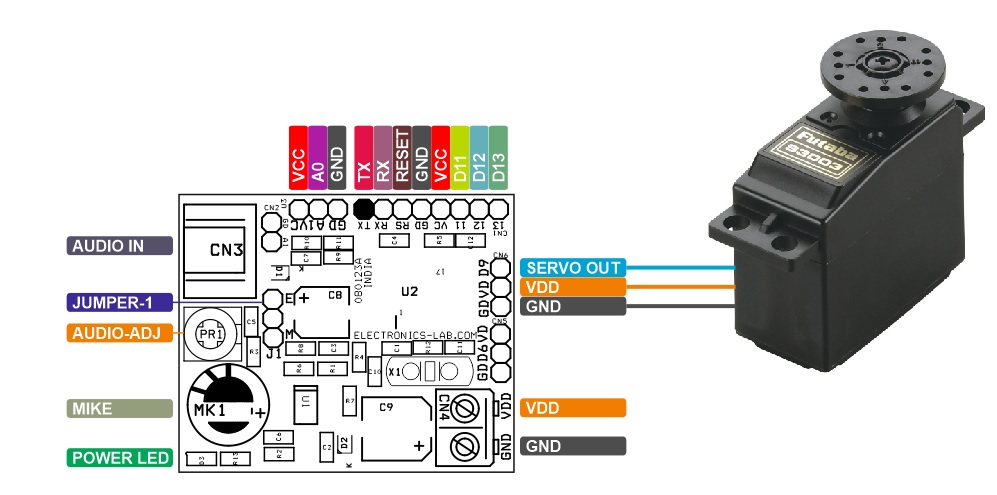
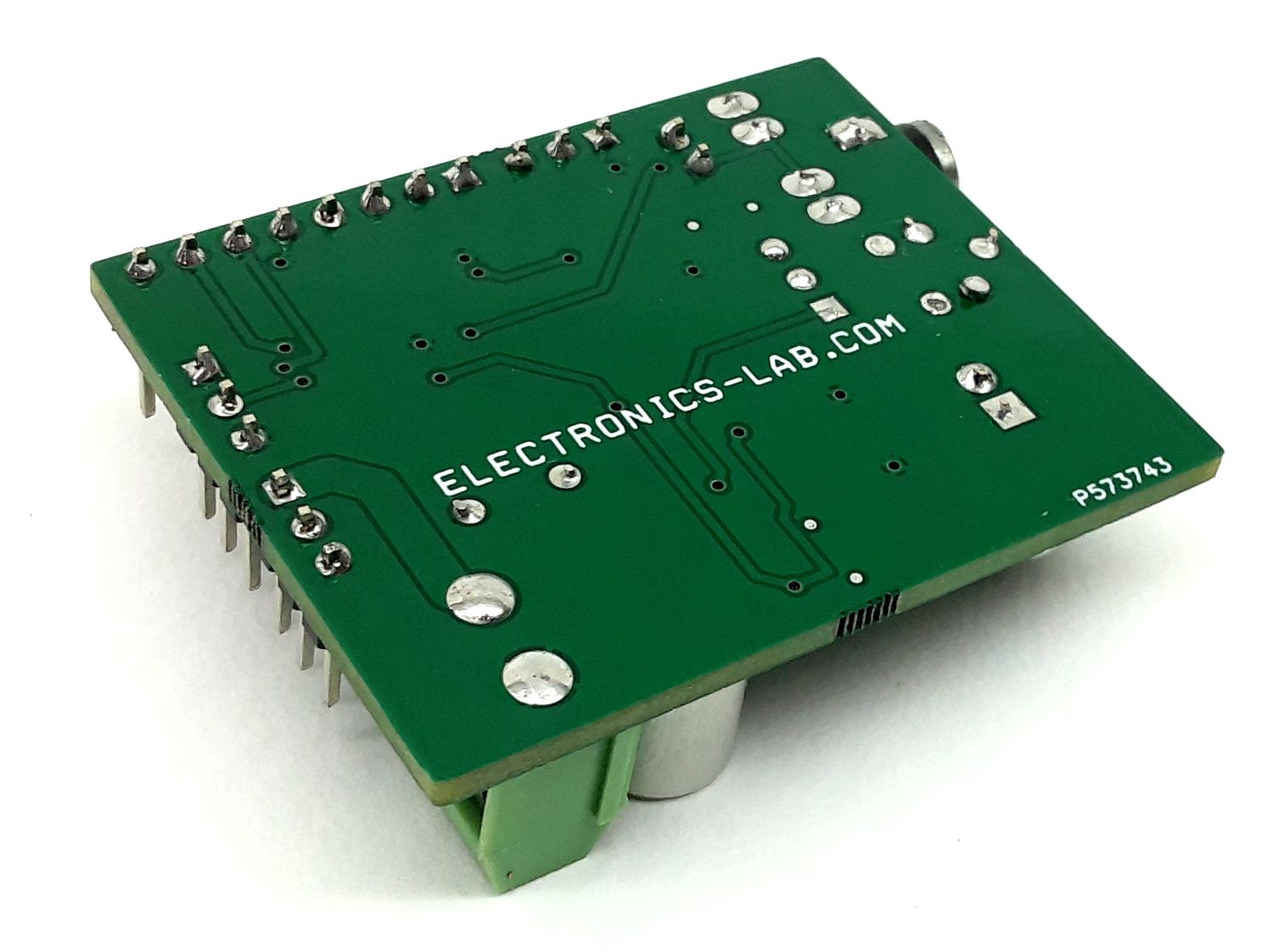
The project presented here is made for applications such as Animatronics, Puppeteer, sound-responsive toys, and robotics. The board is Arduino compatible and consists of LM358 OPAMP, ATMEGA328 microcontroller, microphone, and a few other components. The project moves the RC servo once receives any kind of sound. The rotation angle depends on the sound level, the higher the sound level the biggest the movement, in other words, the movement of the servo is proportional to the sound level. The microphone picks up the soundwave and converts it to an electrical signal, this signal is amplified by LM358 op-amp-based dual-stage amplifier, D1 helps to rectify the sinewave into DC, and C8 works as a filter capacitor that smooths the DC voltage. ATmega328 microcontroller converts this DC voltage into a suitable RC PWM signal.
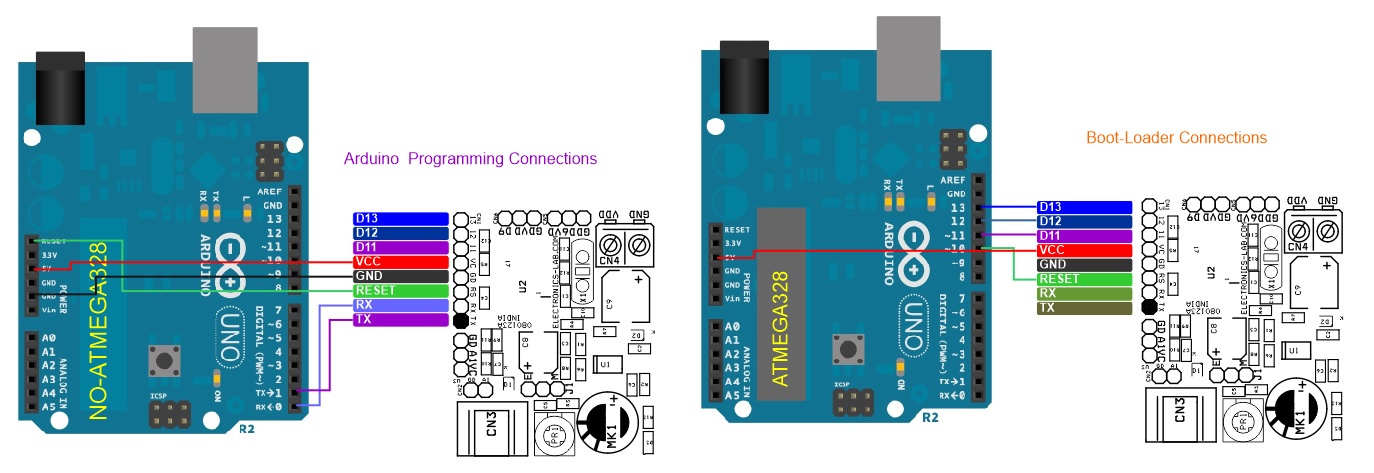
The project is Arduino compatible and an onboard connector is provided for the boot-loader and Arduino IDE programming. Arduino code is available as a download, and Atmega328 chips need to be programmed with a bootloader before uploading the code. Users may modify the code as per requirement. More information on burning the bootloader is here: https://www.arduino.cc/en/Tutorial/BuiltInExamples/ArduinoToBreadboard
Direct Audio Input: The audio input signal should not exceed 5V, It is important to maintain the input audio signal at this maximum level, otherwise it can damage the ADC of ATMEGA328.
Features
Supply 5V to 6V DC (Battery Power Advisable)
RC Servo Movement 180 Degrees with Loud sound
Direct Sound Input Facility Using 3.5MM RC Jack
On Board Jumper Selection for Micro-Phone Audio or External Audio Signal
On Board Trimmer Potentiometer to Adjust the Signal Sensitivity
Flexible Operation, Parameters Can be Changed using Arduino Code
/*
Controlling a servo position using a potentiometer (variable resistor)
by Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
modified on 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Knob
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
int potpin = A2; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup() {
myservo.attach(6); // attaches the servo on pin 6 to the servo object
}
void loop() {
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 60)
val = map(val, 0, 60, 0, 180); // scale it for use with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}
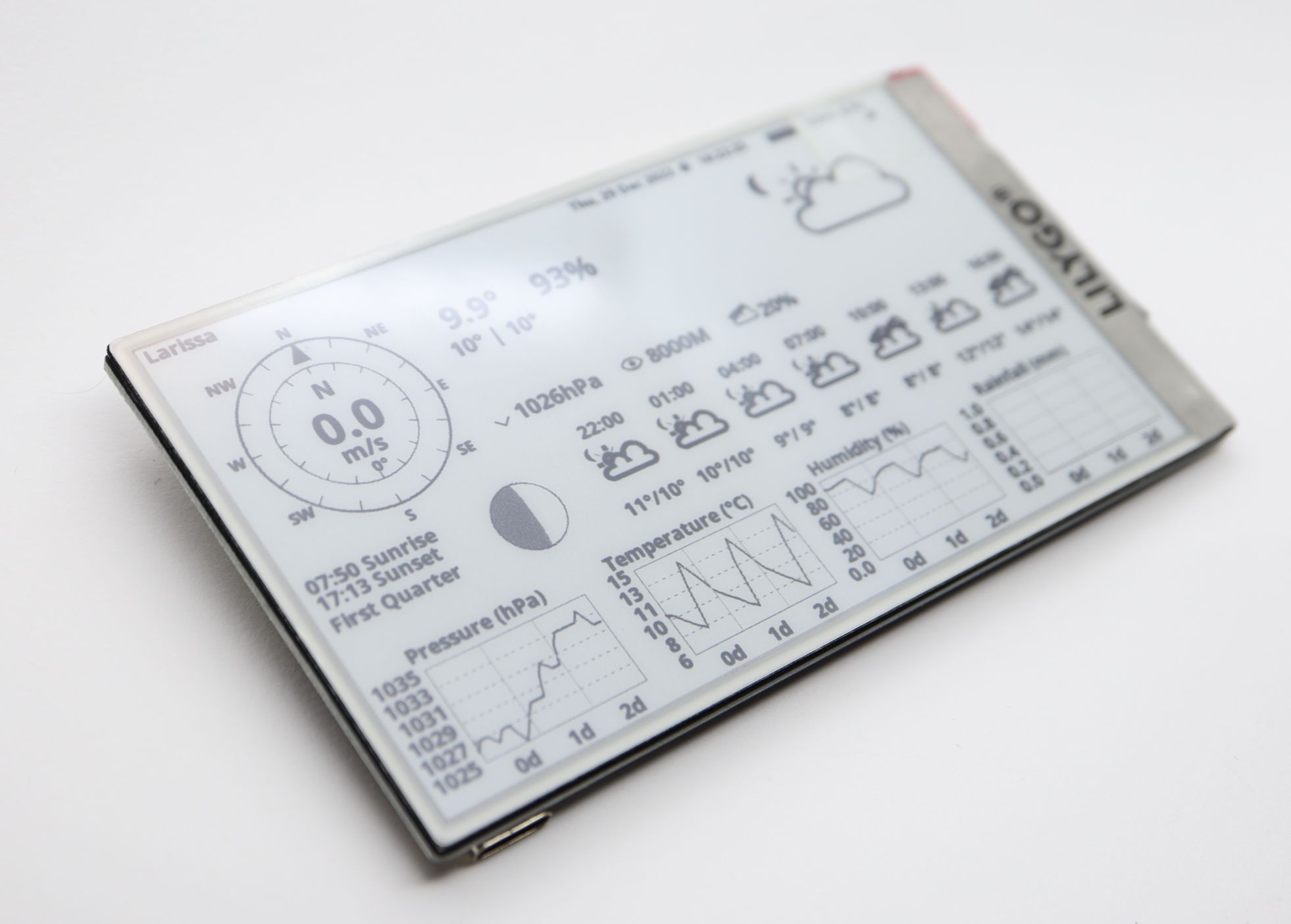
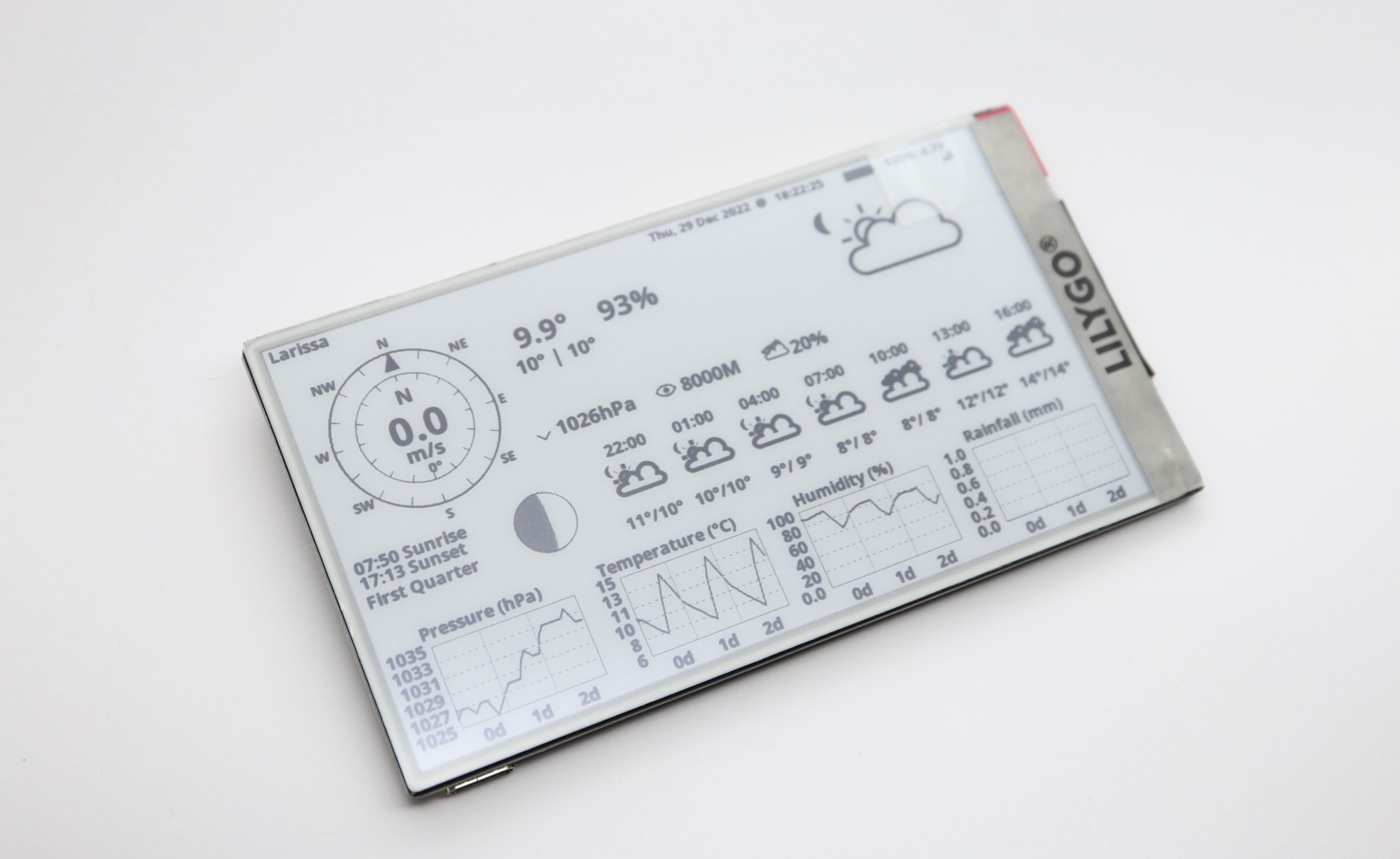
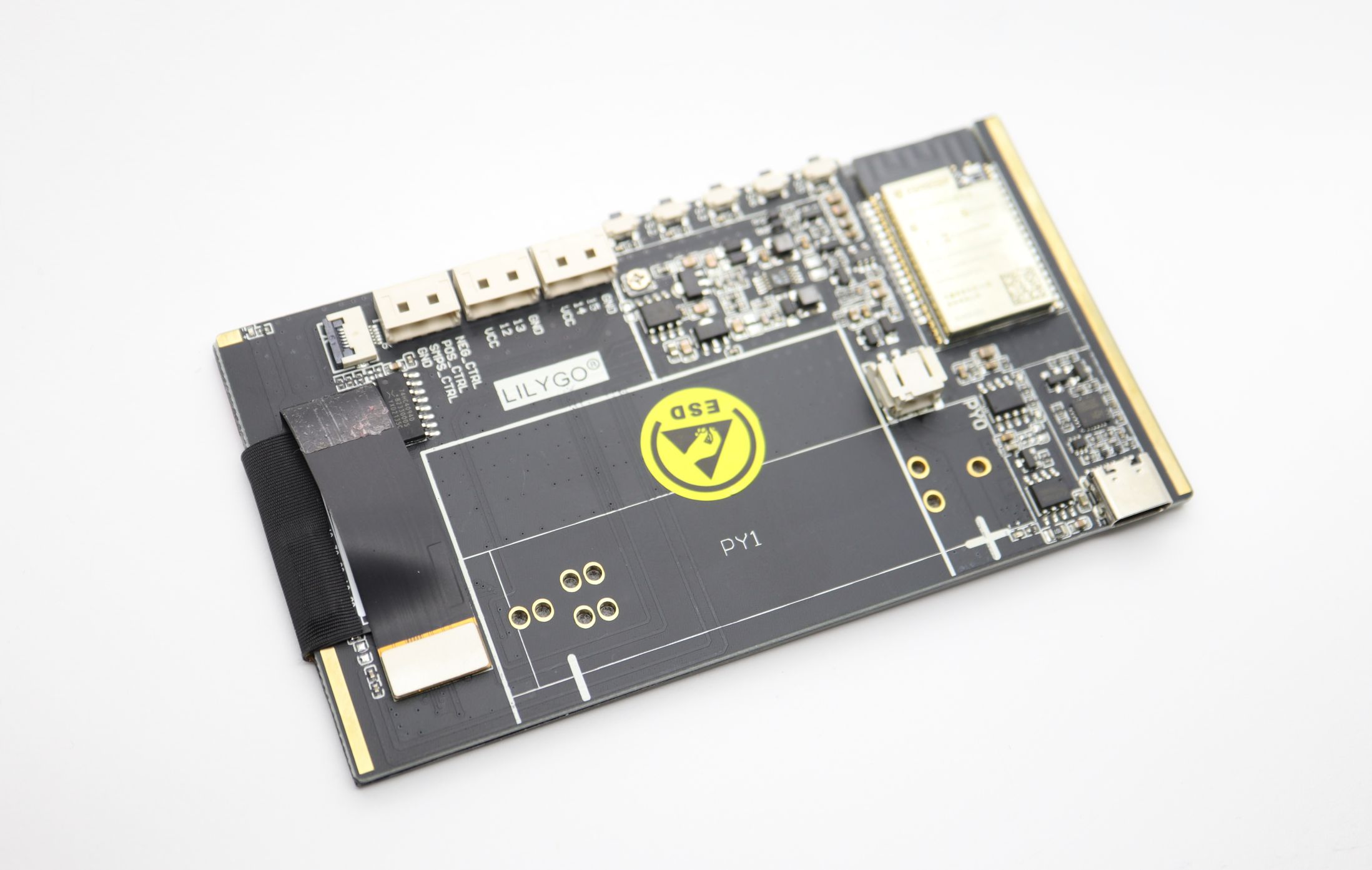
The LILYGO T5 4.7 inchE-Paper ESP32 Development Board is an exciting 4.7″ e-paper display integrated with an ESP32 WiFi/Bluetooth module. The board’s processor is ESP32-WROVER-E with 16MB of FLASH memory and 8MB of PSRAM. The ESP32 module supports Wi-Fi 802.11 b/g/n and Bluetooth V4.2+BLE and can easily be programmed with Arduino IDE, VS Code, or ESP-IDF. The board can be purchased on Alliexpress for 38.33 EUR + shipping or Tindie for 28.13 + shipping. This display is ideal for building a weather station that will fetch weather data from OpenWeatherMap via simple API usage. So in this tutorial, we will follow the steps to make a weather station like the photo above. We will work on a Windows PC to program the display, but the same can be done in Linux or Mac OS.
Specifications
MCU: ESP32-WROVER-E (ESP32-D0WDQ6 V3)
FLASH: 16MB
PRAM: 8MB
USB to TTL: CP2104
Connectivity: Wi-Fi 802.11 b/g/n & Bluetooth V4.2+BLE
Onboard functions: Buttons: IO39+IO34+IO35+IO0, Battery Power Detection
Power Supply: 18650 Battery or 3.7V lithium Battery (PH 2.0 pitch)
First of all, we will need to install the USB to Serial (CH343) Drivers if we don’t have this done previously. Depending on your Windows version you will need:
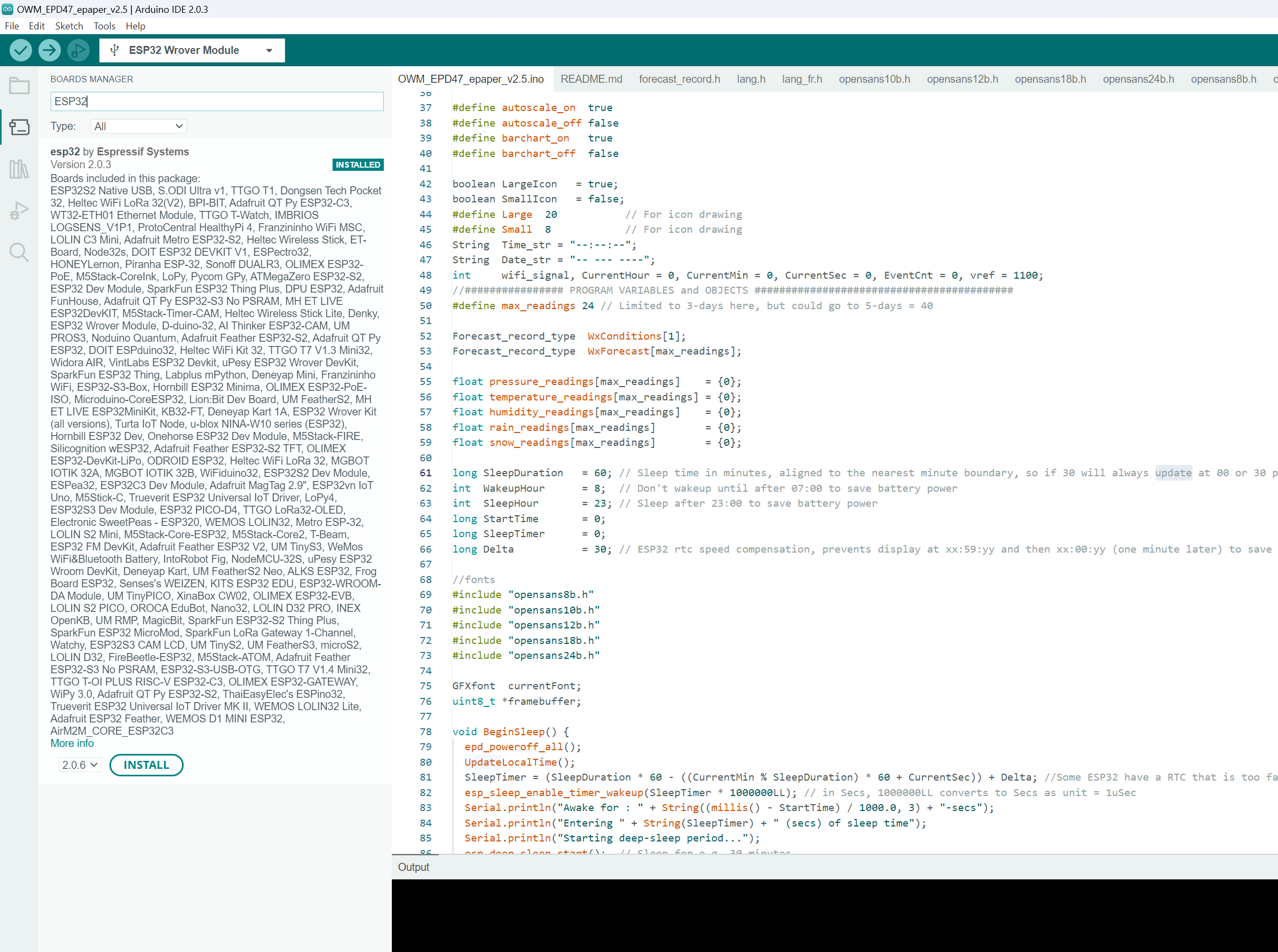
Next click Tools, and select Boards: -> Boards Manager . It will open the left pane with a list of boards. Type ESP32 into the search field. Find ESP32 by Espressif Systems, and click Install.
Preparing the Code
Download LilyGo-EPD47 library to the C:\Users\YOUR_USERNAME\Documents\Arduino\libraries folder on your system:
Download and extract LilyGo-EPD-4-7-OWM-Weather-Display to your directory with Arduino projects. This directory is normally located in C:\Users\YOUR_USERNAME\Documents\Arduino.
The project folder name should match the name of the source code file (OWM_EPD47_epaper_v2.5). This is done to avoid the unnecessary step of moving the files later.
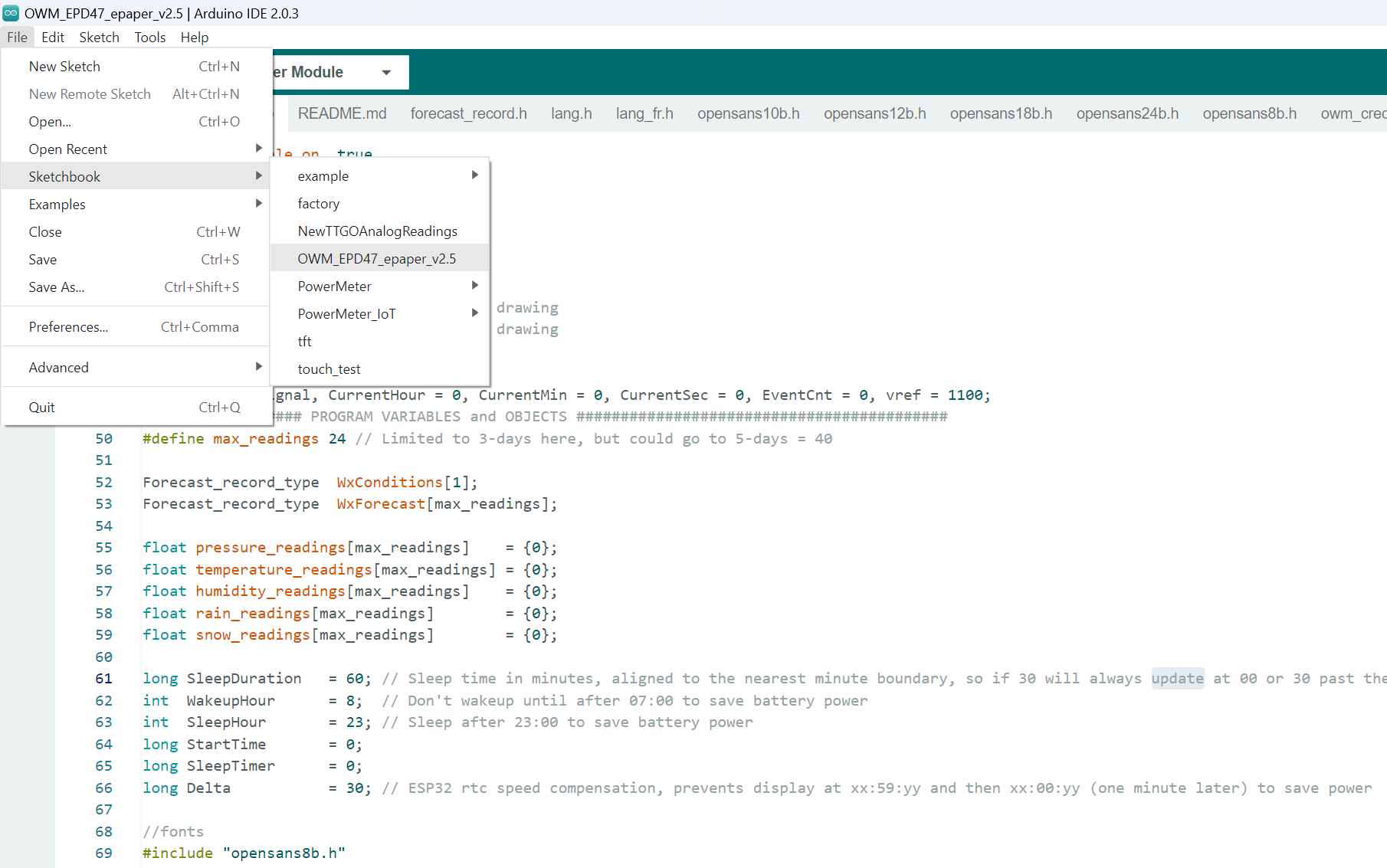
Open Arduino IDE 2.0, click File, -> Sketchbook, -> OWM_EPD47_epaper_v2.5.
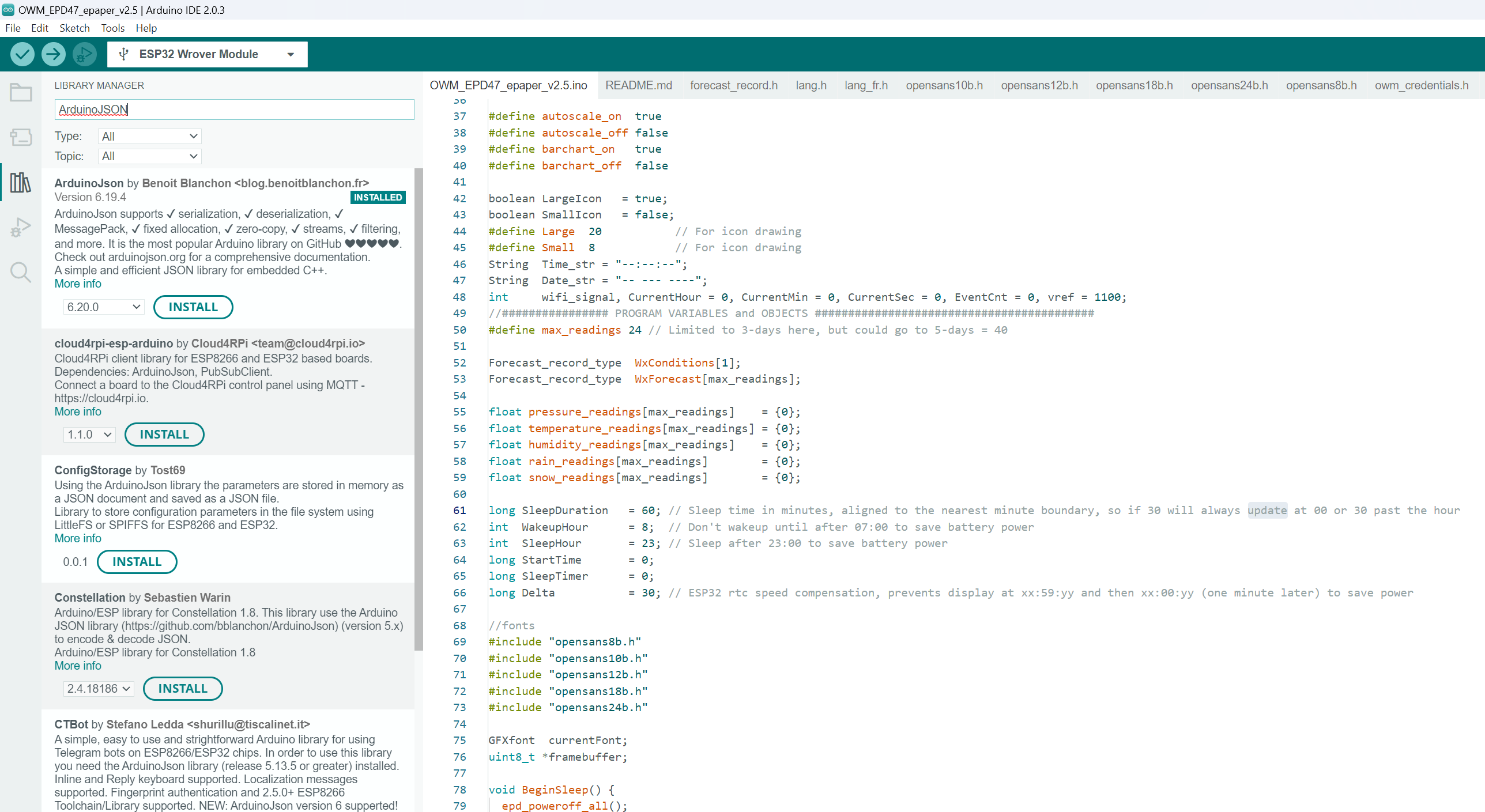
The sketch requires ArduinoJson Library to successfully build.
Click Tools, ->Manage libraries. The pane with Library Manager will open, then type ArduinoJson into the search field. Find ArduinoJson by Benoit Blanchon, click Install.
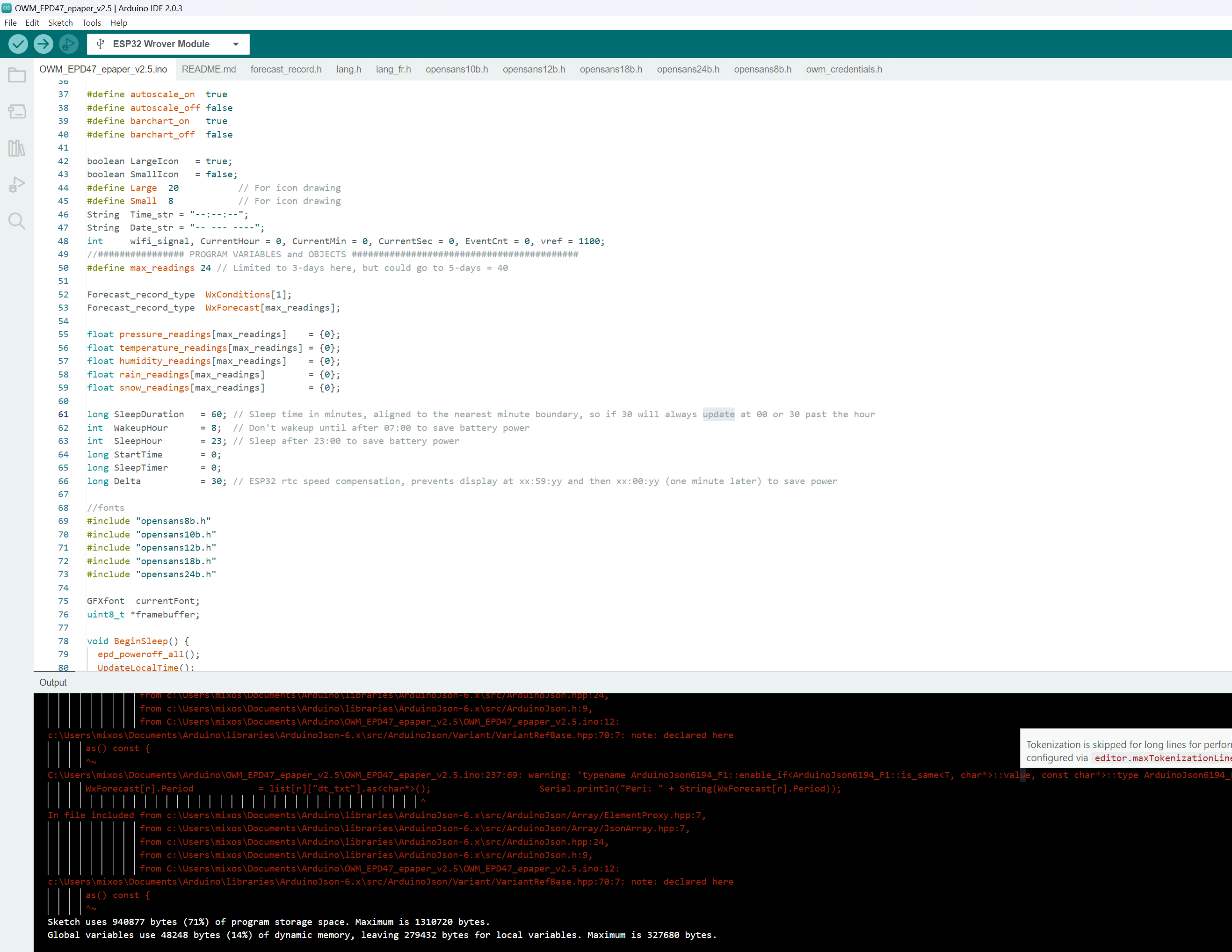
Then click the tick button on the top menu to compile the code. If everything is successful it should show:
Once you verify that the code is compiled you can move on to the next step.
Configuring Parameters
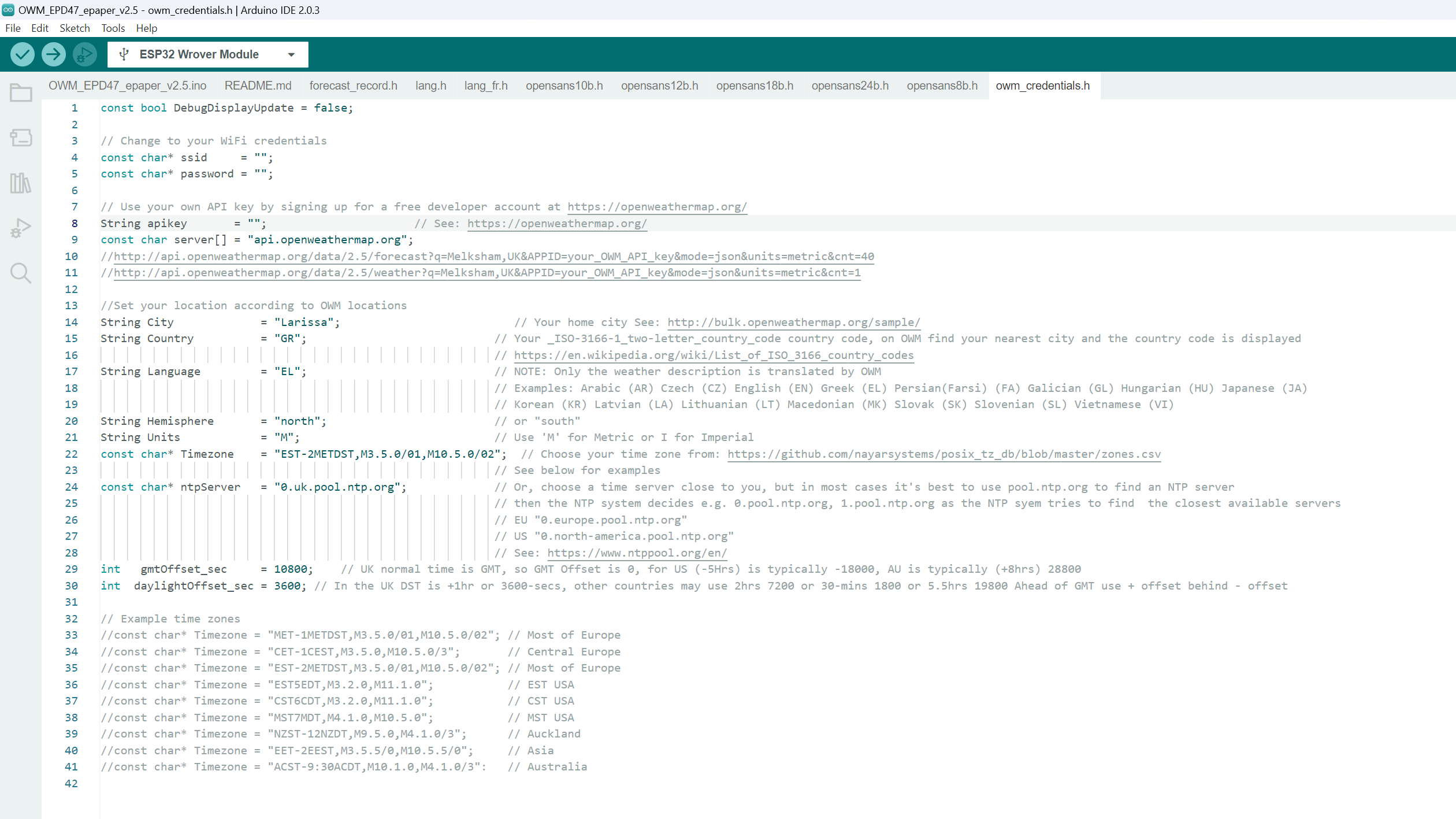
Open the file owm_credentials.h and configure ssid, password, apikey, City, and Country.
The project is fetching data from openweathermap.org so you will need to create a new free account in order to get API key.
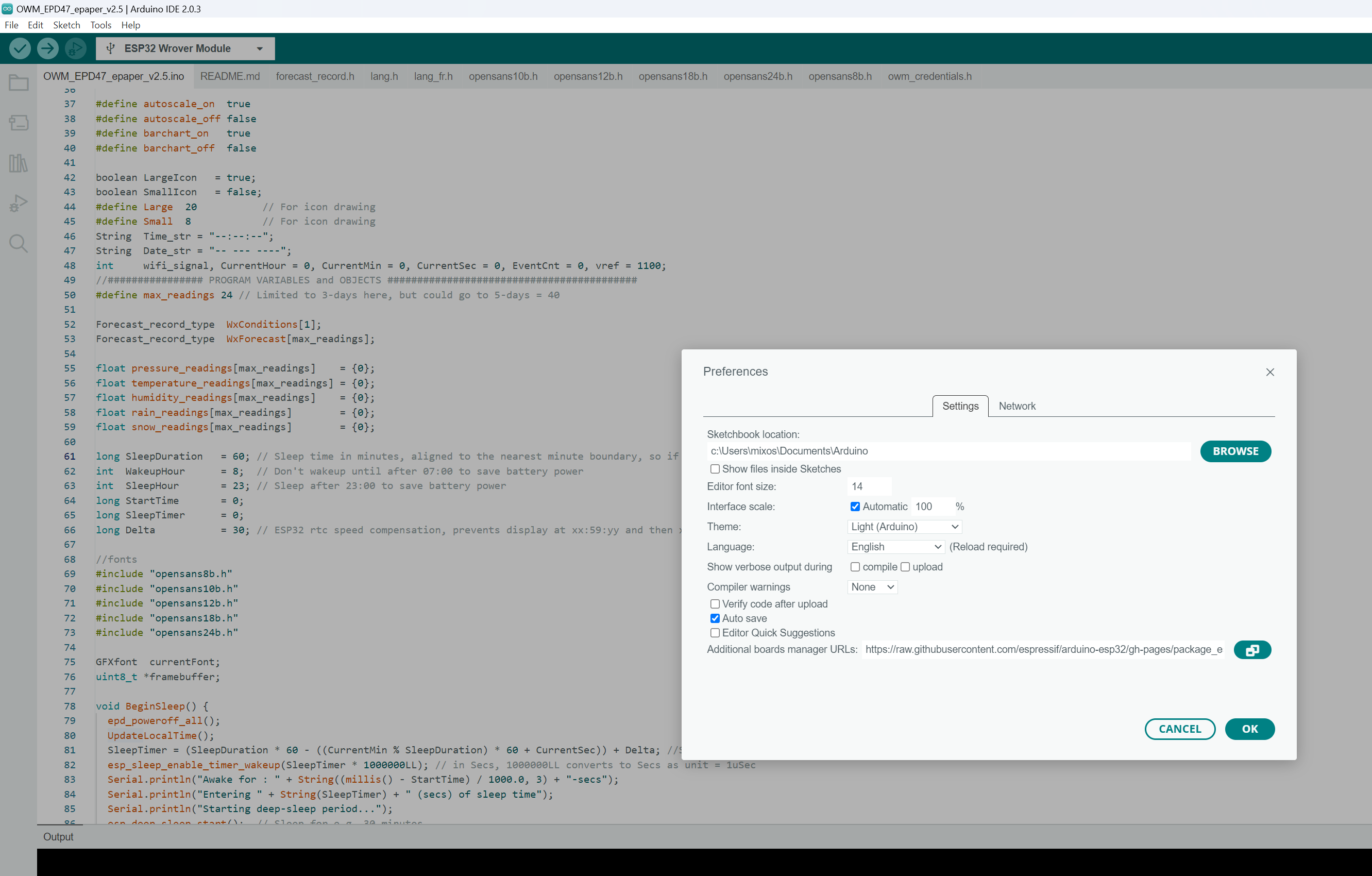
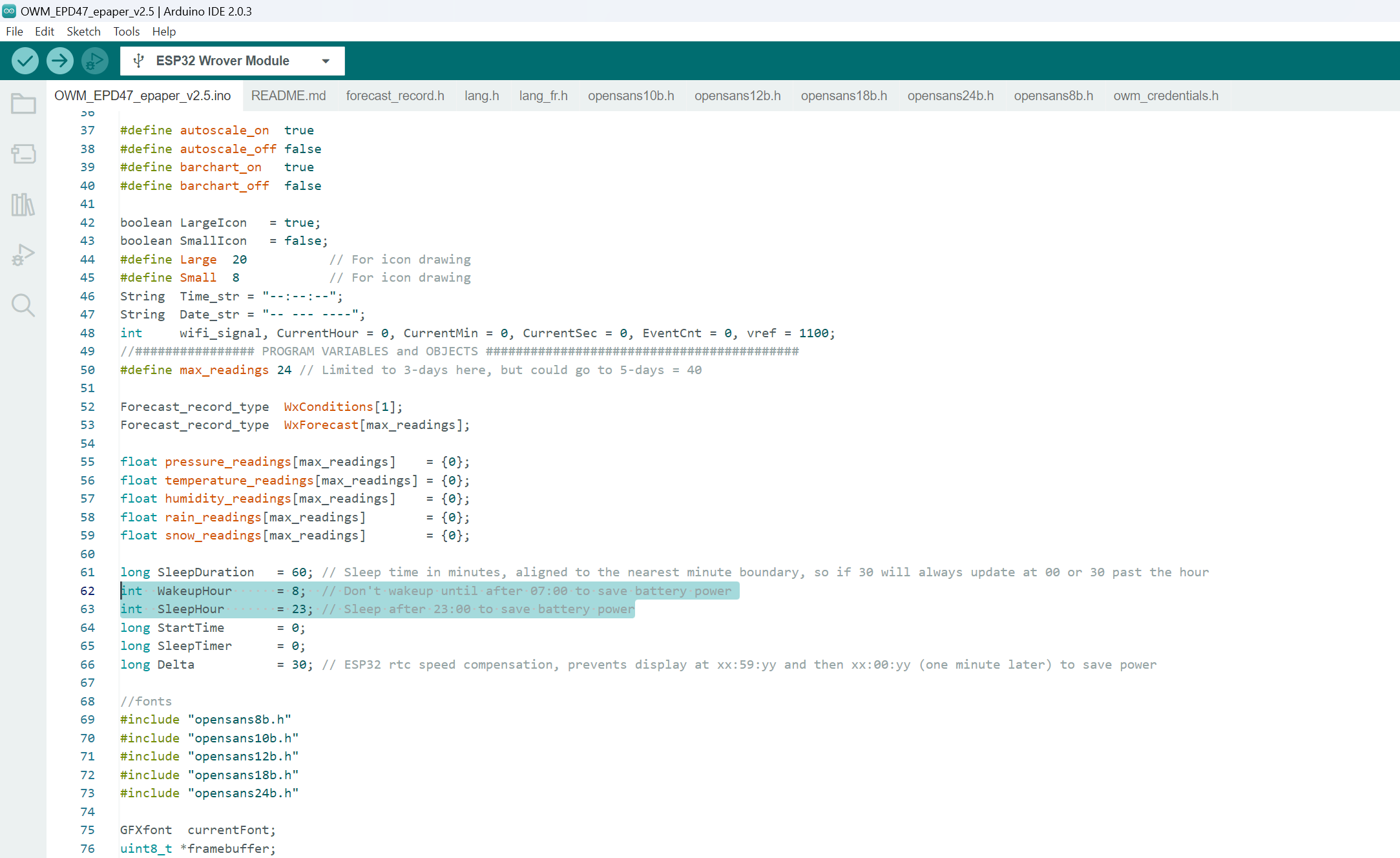
Power Saving
The project code supports power saving, so if you’re flashing in the early before 08.00 or after 23.00, you might notice that nothing appears on the display.
To change the power-saving options open file OWM_EPD47_epaper_v2.5.ino and change WakeupHour and SleepHour to a value that suits your schedule.
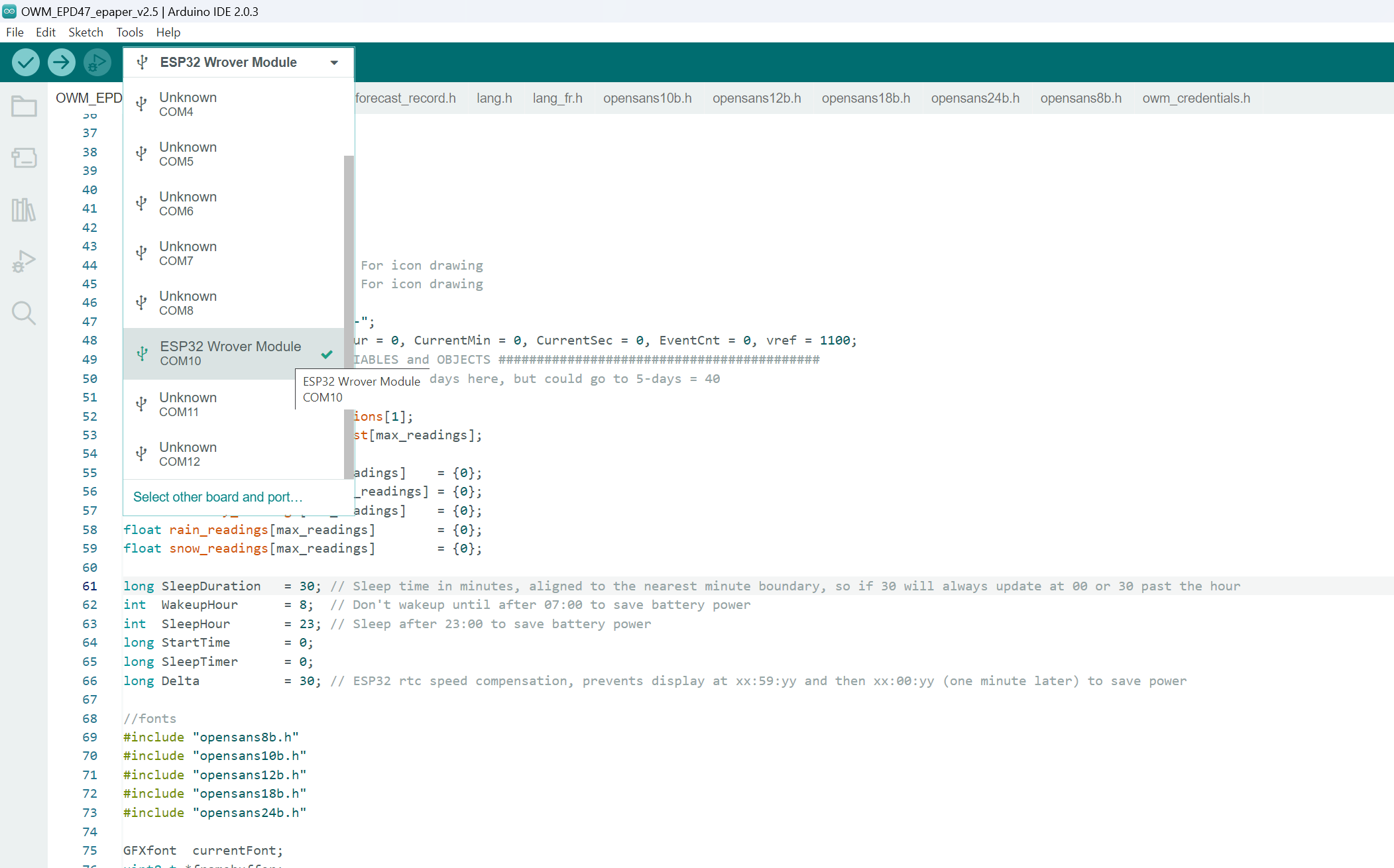
Uploading the Code
Connect the LilyGO T5 4.7-inch e-paper display to your PC-> Select the board from the dropdown in the toolbar. Search for the ESP32 Wrover module and click Ok.
Click the Upload button.
If the flashing is successful, your weather will be displayed on the e-paper like the photos below.
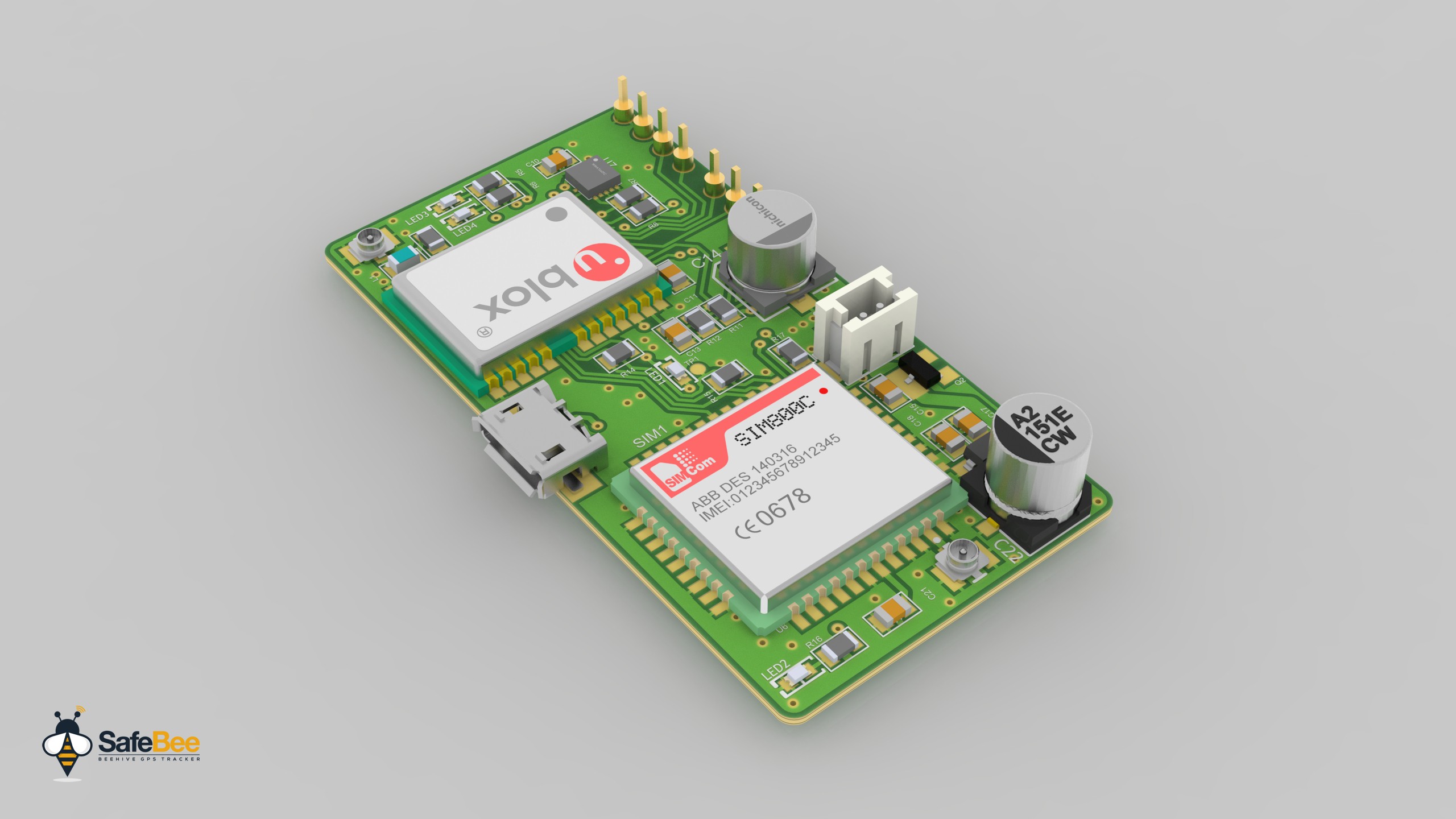
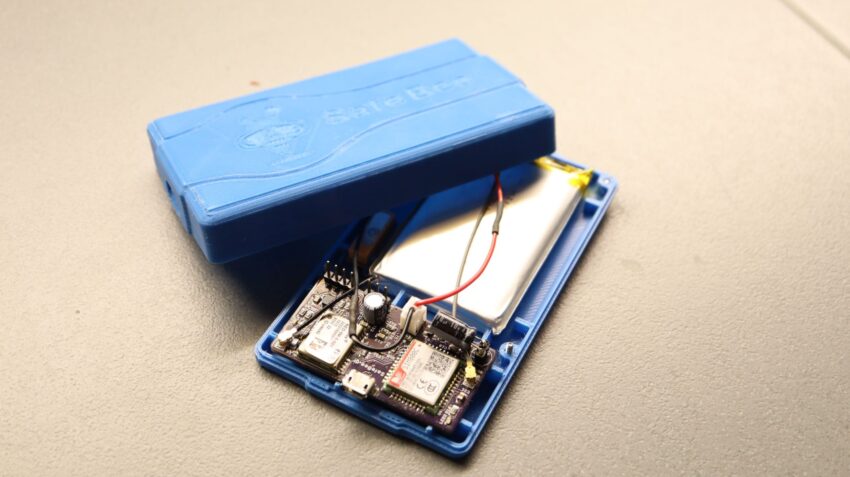
This is an original design of a GPS tracker designed on Elab and it is intended to be used as a security device for beehives, but it is not limited to this. It can be used everywhere a motion-activated GPS tracker is needed, like your car, bike, or even your boat. It is a GPS tracker controlled by simple SMS commands and designed for reliability,low power consumption, and easeof use. It features a MEMS accelerometer that is used to intelligently detect movement and once triggered it will power on the GPS module and will try to acquire the current coordinates. The location details will be transmitted to the owner’s smartphone via a simple SMS and then follow update the coordinates at predefined intervals.
Key Features:
Remote management via simple SMS commands
High reliability – no need to babysit the tracker due to crashes and resets
Long battery life – over 1 year standby on a single charge (2500mAh battery)
3-axis high-sensitivity MEMS Accelerometer
Intelligent Triggering – it will not be triggered by accidental movement
Selectable Trigger Sensitivity Level
Description of Operation
The tracker has 3 main modes of operation, detailed below:
Standby
Ready
Tracking
Standby mode
In standby mode, the GSM and GPS modules are powered down and the microcontroller is in sleep mode, resulting in a current draw of approximately 70uA, mainly by the accelerometer (MMA7660). The accelerometer is used to detect movement caused by a possible thief. If the accelerometer is triggered 1 or 2 or 3 times (depending on the sensitivity level) inside of a 60-second window then the device will enter tracking mode. While in standby mode the tracker will also enter ready mode approximately every 12 hours, triggered by the microcontroller’s internal RTC. This is to check for incoming commands and battery status etc.
Ready mode
The ready mode is entered by the microcontroller’s internal RTC and when the tracker is first powered on. In this mode, the tracker will power up the GSM module and wait for any SMSs to come in and process them. The tracker will stay in ready mode for 5 minutes before returning to standby mode unless an SMS command has instructed the device to enter tracking mode (BEE+TRIGGER).
Tracking mode
Tracking mode is entered when manually instructed to by the BEE+TRIGGER command or after the accelerometer triggers (1 or 2 or 3 movements detect depending on sensitivity level) within a 60-second window, from either standby or ready modes. In tracking mode, the tracker will power up both the GSM and GPS modules and begin to send tracking alert SMSs to the number configured by the BEE+NUMBER command. The device will continue to stay in tracking mode until the BEE+CLEAR command is received or while the accelerometer is detecting movement and/or the GPS module has a lock and the speed is greater than 10KPH. If neither of these conditions is met for 6 minutes then the tracker will send a tracking stopped SMS and return to standby mode, or ready mode if the RTC was triggered within the last 5 minutes.
Power up and Battery Status
In ready and tracking modes if the battery voltage falls below the threshold voltage (3650mV default) then a low battery alert SMS will be sent to the number configured by BEE+NUMBER. Approximately every 30 days (60 RTC triggers) an automated status SMS is also sent to the number configured by BEE+NUMBER.
When power is first applied to the device the tracker will be in ready mode and it will check for incoming SMS and then go to sleep. This is the ideal time to configure the tracker with the BEE+NUMBER number. This is the number that tracking messages, monthly status reports, and low battery alerts will be sent. The phone number is stored in the microcontroller’s FLASH memory and it will be permanently saved, even if battery power is removed. At power-up, the tracker will send a status SMS and also ignore any movement detected by the accelerometer for the first 60 seconds.
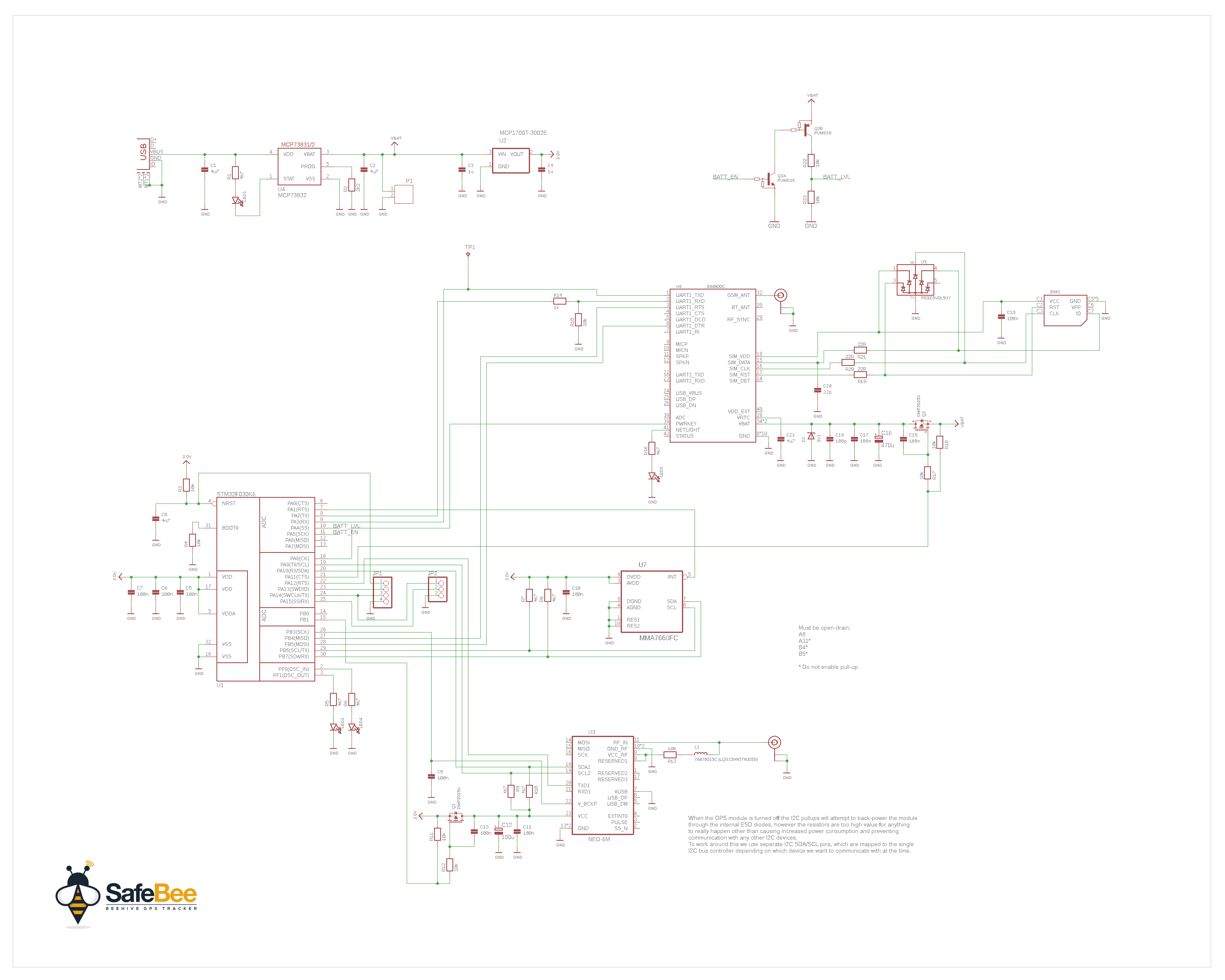
The Hardware
Hover images for details
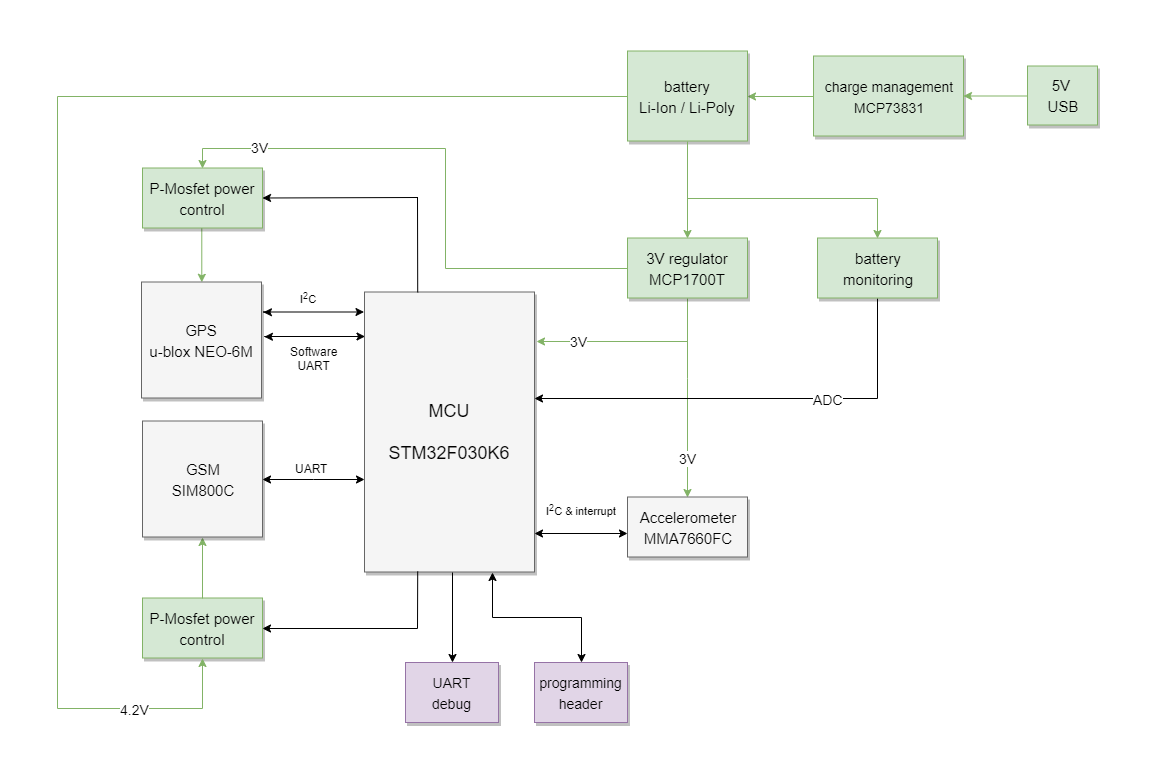
Block Diagram
MCU
STM32F030K6
The tracker uses an ST STM32F030K6 microcontroller (ARM Cortex-M0, 32-bit RISC core), with 32KB of flash, and 4KB of RAM, and operates at up to 48MHz. The STM32F030K6 microcontroller operates in the -40 to +85 °C temperature range from a 2.4 to 3.6V power supply. A comprehensive set of power-saving modes allows the design of low-power applications. Currently, the firmware is taking roughly 24KB of flash (with debugging output enabled) and 1.7KB of RAM. The microcontroller is running at 8MHz and is supplied with 3V.
GSM module
SIMCom SIM800C
The GSM module is a SIMCom SIM800C and uses the UART bus to communicate with the MCU. The GSM module is power-gated with a P-MOSFET, controlled by the MCU, as its own low-power modes are not sufficient for this project. SIM800C supports Quad-band 850/900/1800/1900MHz, it can transmit Voice, SMS and data information with low power consumption. With a tiny size of 17.6*15.7*2.3mm, it can smoothly fit into our small board. The module is controlled via AT commands and has a supply voltage range 3.4 ~ 4.4V.
GPS module
u-blox NEO-6M
The GPS module is a u-blox NEO-6M and uses the I2C bus to communicate with the MCU. There is also a UART connection to the microcontroller as a fallback if the I2C interface does not work (usually the case with Chinese fakes). So, the tracker will work with the original NEO-6M as well as Chinese fake modules. The microcontroller implements the UART interface in software (via timer interrupts), operating at 9600 baud. The GPS module is power-gated with a P-MOSFET, controlled by the MCU, as its own low-power modes are not sufficient. The NEO-6M is powered in the range of 2.7 – 3.6V and has a size of 12.2 x 16 x 2.4mm. More details and design considerations can be found in the Hardware Integration Manual of NEO-6 GPS Modules Series and u-blox 6Receiver Description.
Supported GPS modules:
U-blox NEO-5M
U-blox NEO-6M
U-blox NEO-7M
U-blox NEO-M8N
Various Chinese fakes using AT6558 and similar (if the PCB footprint is the same then it will probably work)
Accelerometer
MMA7660FC
The accelerometer IC is the MMA7660FC and uses the I2C bus to communicate with the MCU. The MMA7660FC is a ±1.5g 3-Axis Accelerometer with Digital Output (I2C). It is a very low power, low profile capacitive MEMS sensor featuring a low pass filter, compensation for 0g offset and gain errors, and conversion to 6-bit digital values at a user-configurable sample per second. In OFF Mode it consumes 0.4 μA, in Standby Mode: 2 μA, in Active mode 47 μA and is powered in the range 2.4 V – 3.6 V. The accelerometer is always active, set up to create an interrupt whenever a shake or orientation change is detected, and is configured with a sampling rate of 8Hz (higher sampling rates improve detection, but also increase power consumption). The interrupt will wake up the microcontroller, where it will run through the main loop. In this loop it checks the interrupt status, and if set it will clear the interrupt and increment a counter at a maximum of once per second. The counter is reset every minute. If the counter reaches 3 the tracker is activated.
Battery Charger
MCP73832
The Li-Ion battery charging IC is MCP73832, which has a user-programmable charge current and the battery charge rate is set to 450mA. It includes an integrated pass transistor, integrated current sensing, and reverse discharge protection. It is usually recommended to charge Lithium batteries at no more than 0.5C, so the recommended minimum battery capacity to use with the tracker is 900mAh.
With a 2500mAh battery, standby current of 70uA, and waking up every 12 hours for 5 minutes with an estimated average current of 15mA the battery life should be approximately 1.5 years. A poor GSM signal can reduce battery life.
Status LEDs
LED
Description
States
LED1
Battery charging state
OFF: Battery not charging (no USB power or battery fully charged) ON: Charging
LED2
GSM state
OFF: GSM is powered off FAST BLINK: GSM is not connected to a network (usually no signal or no SIM) SLOW BLINK: GSM is connected to the network
LED3
MCU Operating mode
OFF: Standby mode ON: Ready or tracking mode
LED4
GPS state
OFF: GPS is powered off FAST BLINK: GPS is acquiring a lock SLOW BLINK: GPS has a lock
SMS Commands
Command
Description
BEE+STATUS
Returns battery voltage - temperature - GSM signal strength - tracking enabled - is tracking - last GPS coordinates -sensitivity level.
BEE+CLEAR
If the tracker has been triggered this will clear it and stop tracking until the next trigger.
BEE+TRIGGER
Manually trigger tracking (will trigger even if disabled with BEE+DISABLE). Tracking will stay enabled until BEE+CLEAR is received.
BEE+ENABLE
Enable tracking triggers
BEE+DISABLE
Disable tracking triggers.
BEE+NUMBER=0123499988
This sets the mobile number to send tracking - low battery warning and monthly status SMSs to. Other command replies are sent to the number that the command was sent from.
BEE+NUMBER=+441234999888
International numbers must start with + then the country code.
BEE+SENSE=1/2/3
This is the sensitivity level - 1 high sensitivity - 2 medium sensitivity - 3 low sensitivity.
LOW BATTERY: (battery voltage)mV (threshold voltage mV)
LOW BATTERY: 3400mV (3650mV)
Programming
The device firmware can be programmed via the SWD interface, which is the 4-pin programming header on the PCB marked RST (reset), SWD (SWDIO), SWC (SWCLK) and GND (ground). An ST-LINK/V2 USB adapter is needed to program the device, which is available from ebay, aliexpress, and other places for less than £3.
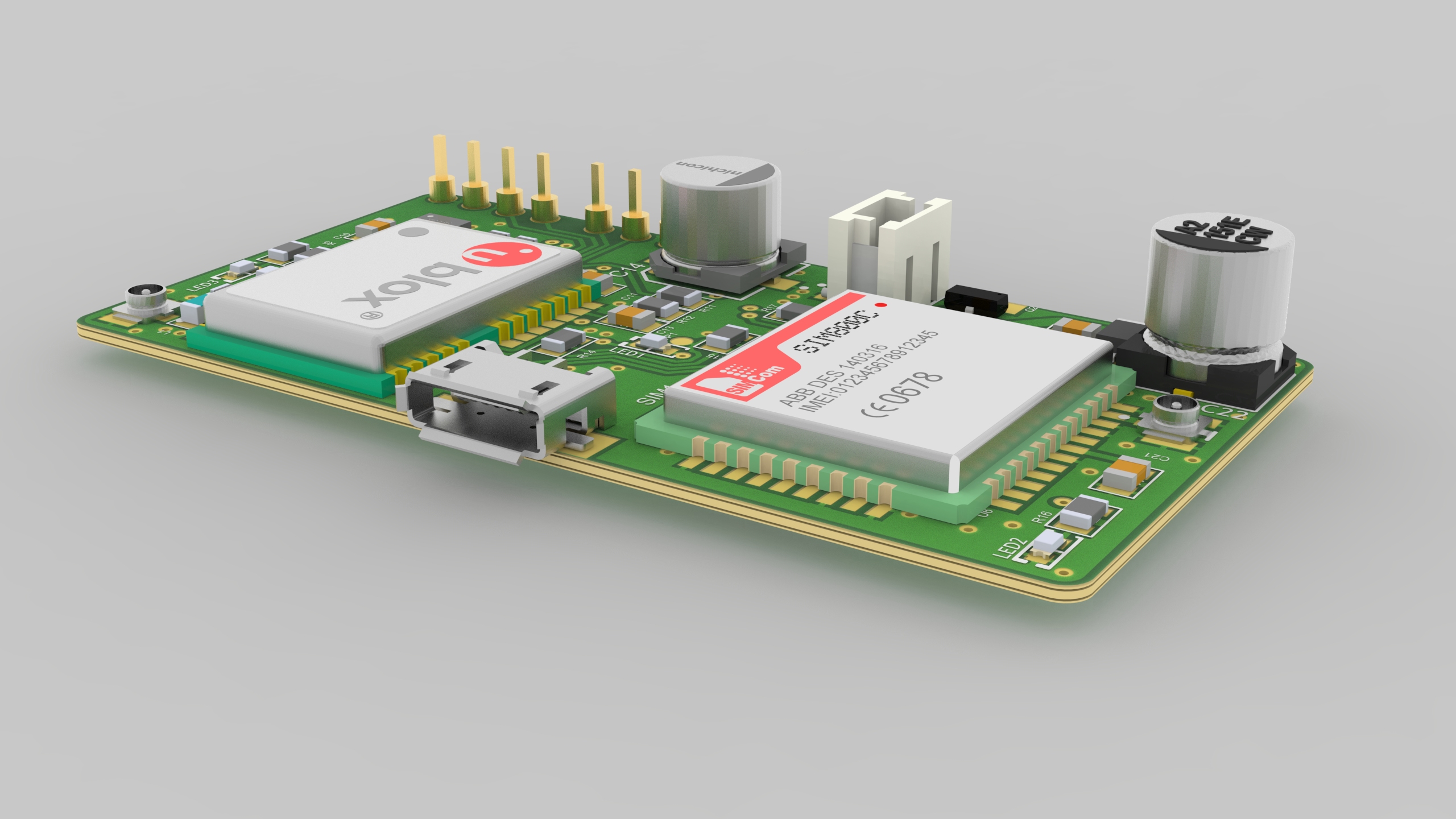
3D Render
3D Render of the board on KeyShot 11 Pro
Debugging
Debugging data is sent out of the UART interface through the TX pin of the debugging header on the PCB, at 115200 baud. This pin is also shared with the SWD interface (SWC). The RX pin is unused but made available for possible use in the future.
Format
(<time>)(<module>)<message>
“time” is in milliseconds and only increments while the microcontroller is not in standby mode. “module” is either “DBG” (general messages), “TRK” (tracker), “GSM”, “GPS”, “SMS”, “MGR” (MGR is the SMS manager which controls when queued SMSs are sent, retried etc.)
A 3D model of the enclosure is designed using Solidworks with overall dimensions of 60 x 20 x 112 mm. The enclosure has two holes, one for the charging micro USB connector and one to fit a mini rocker power switch. The provided design files (download .STEP and .STL files below) can be used to print your own enclosure in your desired color and material. The screws used to secure the enclosure are M3 x 10mm countersunk screws. Design is made by professional engineer janangachandima and you can find his services on the Fiverr page.
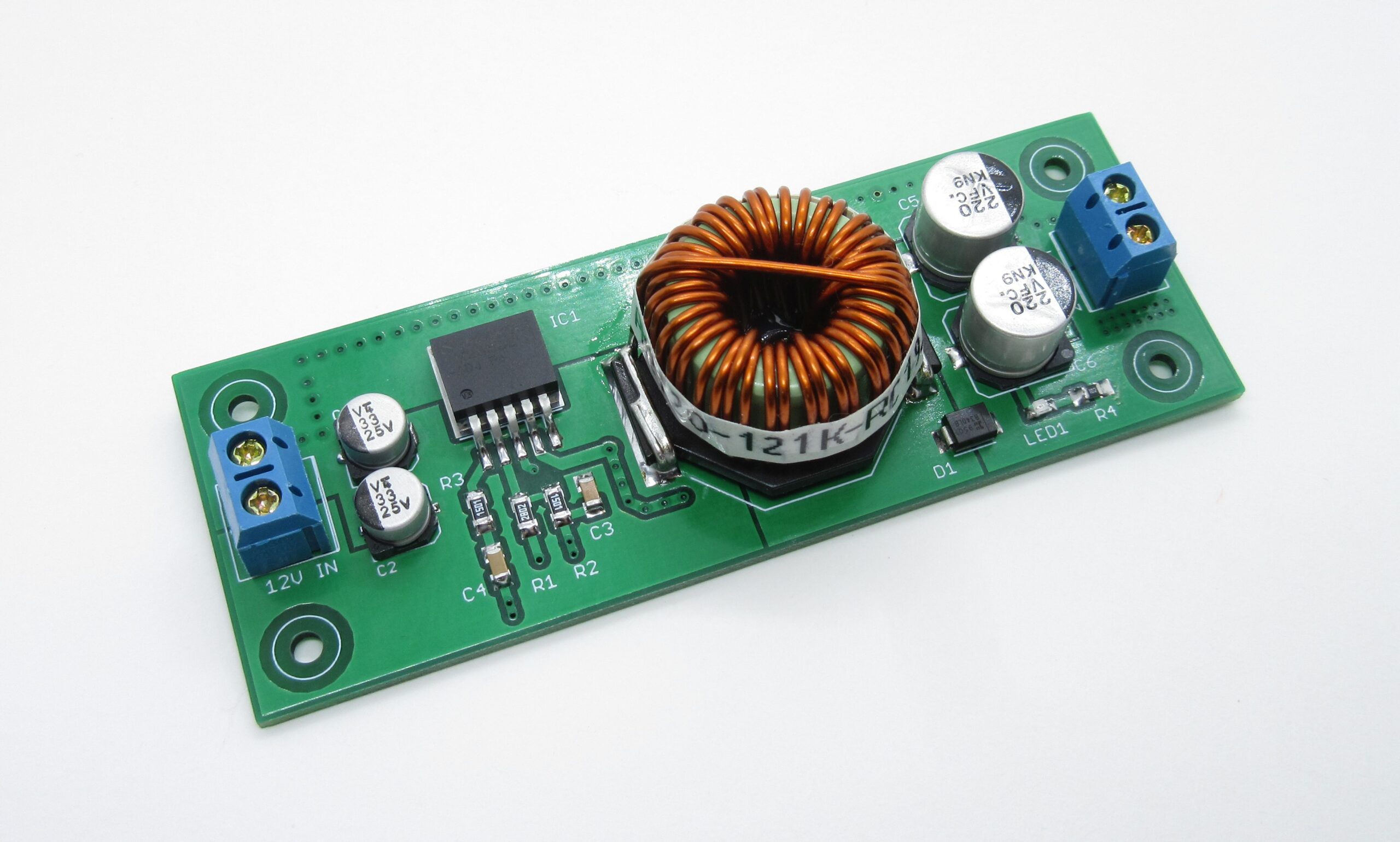
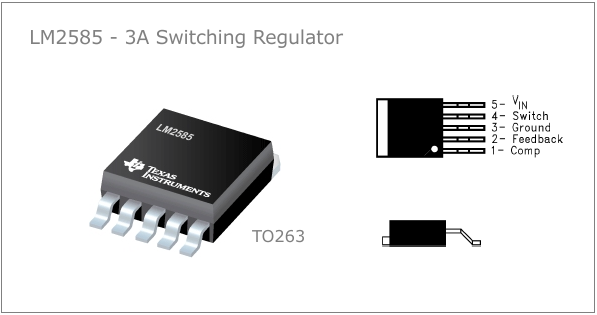
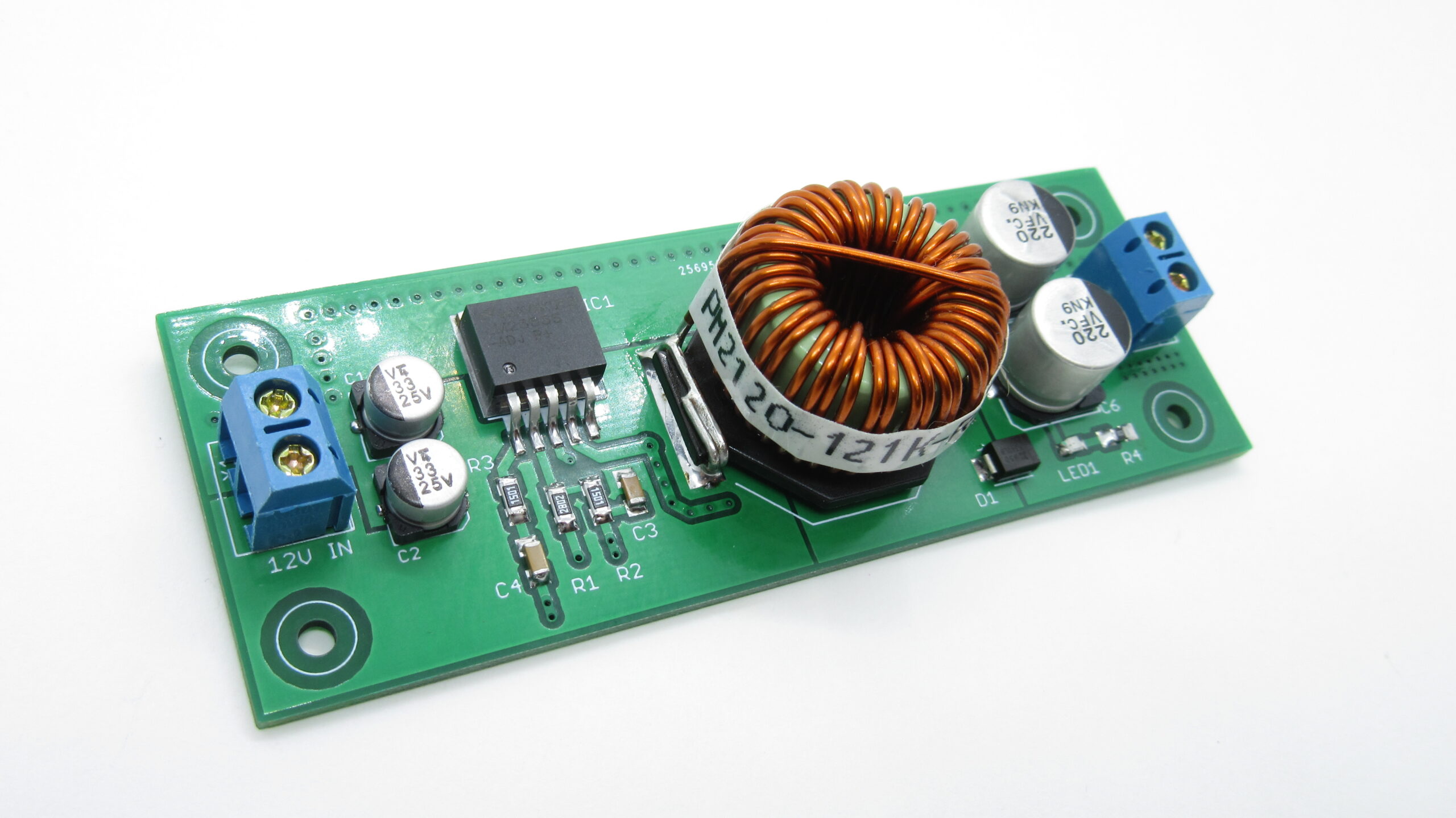
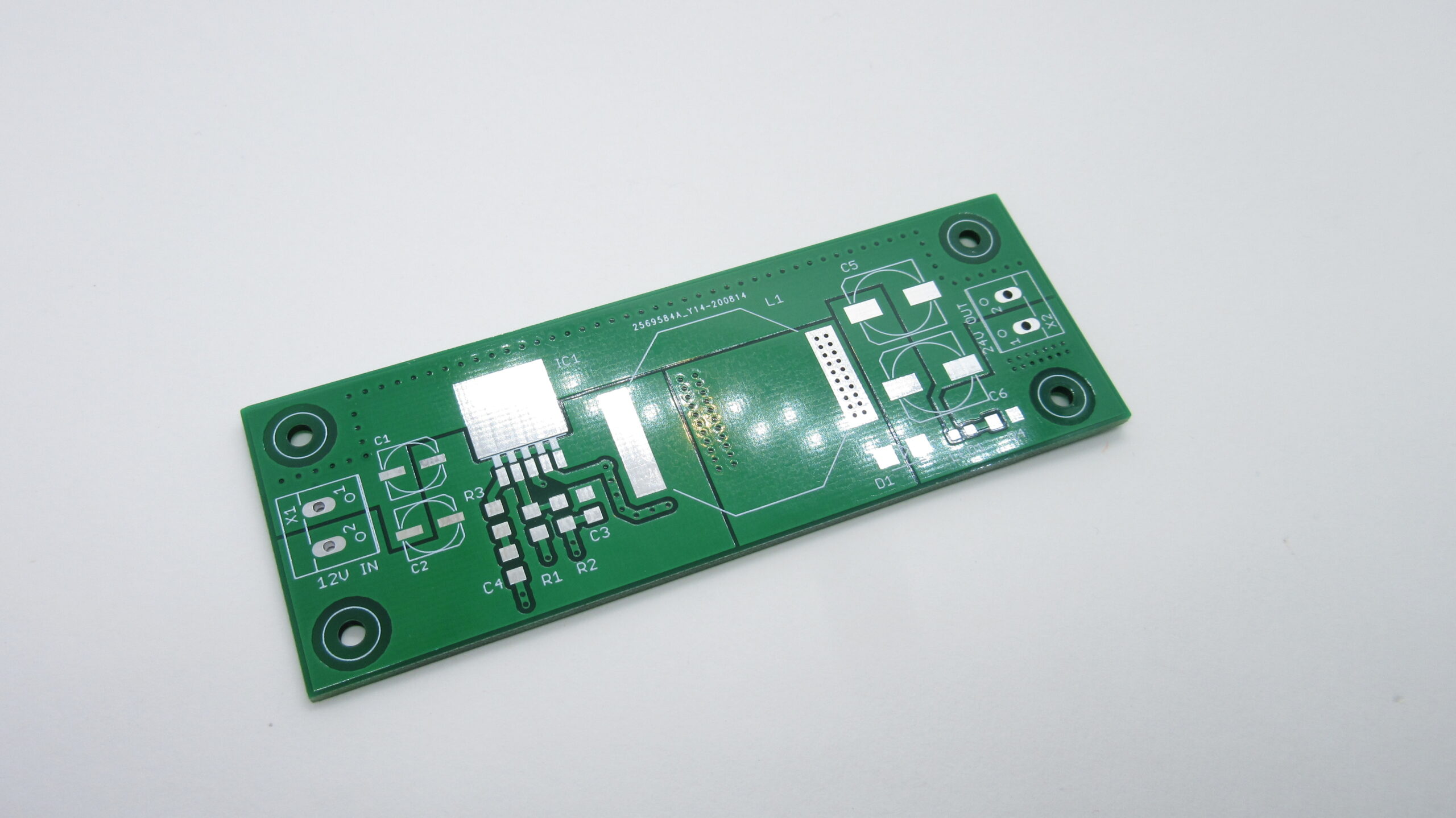
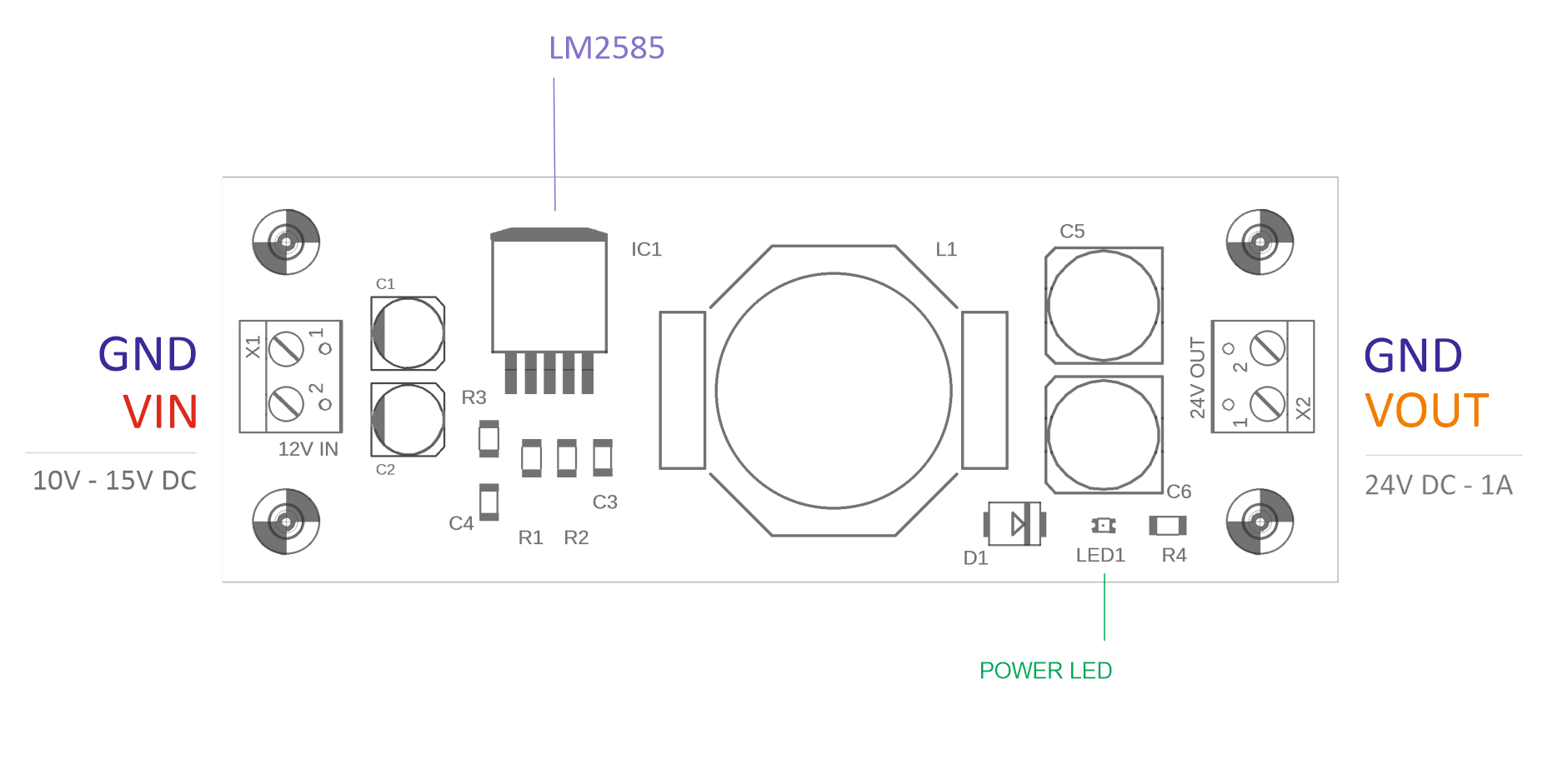
This is a DC-DC step-up converter based on LM2585-ADJ regulator manufactured by Texas Instruments. This IC was chosen for its simplicity of use, requiring minimal external components and for its ability to control the output voltage by defining the feedback resistors (R1,R2). NPN switching/power transistor is integrated inside the regulator and is able to withstand 3A maximum current and 65V maximum voltage. Switching frequency is defined by internal oscillator and it’s fixed at 100KHz.
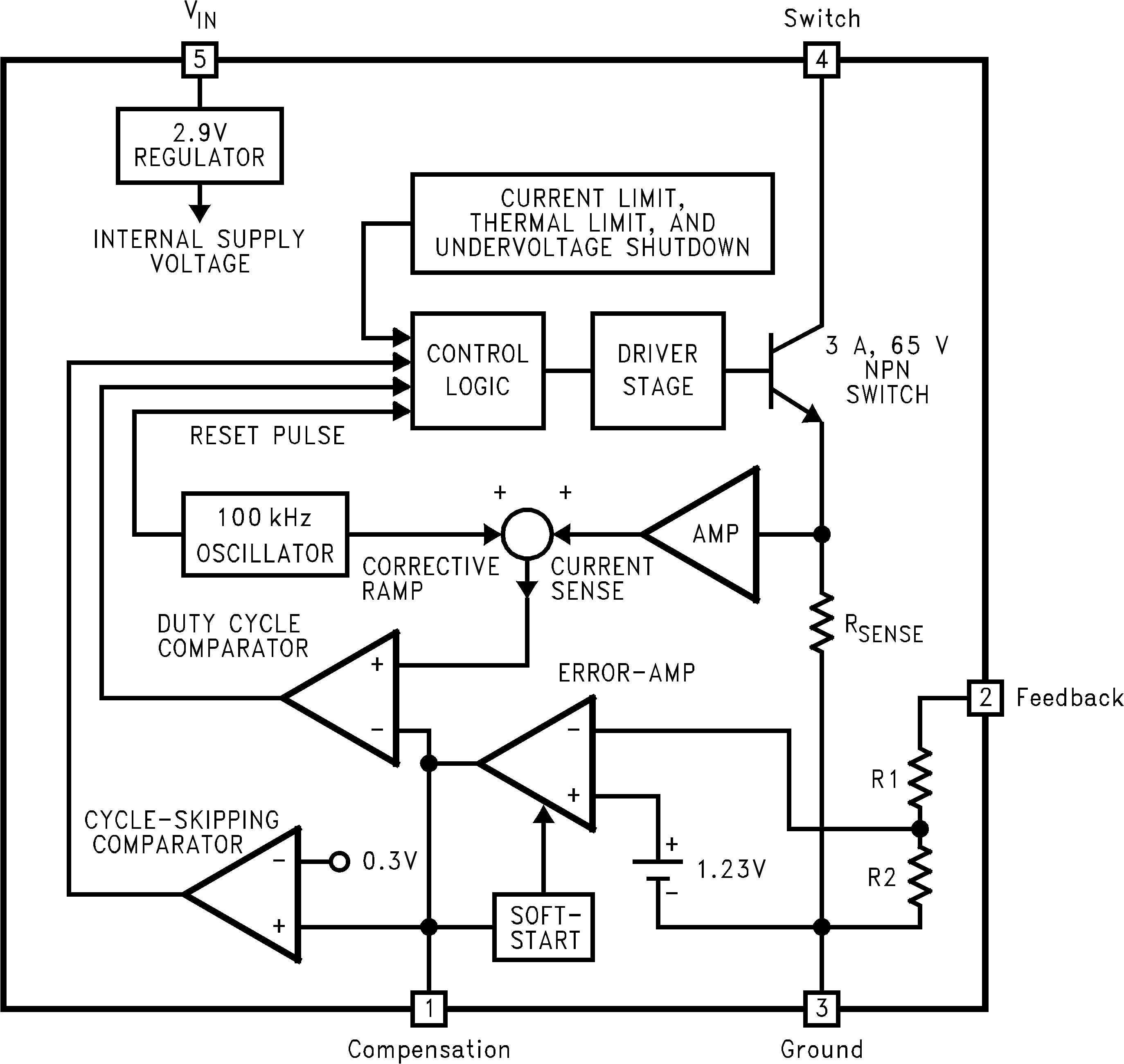
The power switch is a 3-A NPN device that can standoff 65 V. Protecting the power switch are current and thermal limiting circuits and an under-voltage lockout circuit. This IC contains a 100-kHz fixed-frequency internal oscillator that permits the use of small magnetics. Other features include soft start mode to reduce in-rush current during start-up, current mode control for improved rejection of input voltage, and output load transients and cycle-by-cycle current limiting. An output voltage tolerance of ±4%, within specified input voltages and output load conditions, is specified for the power supply system.
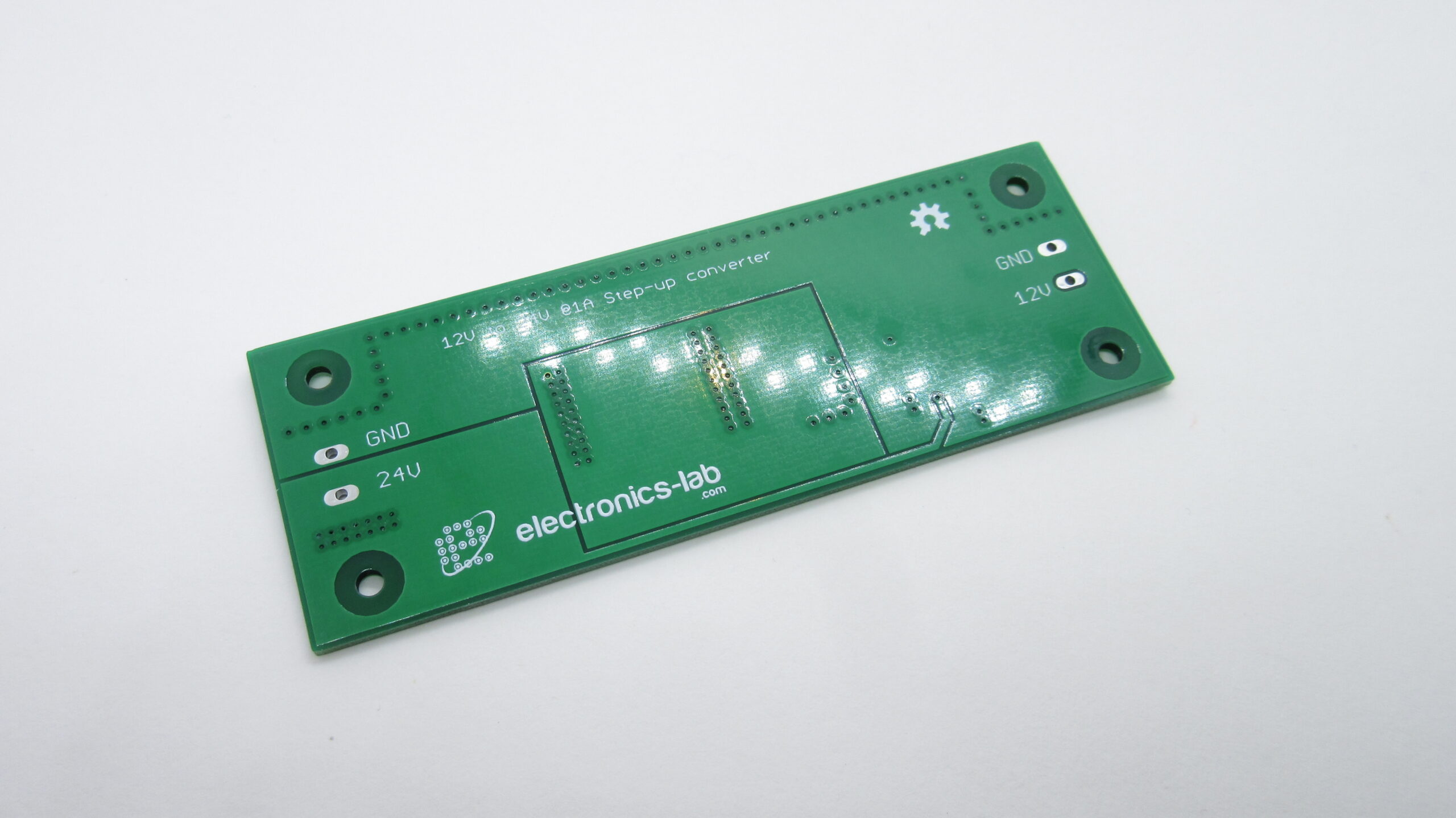
Specifications
Vin: 10-15V DC
Vout: 24V DC
Iout: 1A (can go up to 1.5A with forced cooling)
Switching Frequency: 100KHz
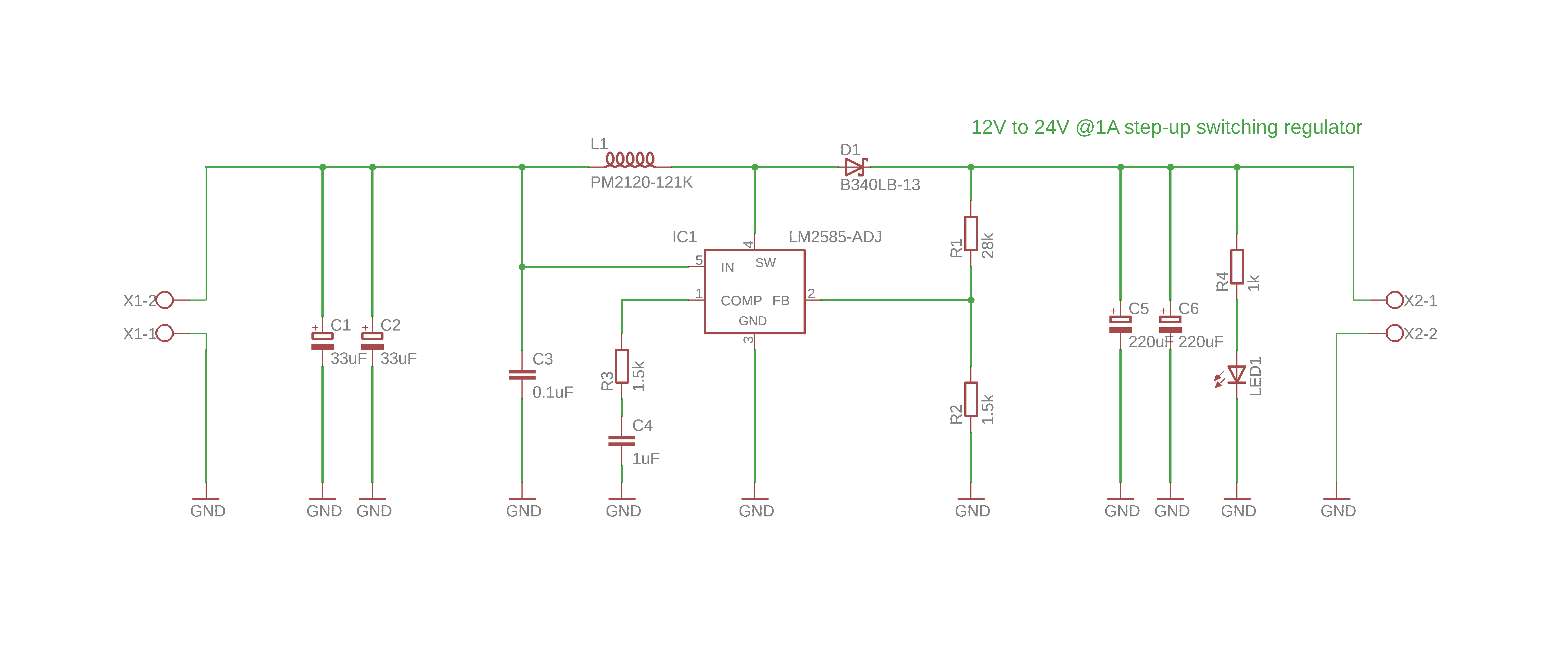
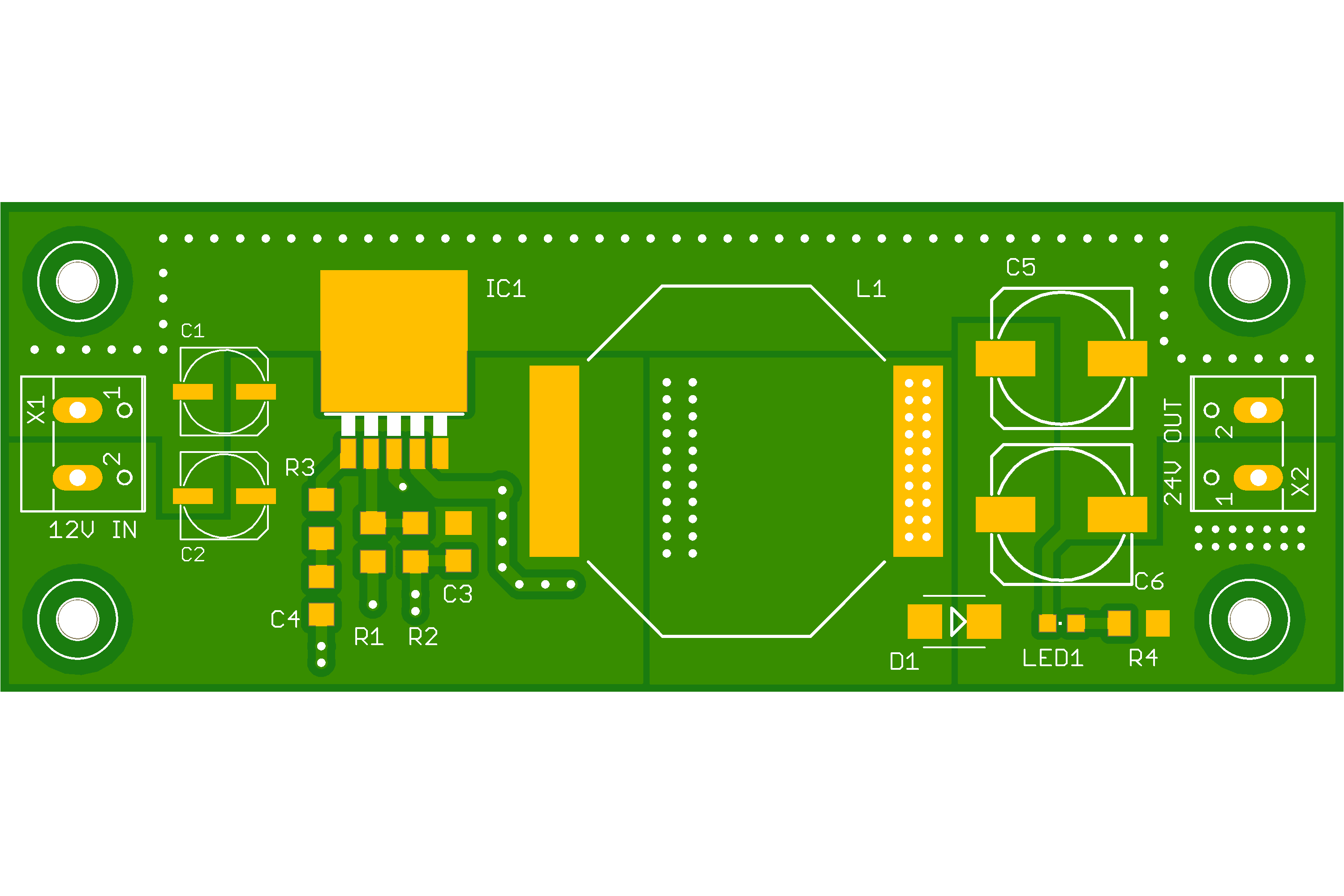
Schematic is a simple boost topology arrangement based on datasheet. Input capacitors and diode should be placed close enough to the regulator to minimize the inductance effects of PCB traces. IC1, L1, D1, C1,C2 and C5,C6 are the main parts used in voltage conversion. Capacitor C3 is a high-frequency bypass capacitor and should be placed as close to IC1 as possible.
All components are selected for their low loss characteristics. So capacitors selected have low ESR and inductor selected has low DC resistance.
At maximum output power, there is significant heat produced by IC1 and for that reason, we mounted it directly on the ground plane to achieve maximum heat dissipation.
Block Diagram
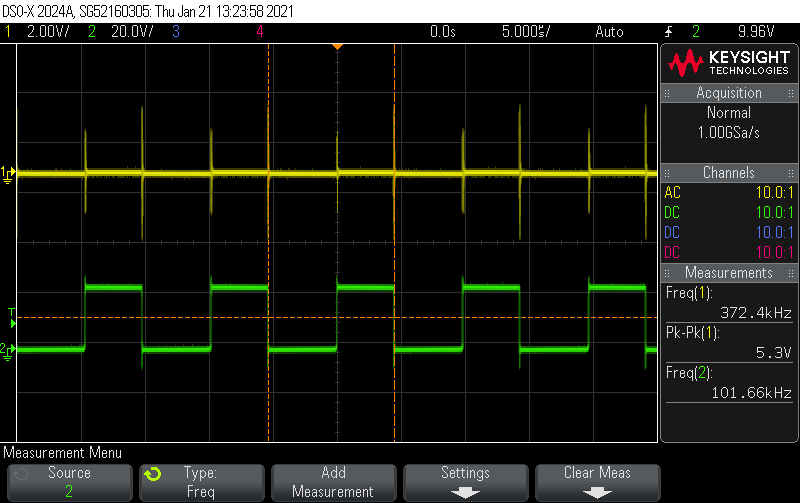
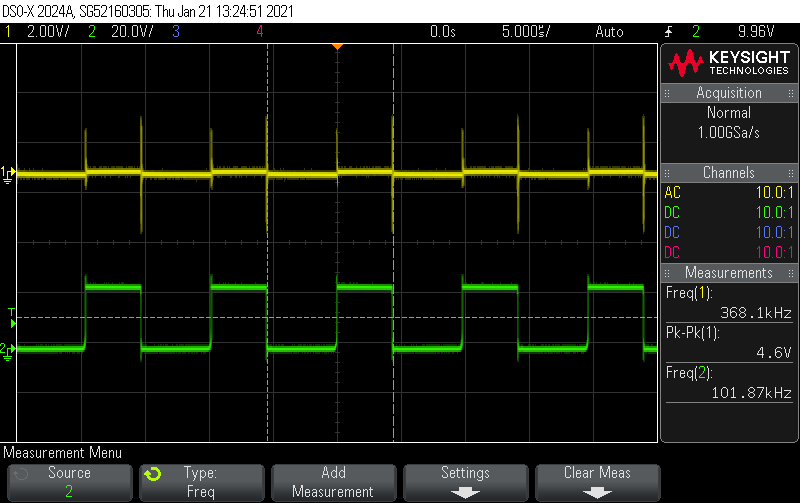
Measurements
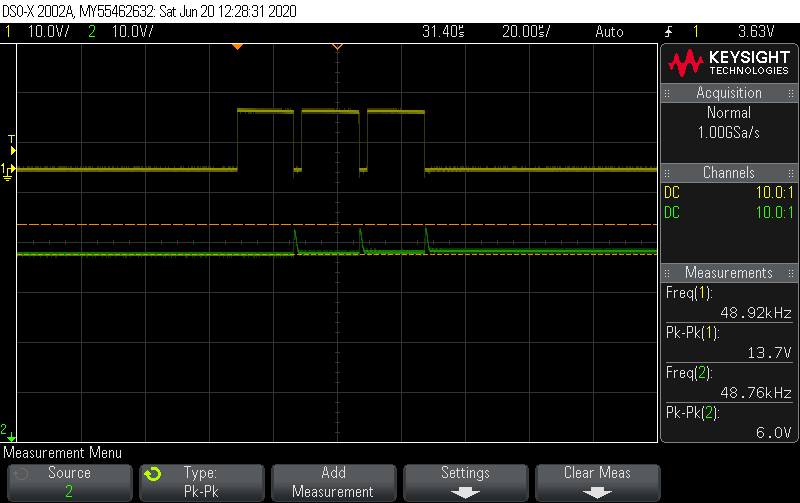
CH1: Output Voltage ripple with 12V Input and 24V @ 500mA output – 5.3 Vpp – CH2: voltage at PIN 4 of IC1CH1: Output Voltage ripple with 12V Input and 24V @ 1A output – 4.6Vpp – CH2: voltage at PIN 4 of IC1
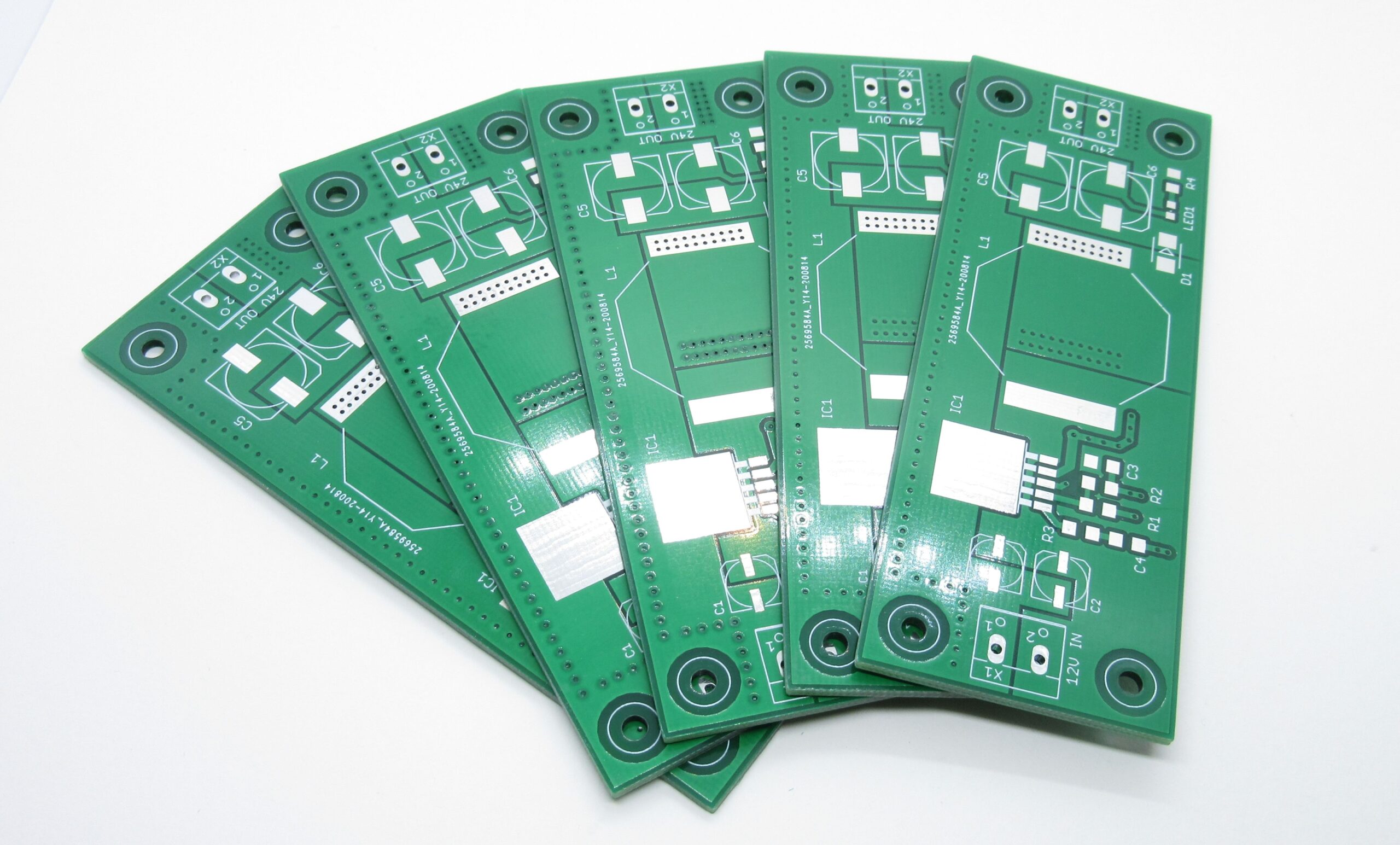
If you would like to receive a PCB, we can ship you one for 6$ (worldwide shipping) click here to contact us
Parts List
Part
Value
Package
MPN
Mouser No
C1 C2
33uF 25V 1Ω
6.3 x 5.4mm
UWX1E330MCL1GB
647-UWX1E330MCL1
C3
0.1uF 50V 0Ω
1206
C1206C104J5RACTU
80-C1206C104J5R
C4
1uF 25V
1206
C1206C105K3RACTU
80-C1206C105K3R
C5 C6
220uF 35V 0.15Ω
10 x 10.2mm
EEE-FC1V221P
667-EEE-FC1V221P
D1
0.45 V 3A 40V Schottky
SMB
B340LB-13-F
621-B340LB-F
IC1
LM2585S-ADJ
TO-263
LM2585S-ADJ/NOPB
926-LM2585S-ADJ/NOPB
L1
120 uH 0.04Ω
30.5 x 25.4 x 22.1 mm
PM2120-121K-RC
542-PM2120-121K-RC
R1
28 KΩ
1206
ERJ-8ENF2802V
667-ERJ-8ENF2802V
R2 R3
1.5 KΩ
1206
ERJ-8ENF1501V
667-ERJ-8ENF1501V
R4
1 KΩ
1206
RT1206FRE07931KL
603-RT1206FRE07931KL
LED1
RED LED 20mA 2.1V
0805
599-0120-007F
645-599-0120-007F
Connections
Gerber View
Simulation
We’ve done a simulation of the LM2585 step-up DC-DC converter using the TI’s WEBENCH online software tools and some of the results are presented here.
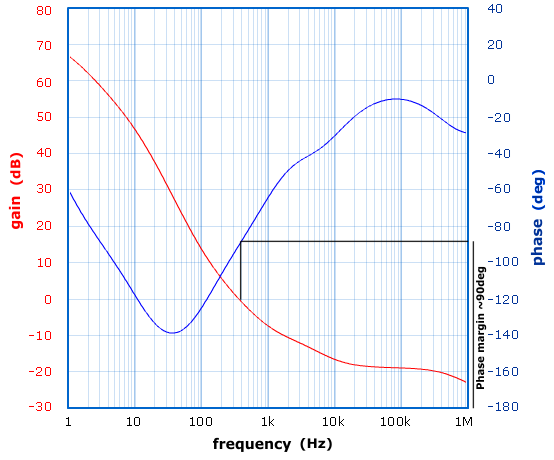
The first graph is the open-loop BODE graph. In this graph, we see a plot of GAIN vs FREQUENCY in the range 1Hz – 1M and PHASE vs FREQUENCY in the same range. This plot is useful as it gives us a detailed view of the stability of the loop and thus the stability and performance of our DC-DC converter.
Bode plot of open control loop
What’s interesting on this plot is the “phase margin” and “gain margin“. The gain margin is the gain for -180deg phase shift and phase margin is the phase difference from 180deg for 0db gain as shown in the plot above. For the system to be considered stable there should be enough phase margin (>30deg) for 0db gain or when phase is -180deg the gain should be less than 0db.
On the plot above we see that the phase margin is ~90deg and that ensures that the DC-DC converter will be stable over the measured range.
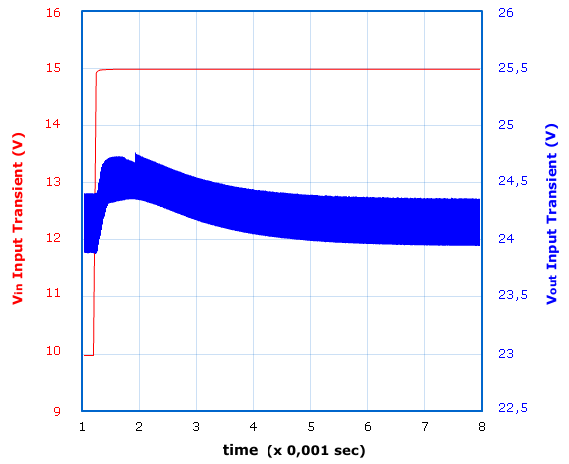
The next simulation graph is the Input Transient plot over time.
Input Transient simulation
In this plot, we see how the output voltage is recovering when the input voltage is stepped from 10V to 15V. We see that 4ms after the input voltage is stepped the output has recovered to the normal output voltage of 24V.
The next graph is the Load Transient.
Load Transient simulation
Load transient is the response of output voltage to sudden changes of load or Iout. We see that the output current suddenly changes from 0,1A to 1A and that the output voltage drops down to 23,2V until it recovers in about 3ms. We also see that when the load is reduced from 1A to 0,1A, output voltage spikes up to ~25,5V, then rings until it recovers to 24V in about 4ms.
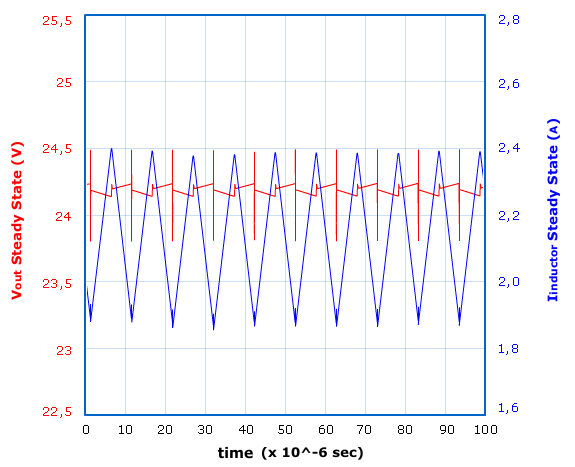
The last graph shows the Steady State operation of DC-DC converter @ 1A output.
This graph shows the simulated output voltage ripple and inductor current. We see that output voltage ripple is ~0,6Vpp and the inductor current has a peak current of 2,4A. The inductor we used is rated at max 5,6A DC so it can easily withstand such operating current and without much heating of the coil.
Operating point data (Vin=13V, Iout=1A)
Operating Values
Pulse Width Modulation (PWM) frequency
Frequency
100 kHz
Continuous or Discontinuous Conduction mode
Mode
Cont
Total Output Power
Pout
24.0 W
Vin operating point
Vin Op
13.00 V
Iout operating point
Iout Op
1.00 A
Operating Point at Vin= 13.00 V,1.00 A
Bode Plot Crossover Frequency, indication of bandwidth of supply
Cross Freq
819 Hz
Steady State PWM Duty Cycle, range limits from 0 to 100
Duty Cycle
48.3 %
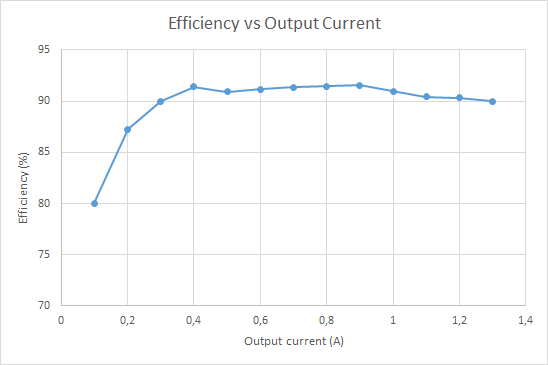
Steady State Efficiency
Efficiency
93.2 %
IC Junction Temperature
IC Tj
65.2 °C
IC Junction to Ambient Thermal Resistance
IC ThetaJA
34.9 °C/W
Current Analysis
Input Capacitor RMS ripple current
Cin IRMS
0.14 A
Output Capacitor RMS ripple current
Cout IRMS
0.48 A
Peak Current in IC for Steady State Operating Point
IC Ipk
2.2 A
ICs Maximum rated peak current
IC Ipk Max
3.0 A
Average input current
Iin Avg
2.0 A
Inductor ripple current, peak-to-peak value
L Ipp
0.50 A
Power Dissipation Analysis
Input Capacitor Power Dissipation
Cin Pd
0.01 W
Output Capacitor Power Dissipation
Cout Pd
0.035 W
Diode Power Dissipation
Diode Pd
0.45 W
IC Power Dissipation
IC Pd
1.0 W
Inductor Power Dissipation
L Pd
0.16 W
Configuring Output Voltage
The output voltage is configured by R1, R2 according to the following expression (Vref=1,23V)
VOUT = VREF (1 + R1/R2)
If R2 has a value between 1k and 5k we can use this expression to calculate R1:
R1 = R2 (VOUT/VREF − 1)
For better thermal response and stability it is suggested to use 1% metal film resistors.
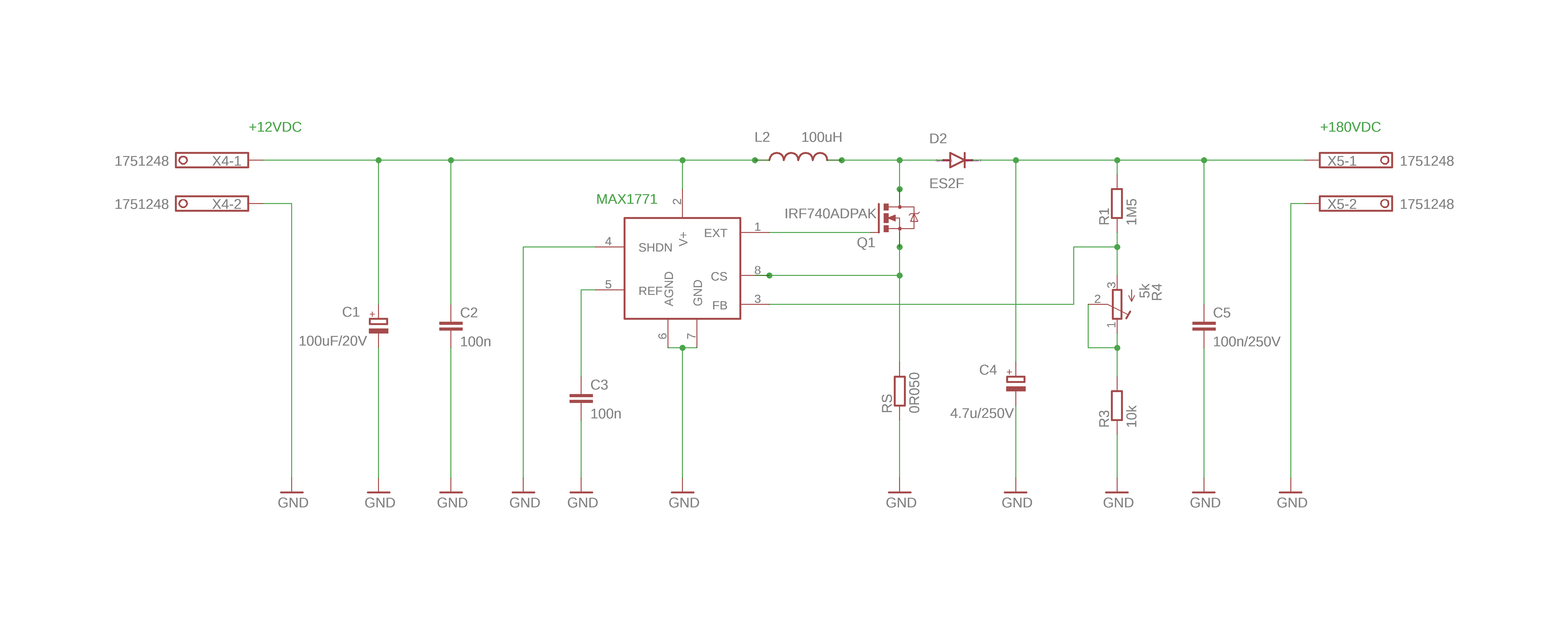
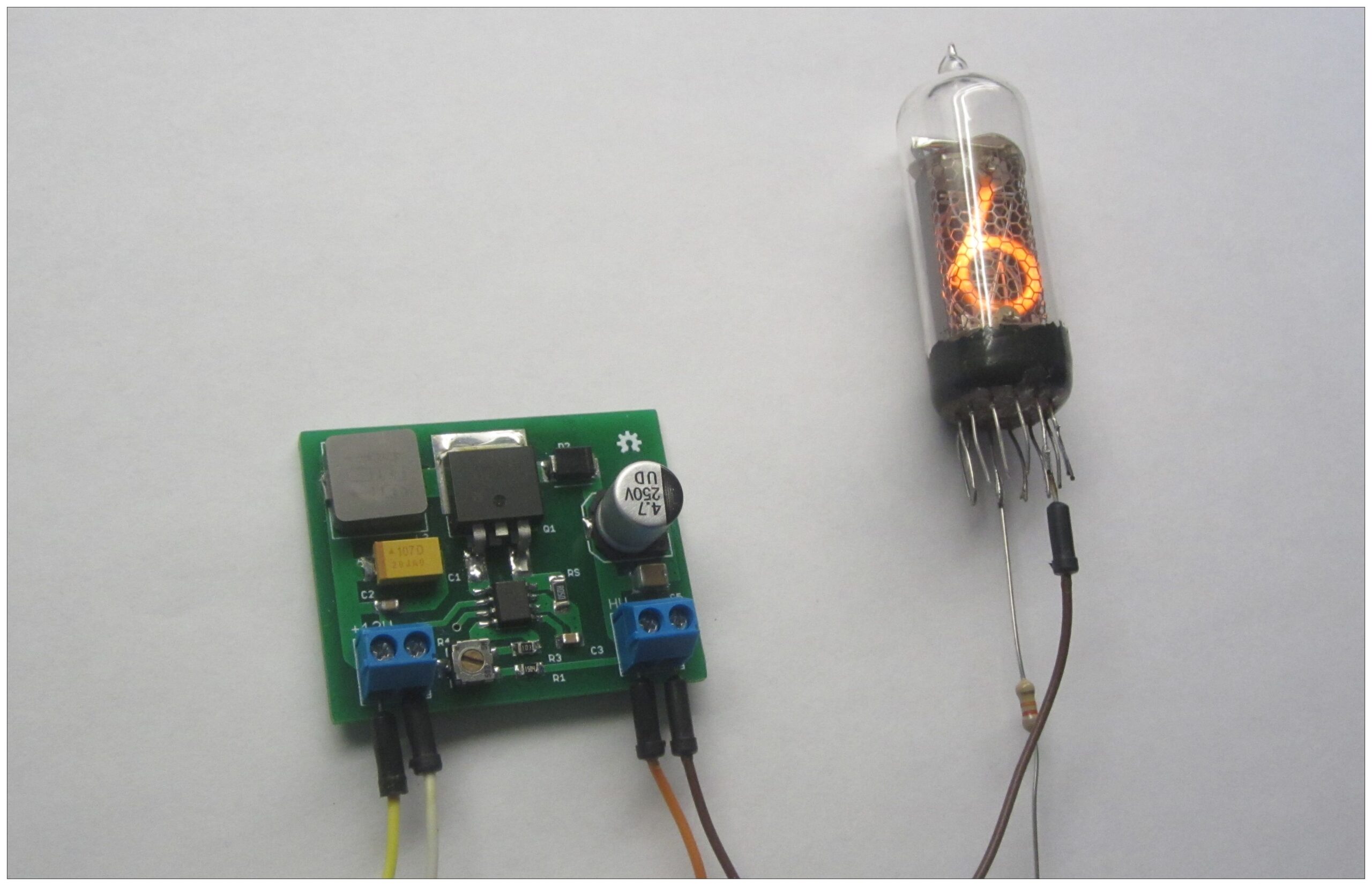
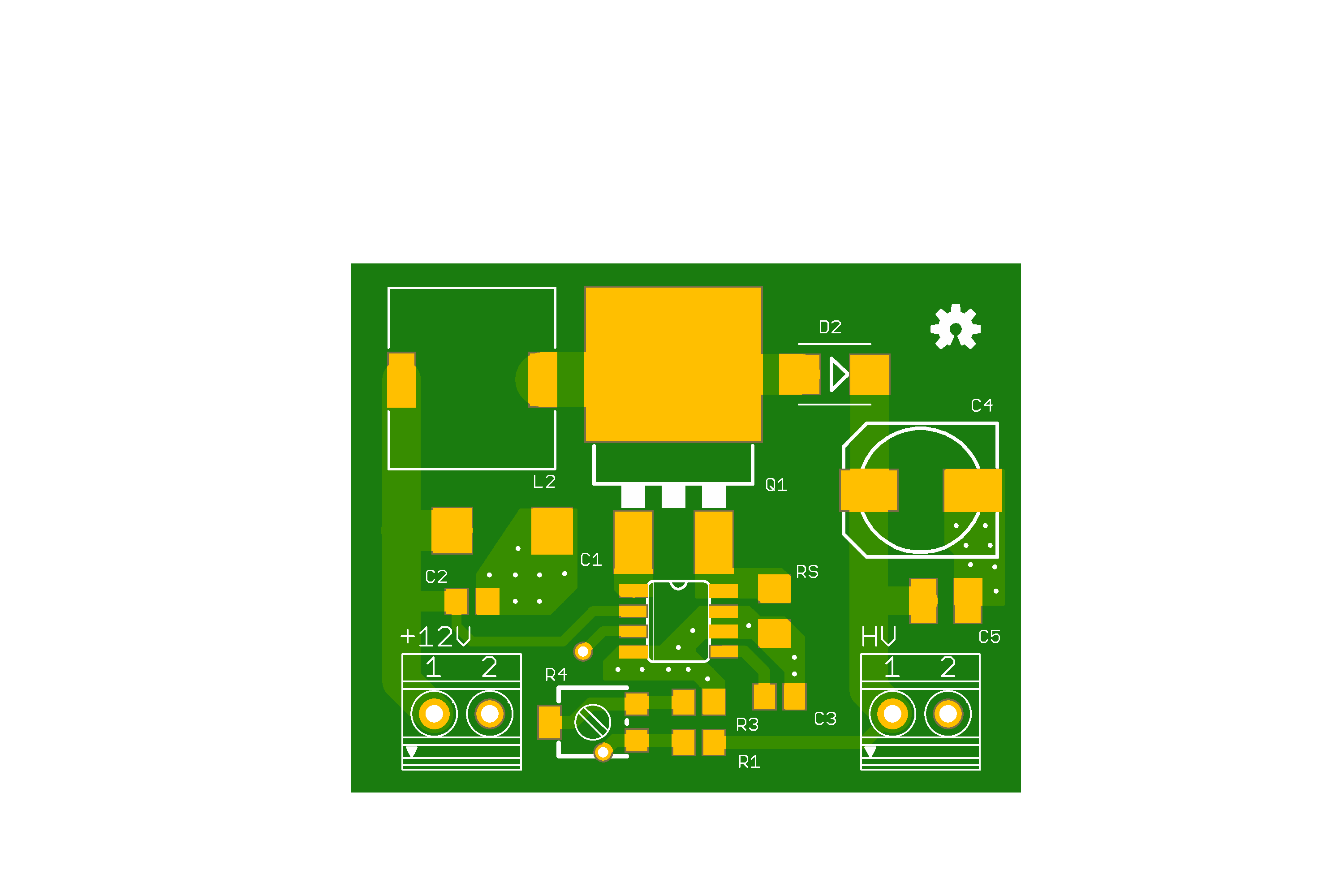
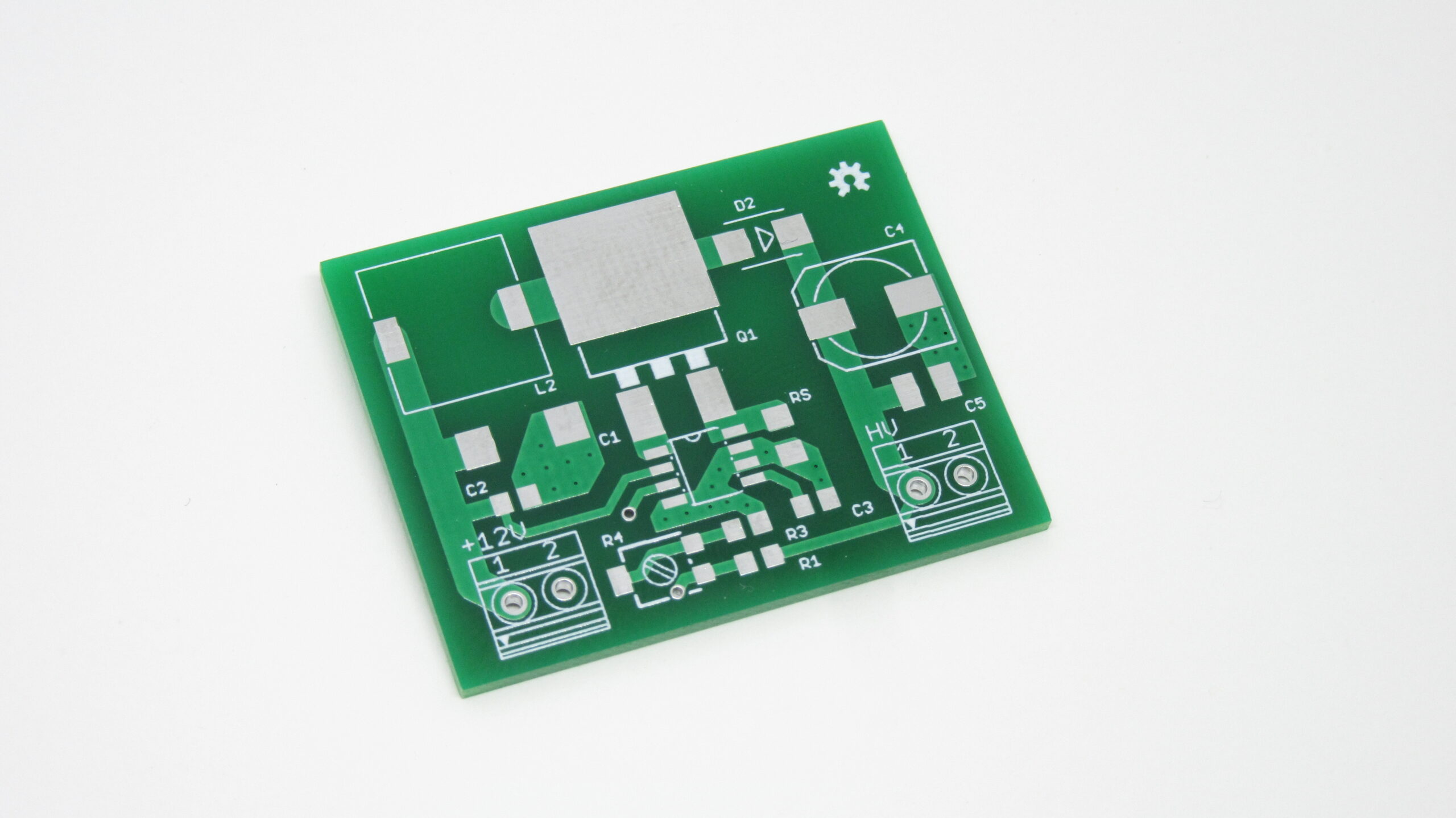
Nixie tubes need about ~180Vdc to light up and thus on most devices, a DC-DC converter is needed. Here we designed a simple DC-DC switching regulator capable of powering most of Nixie tubes. The board accepts 12Vdc input and gives an output of 150-250Vdc. The board is heavily inspired by Nick de Smith’s design.
Description
The module is based on the MAX1771 Step-Up DC-DC Controller. The controller works up to 300kHz switching frequency and that allows the usage of miniature surface mount components. In the default configuration, it accepts an input voltage from 2V to Vout and outputs 12V, but in this module, the output voltage is selected using the onboard potentiometer and it’s in the range 150-250Vdc. The maximum output current is 50mA @ 180Vdc.
The MAX1771 is driving an external N-channel MOSFET (IRF740) and with the help of the inductor and a fast diode, high voltage is produced.
MOSFET has to be low RDSon, the diode has to be fast Mttr, typically < 50nS, and capacitors have to be low ESR type to have good efficiency.
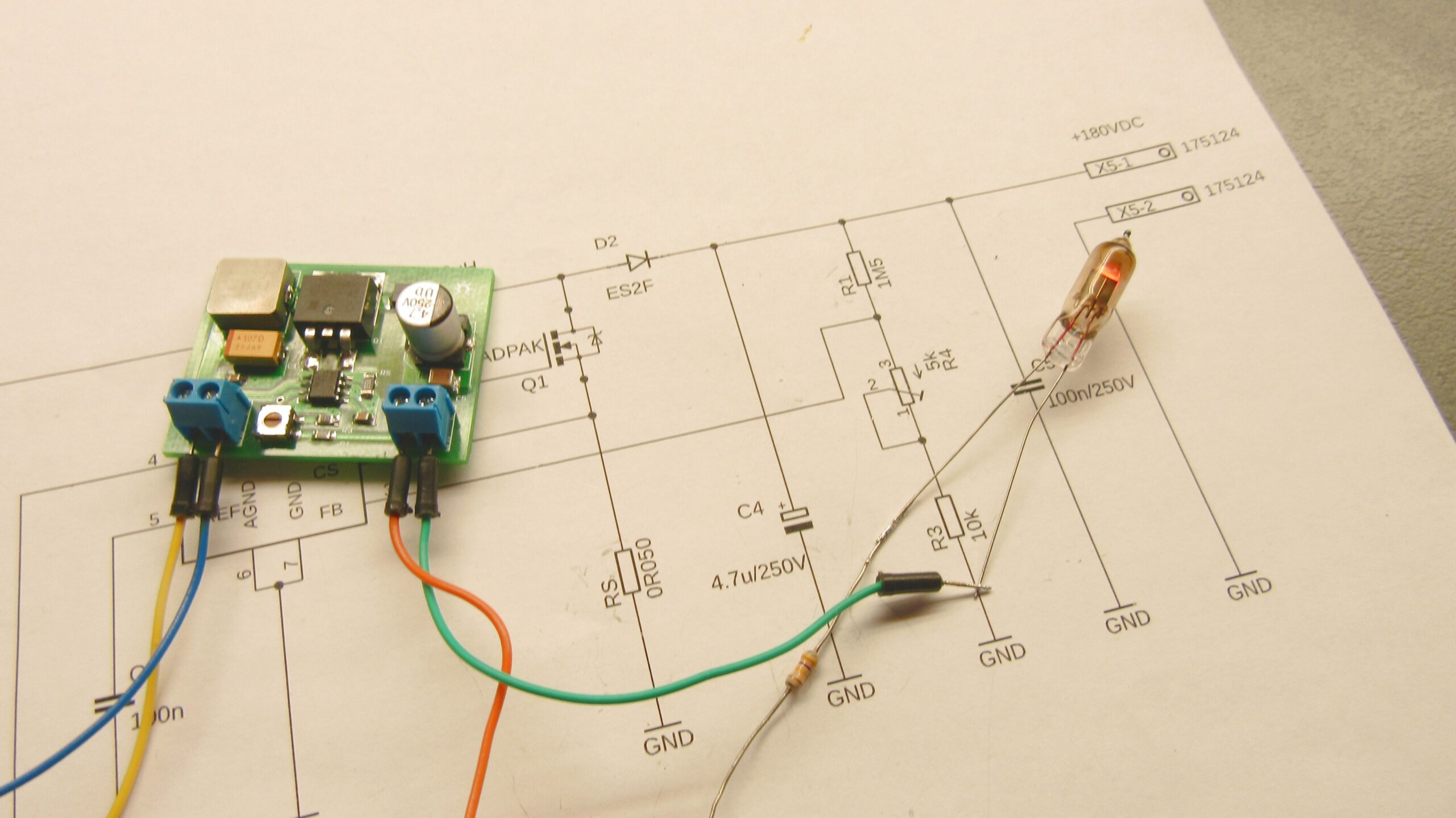
Precautions must be taken as this power supply uses high voltages. Build it only if you know what you are dealing with. Don’t touch any of the parts while in use.
Pay attention on the placement of C1 tantalum capacitor, as the bar indicates the anode (positive lead)
Schematic
Parts List
Part
Value
LCSC.com
R1
1.5M - 0805 SMD
C118025
R3
10k 0805
C269724
R4
5k trimmer SMD
C128557
Rs
0.05 Ohm - 0805 SMD
C149662
C1
100uF Tantalium SMD
C122302
C2, C3
100nF - 0805 SMD
C396718
C4
4.7uF / 250V SMD
C88702
C5
100nF / 250V SMD 1210
C52020
IC
MAX1771 SO-8
C407903
L1
100uH / 2.5 A
C2962892
Q1
IRF740 D2PAK (TO-263-2)
C39238
D2
ES2F-E3, ES2GB
C145321, C2844160
X1, X2
Screw Terminal - P=3.5mm
C474892
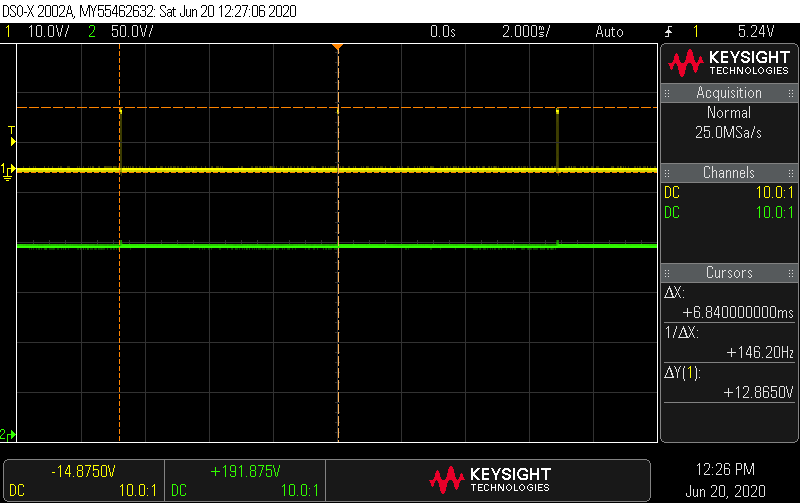
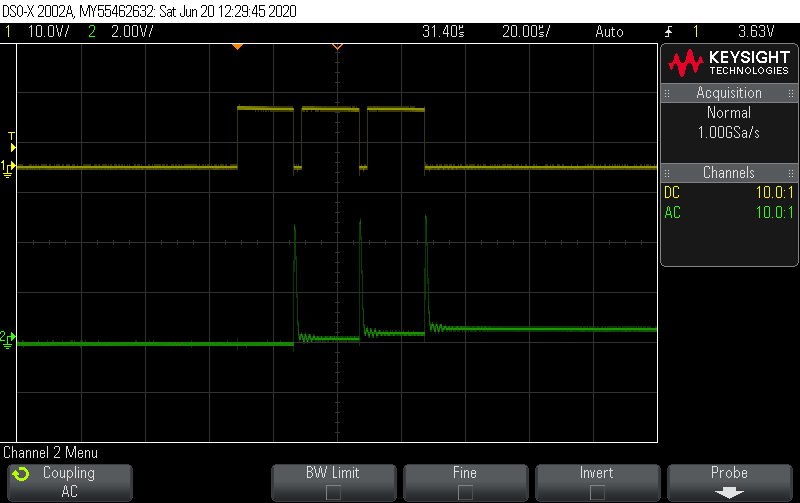
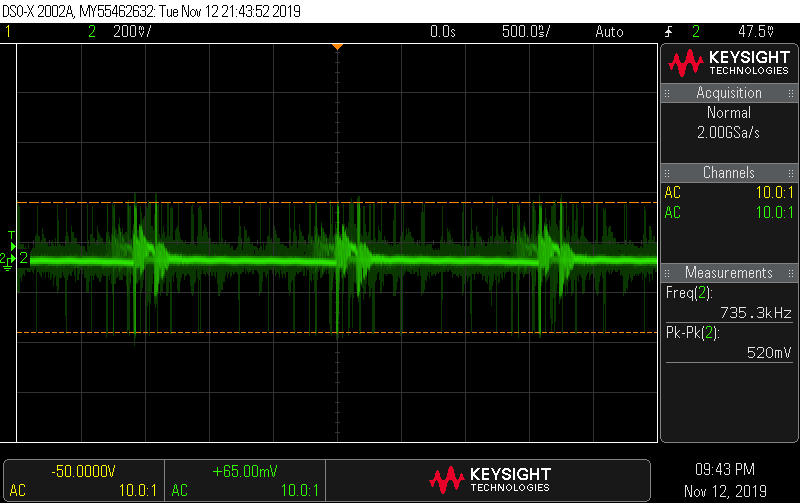
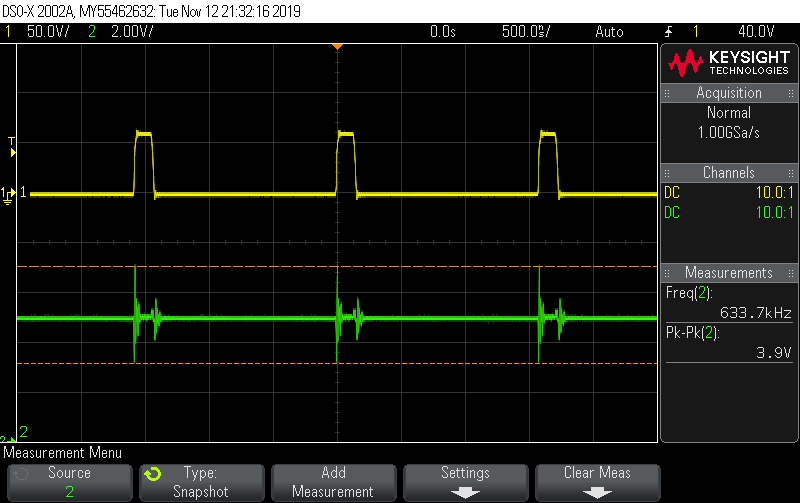
Oscilloscope Measurements
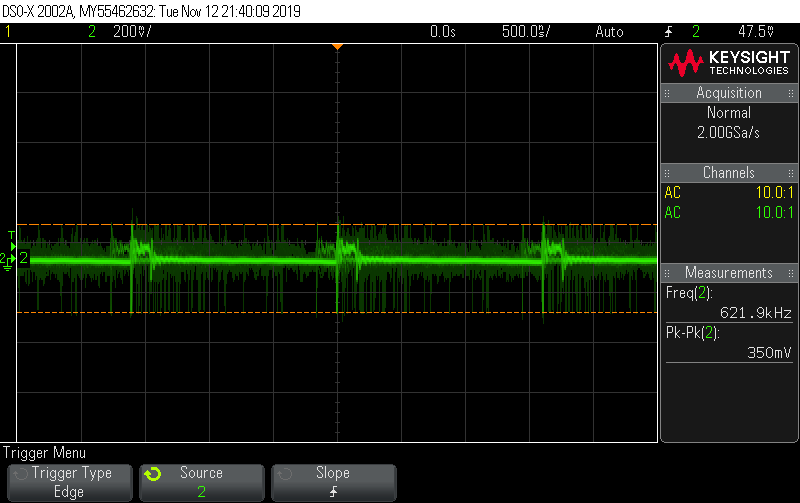
Yellow is the MOSFET Gate voltage and Green the output high voltage (~180Vdc). We see that the transistor switches with a low frequency of 146Hz and with a peak gate voltage of 12.8Vzoom in to the above short pulses reveals 3x pulses with 48.7Khz frequency to the gate of MOSFET. Also, the peak to peak ripple on output is 6Vfurther zoom to the output ripple reveals some short ringing and the peak ripple voltage.
Efficiency
The module’s efficiency is calculated for two output currents (50mA and 25mA) at 180Vdc voltage output and 12V input. In the first case, the Pout = 8.1W while the Pin=10.96W, so efficiency is calculated at 73.9%. In the second case, the Pout = 4.1W while the Pin=5.52W, so efficiency is calculated at 74.2%. We see that for lower currents efficiency is a little greater than for the maximum current of 50mA.
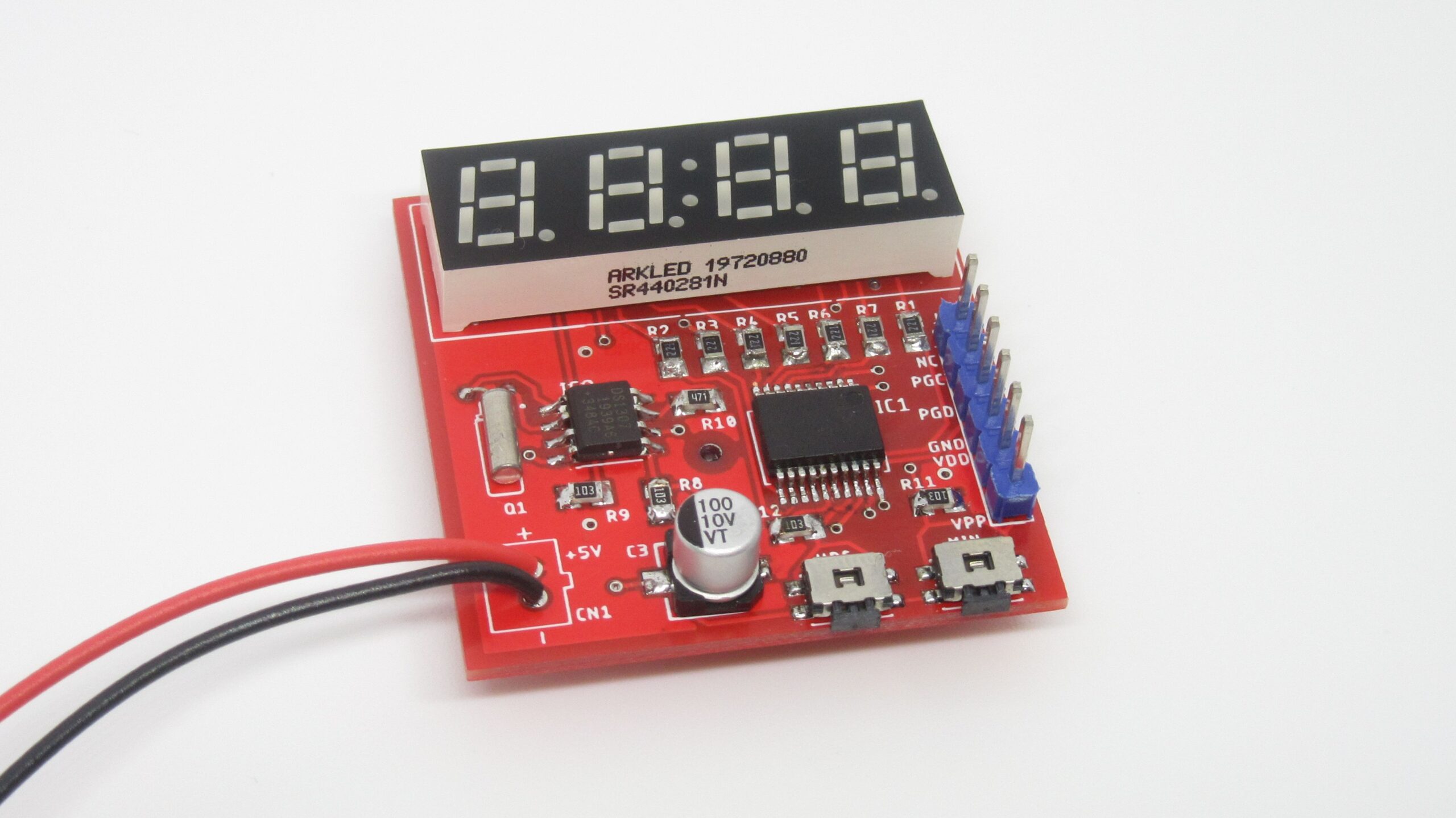
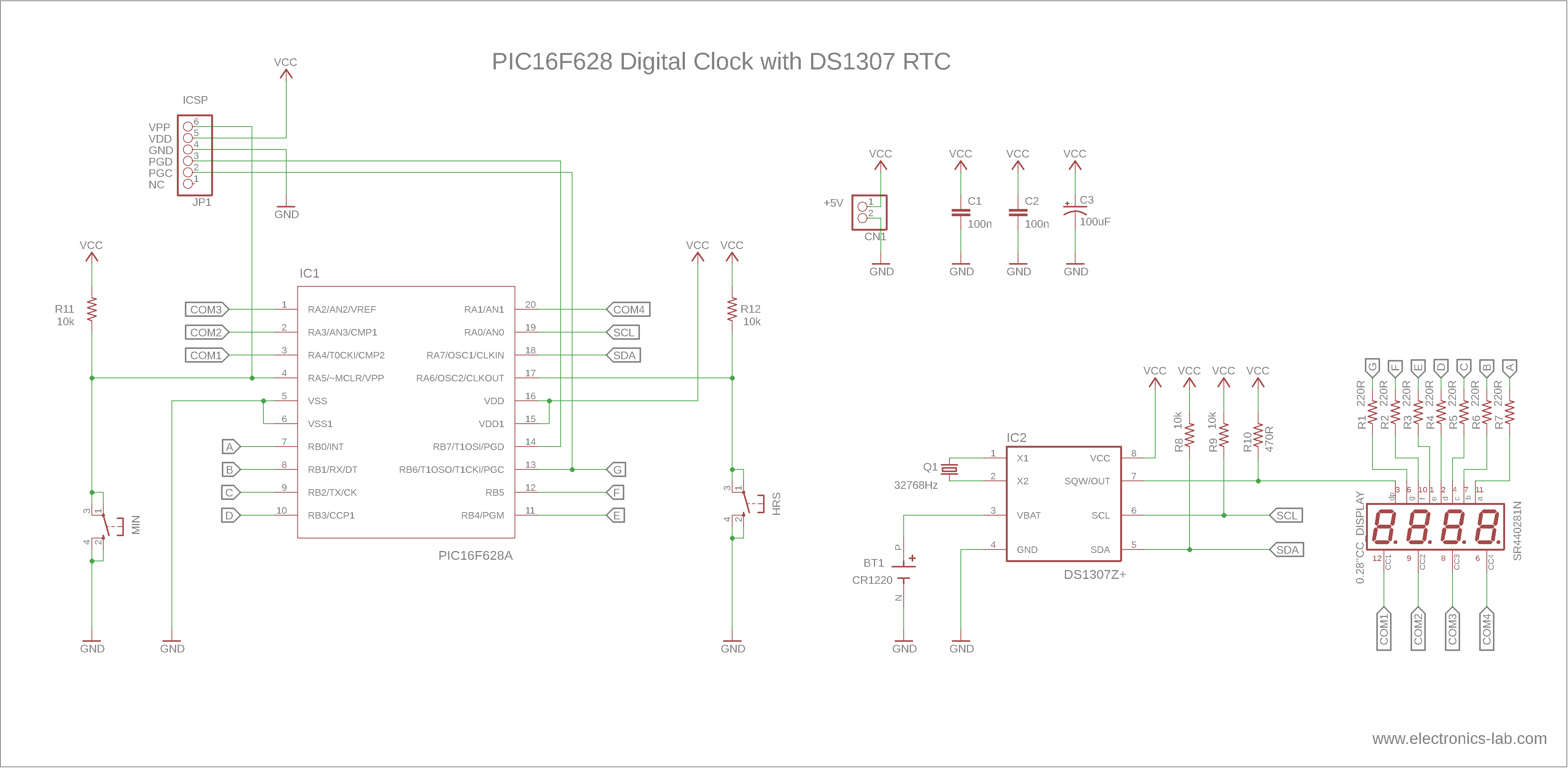
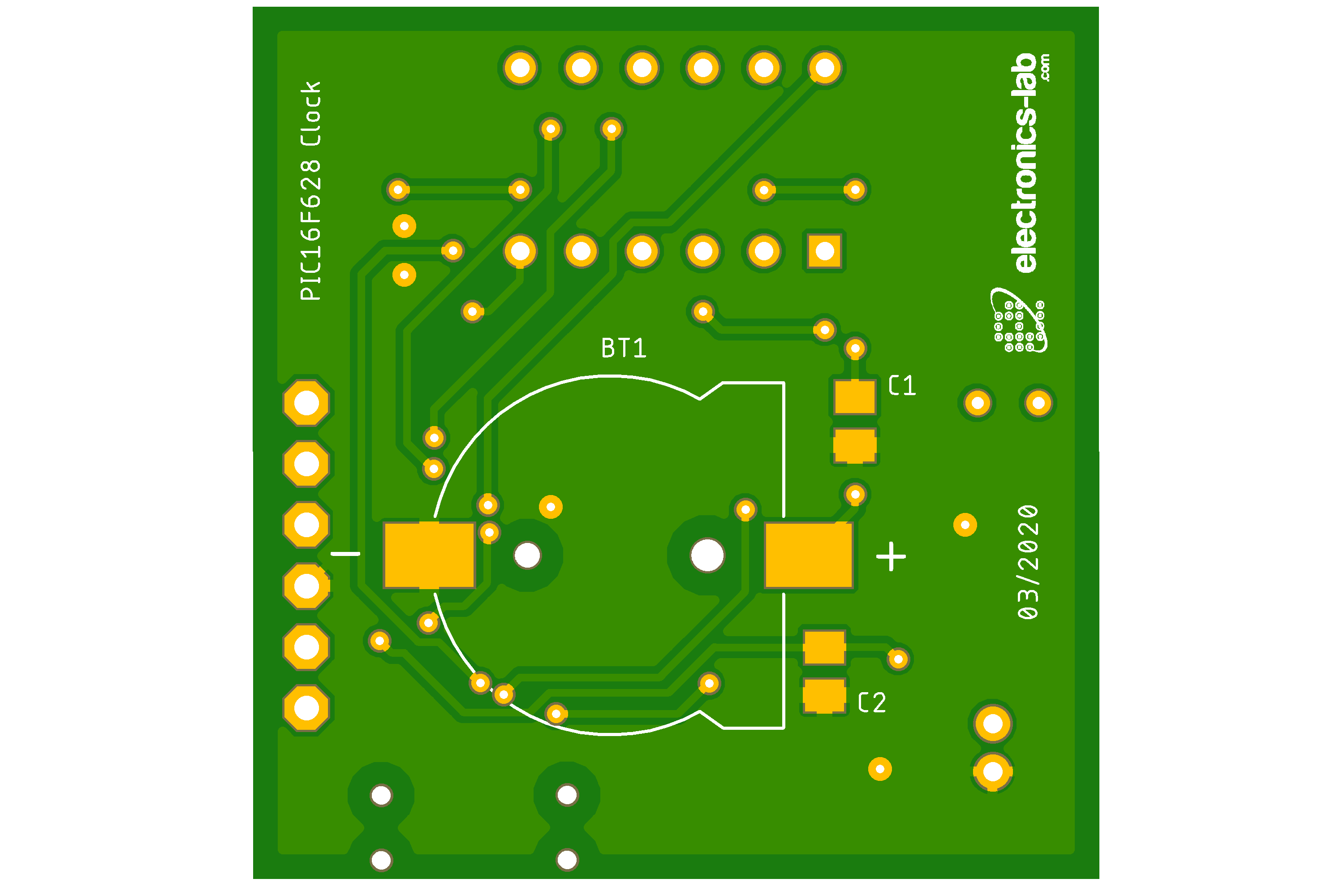
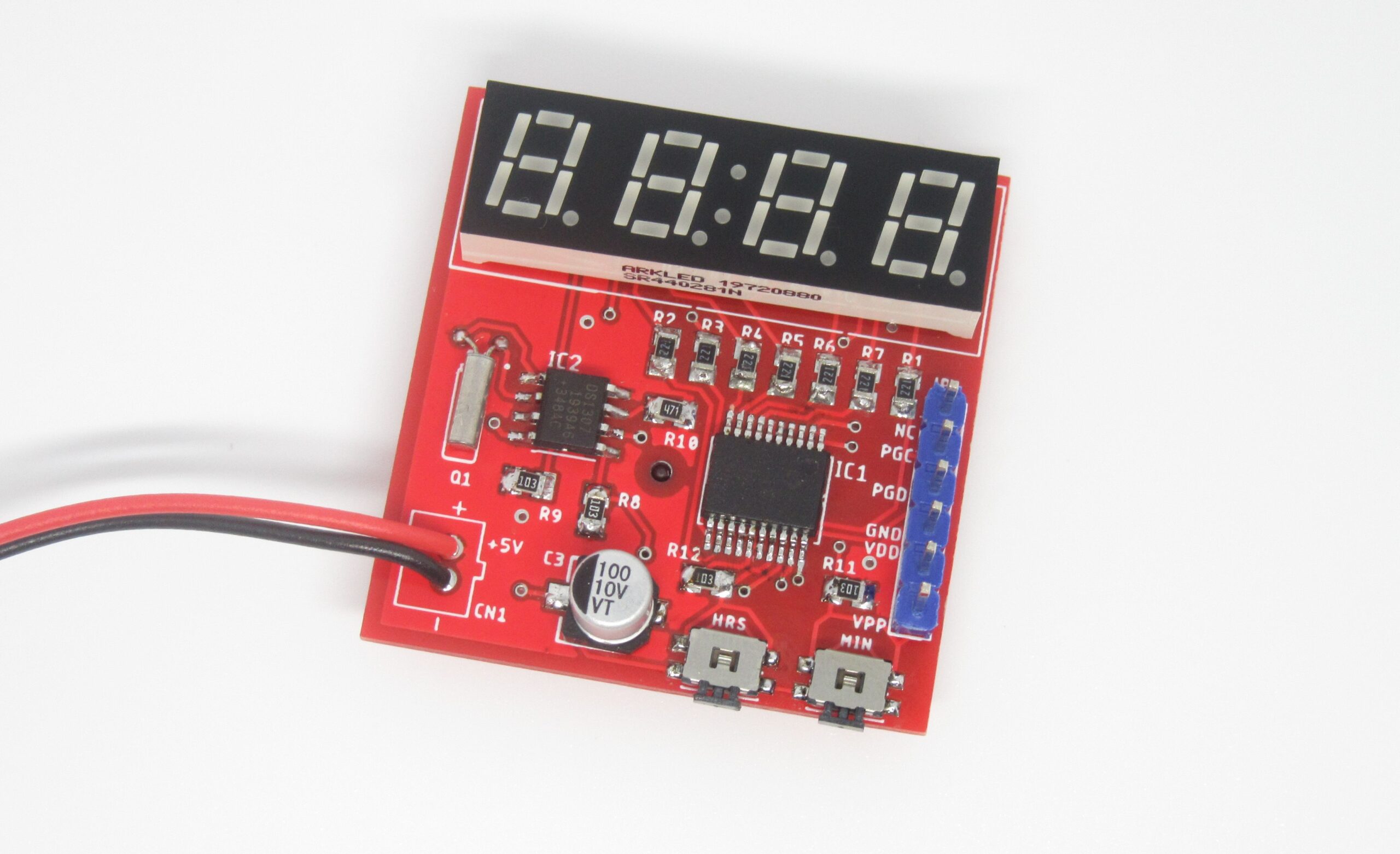
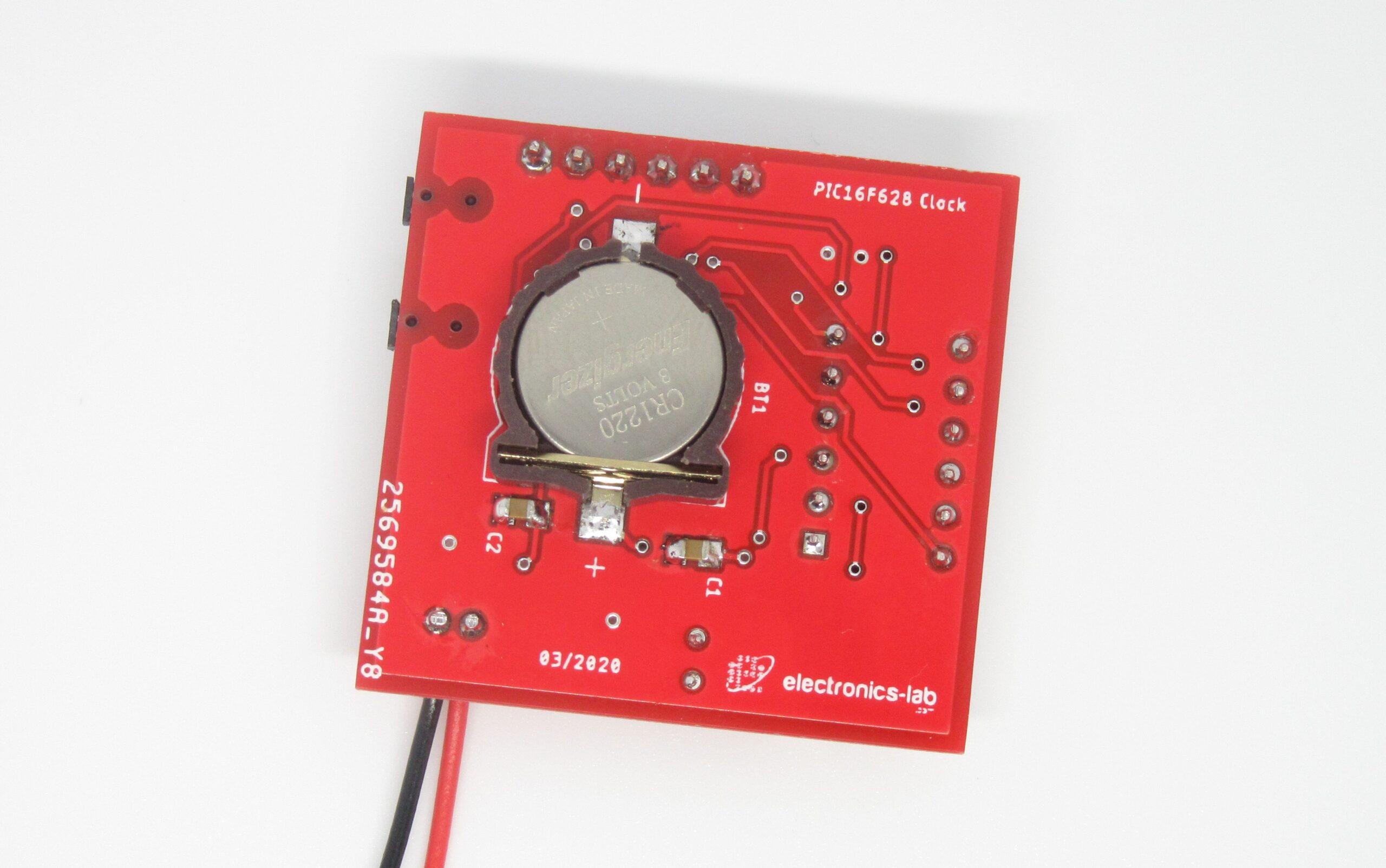
This is a minimal and small clock based on PIC16F628A microcontroller and DS1307 RTC IC. It is able to only show the time on a small 7-segment display with a total of 4 segments. The display we used is a 0.28″ SR440281N RED common cathode display bought from LCSC.com, but you can use other displays as well such as the 0.56″ Kingbright CC56-21SRWA. This project is heavily inspired by the “Simple Digital Clock with PIC16F628A and DS1307” in the case of schematic and we also used the same .hex as”Christo”.
Schematic
The schematic is straight forward. The heart is the PIC16F628A microcontroller running on the internal 4MHz oscillator, so no external crystal is needed. This saves us 2 additional IOs. The RESET Pin (MCLR) is also used as input for one of the buttons. All display segments are connected to PORTB and COMs are connected to PORTA. The RTC chip is also connected to PORTA using the I2C bus.
The refresh rate of the digits is about 53Hz and there is no visible flickering. The display segments are time-multiplexed and this makes them appear dimmer than the specifications. To compensate we are going to use some low resistors on the anodes. “Christo” tested it with different values for current limiting resistors R1-R7 and below 220Ω the microcontroller starts to misbehave (some of the digits start to flicker) above 220 Ohm everything seems OK. On the display we used the two middle dots are not connected to any pin on the package, so for the seconds’ indicators, we used the “comma” dots. These pins are connected to the SQW pin of the DS1307, which provides a square wave output with 1 sec period. The SQW pin is open drain, so we need to add a pull-up resistor. Τhe value of this resistor is chosen at 470Ω, after some trial and error testing. On the input side of the MCU, there are two buttons for adjusting the MINUTES and HOURS of the clock as indicated on the schematic. Onboard there is also an ICSP Programming connector, to help with the firmware upload. Finally, there is one unused pin left (RB7), which can be used for additional functionality, like adding a buzzer or an additional LED.
The DS1307 RTC needs an external crystal to keep the internal clock running and a backup battery to keep it running while the main power is OFF. So, the next time you power ON the clock the time would be current. To keep the overall board dimensions small we used a CR1220 battery holder with the appropriate 3V battery. Power consumption is about 35-40mA @ 5V input.
Code
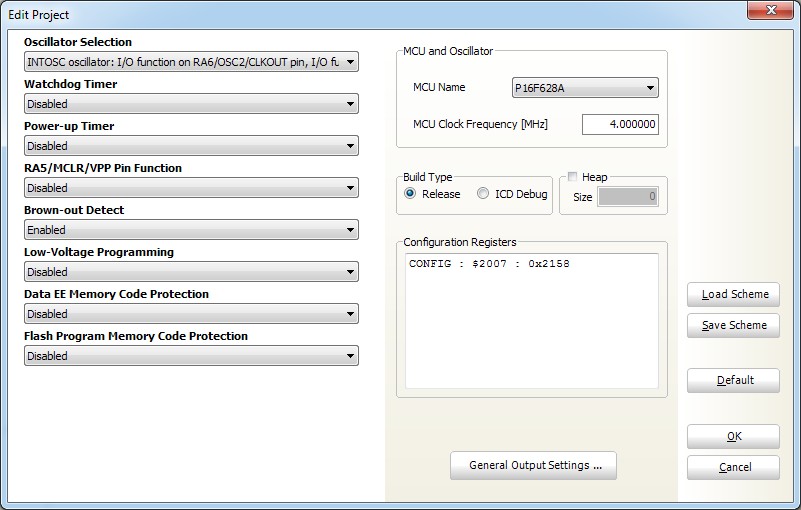
According to the author, the code is written and compiled with MikroC Pro and uses the build-in software I2C library for communicating with RTC chip. If you want to use MPLAB IDE for compiling the code you should write your own I2C library from scratch. For programming the board we used PICkit 3 programmer and software. In this case, in the “Tools” menu check the option “Use VPP First Program Entry“.
PIC Programmer Configuration
The code for this project is listed below. Additionally, you will need the “Digital Clock (PIC16F628A, DS1307, v2).h” file which can be found on the .zip in downloads below. Compiled .hex file is also provided on the same .zip file.
#include "Digital Clock (PIC16F628A, DS1307, v2).h"
#define b1 RA6_bit
#define b2 RA5_bit
// b1_old, b2_old - old state of button pins
// hour10, hour1 - tens and ones of the hour
// min10, min1 = tens and ones of the minutes
byte b1_old, b2_old, hour1, hour10, min1, min10;
// definitions for Software_I2C library
sbit Soft_I2C_Scl at RA0_bit;
sbit Soft_I2C_Sda at RA7_bit;
sbit Soft_I2C_Scl_Direction at TRISA0_bit;
sbit Soft_I2C_Sda_Direction at TRISA7_bit;
// correct bits for each digit
// RB6 RB5 RB4 RB3 RB2 RB1 RB0
// g f e d c b a
// 0: 0 1 1 1 1 1 1 0x3F
// 1: 0 0 0 0 1 1 0 0x06
// 2: 1 0 1 1 0 1 1 0x5B
// 3: 1 0 0 1 1 1 1 0x4F
// 4: 1 1 0 0 1 1 0 0x66
// 5: 1 1 0 1 1 0 1 0x6D
// 6: 1 1 1 1 1 0 1 0x7D
// 7: 0 0 0 0 1 1 1 0x07
// 8: 1 1 1 1 1 1 1 0x7F
// 9: 1 1 0 1 1 1 1 0x6F
// BL: 0 0 0 0 0 0 0 0x00
const byte segments[11] = {0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, 0x6F, 0x00};
//***********************************************//
// Sets read or write mode at select address //
//***********************************************//
void DS1307_Select(byte Read, byte address) {
Soft_I2C_Start();
Soft_I2C_Write(0xD0); // start write mode
Soft_I2C_Write(address); // write the initial address
if (Read) {
Soft_I2C_Stop();
Soft_I2C_Start();
Soft_I2C_Write(0xD1); // start read mode
}
}
//********************************//
// Initialize the DS1307 chip //
//********************************//
void DS1307_Init() {
byte sec, m, h;
DS1307_Select(1, 0); // start reading at address 0
sec = Soft_I2C_Read(1); // read seconds byte
m = Soft_I2C_Read(1); // read minute byte
h = Soft_I2C_Read(0); // read hour byte
Soft_I2C_Stop();
if (sec > 127) { // if the clock is not running (bit 7 == 1)
DS1307_Select(0, 0); // start writing at address 0
Soft_I2C_Write(0); // start the clock (bit 7 = 0)
Soft_I2C_Stop();
DS1307_Select(0, 7); // start writing at address 7
Soft_I2C_Write(0b00010000); // enable square wave output 1 Hz
Soft_I2C_Stop();
}
m = (m >> 4)*10 + (m & 0b00001111); // converting from BCD format to decimal
if (m > 59) {
DS1307_Select(0, 1); // start writing at address 1
Soft_I2C_Write(0); // reset the minutes to 0
Soft_I2C_Stop();
}
if (h & 0b01000000) { // if 12h mode (bit 6 == 1)
if (h & 0b00100000) // if PM (bit 5 == 1)
h = 12 + ((h >> 4) & 1)*10 + (h & 0b00001111);
else
h = ((h >> 4) & 1)*10 + (h & 0b00001111);
}
else
h = ((h >> 4) & 3)*10 + (h & 0b00001111);
if (h > 23) {
DS1307_Select(0, 2); // start writing at address 2
Soft_I2C_Write(0); // reset the hours to 0 in 24h mode
Soft_I2C_Stop();
}
}
void incrementH() { // increments hours and write it to DS1307
hour1++;
if ((hour10 < 2 && hour1 > 9) || (hour10 == 2 && hour1 > 3)) {
hour1 = 0;
hour10++;
if (hour10 > 2)
hour10 = 0;
}
DS1307_Select(0, 2);
Soft_I2C_Write((hour10 << 4) + hour1);
Soft_I2C_Stop();
}
void incrementM() { // increments minutes and write it to DS1307
min1++;
if (min1 > 9) {
min1 = 0;
min10++;
if (min10 > 5)
min10 = 0;
}
DS1307_Select(0, 0);
Soft_I2C_Write(0); // reset seconds to 0
Soft_I2C_Write((min10 << 4) + min1); // write minutes
Soft_I2C_Stop();
}
void main(){
// pos: current digit position;
// counter1, counter2: used as flag and for repeat functionality for the buttons
// COM[]: drive the common pins for the LED display
byte pos, counter1, counter2, COM[4] = {0b11101111, 0b11110111, 0b11111011, 0b11111101};
CMCON = 0b00000111; // comparator off
TRISA = 0b01100000;
TRISB = 0b00000000;
b1_old = 1;
b2_old = 1;
counter1 = 0;
counter2 = 0;
pos = 0;
Soft_I2C_Init();
DS1307_Init();
while (1) {
DS1307_Select(1, 1); // select reading at address 1
min1 = Soft_I2C_Read(1); // read minutes byte
hour1 = Soft_I2C_Read(0); // read houts byte
Soft_I2C_Stop();
min10 = min1 >> 4;
min1 = min1 & 0b00001111;
hour10 = hour1 >> 4;
hour1 = hour1 & 0b00001111;
if (b1 != b1_old) { // if the button1 is pressed or released
b1_old = b1;
counter1 = 0;
}
if (!b1_old) { // if the button1 is pressed
if (counter1 == 0)
incrementH(); // increment hour
counter1++;
if (counter1 > 50) // this is repeat functionality for the button1
counter1 = 0;
}
if (b2 != b2_old) { // if the button2 is pressed or released
b2_old = b2;
counter2 = 0;
}
if (!b2_old) { // if the button2 is pressed
if (counter2 == 0)
incrementM(); // increment minutes and reset the seconds to 0
counter2++;
if (counter2 > 50) // this is repeat functionality for the button2
counter2 = 0;
}
TRISA = TRISA | 0b00011110; // set all 4 pins as inputs
switch (pos) { // set proper segments high
case 0: PORTB = segments[hour10]; break;
case 1: PORTB = segments[hour1]; break;
case 2: PORTB = segments[min10]; break;
case 3: PORTB = segments[min1]; break;
}
TRISA = TRISA & COM[pos]; // set pin at current position as output
PORTA = PORTA & COM[pos]; // set pin at current position low
pos++; // move to next position
if (pos > 3) pos = 0;
}
}
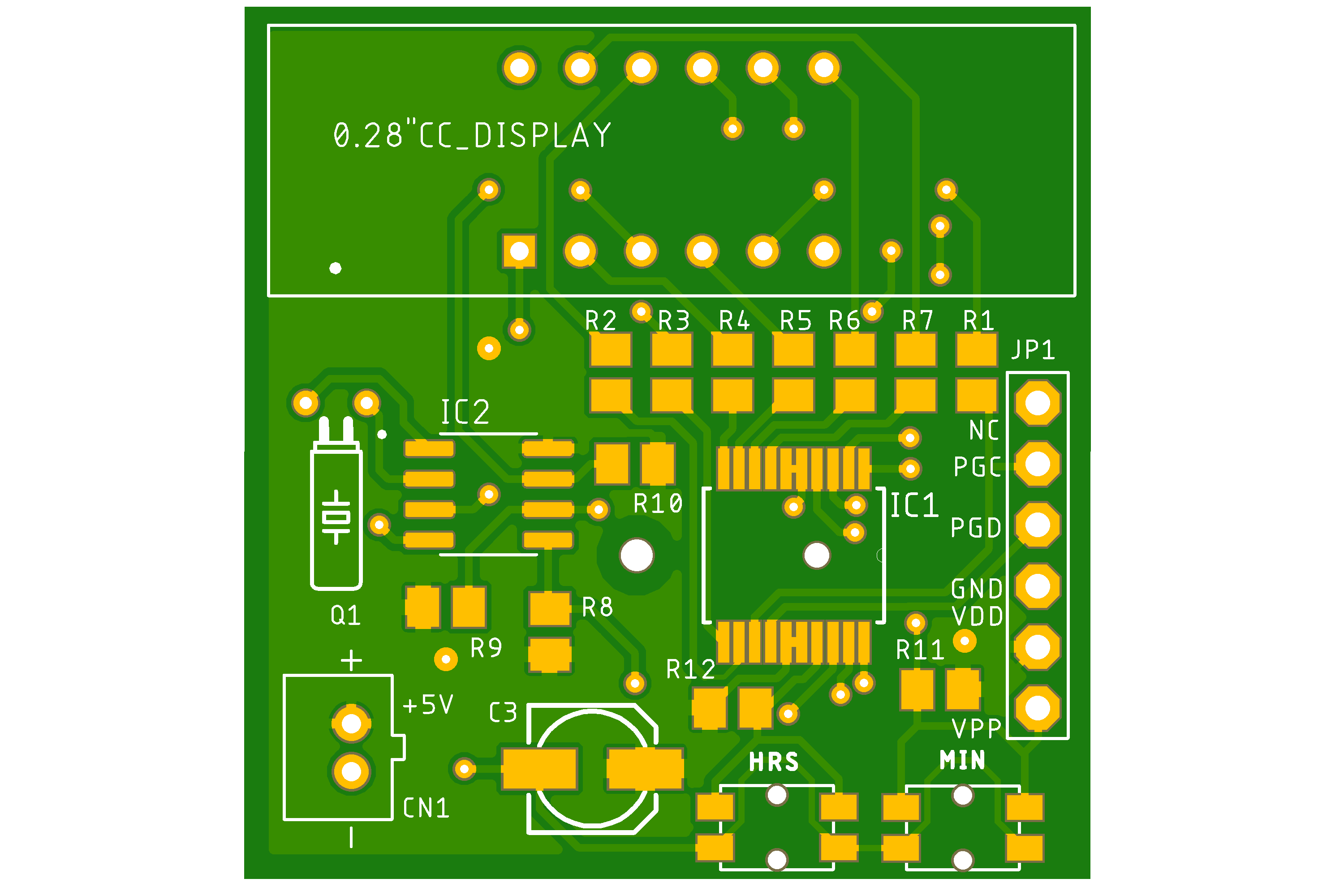
PCB
PCB is designed with Autodesk EAGLE and design files are available in downloads below. The overall dimensions of the board are 35.56 x 36.61 mm and we used almost SMD components.
Spare PCBs are available for shipment around the world. If you would like to get some drop us a line.
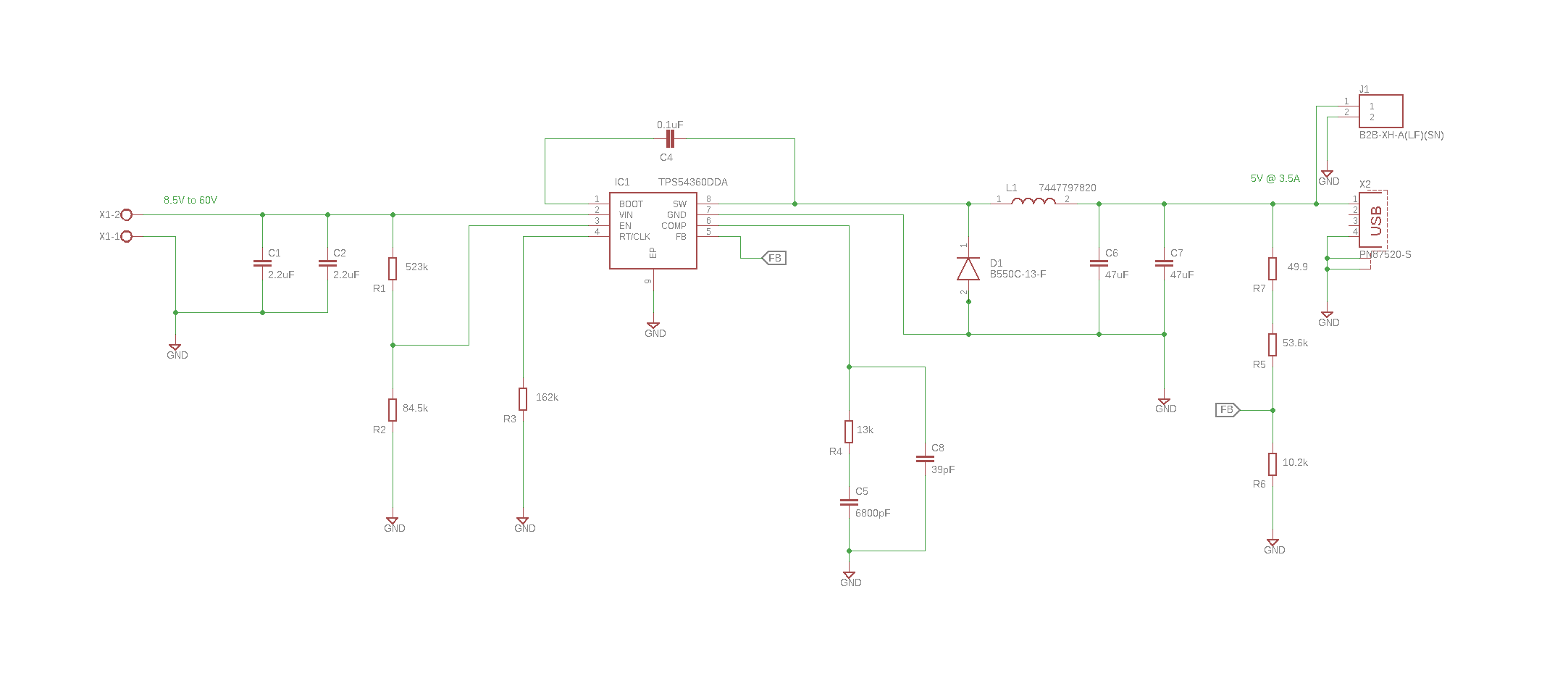
This is a 60V to 5V – 3.5A step down DC-DC converter based on TPS54360B from Texas Instruments. Sample applications are: 12 V, 24 V and 48 V industrial, Automotive and Communications Power Systems. The TPS54360 is a 60V, 3.5A, step down regulator with an integrated high side MOSFET. The device survives load dump pulses up to 65V per ISO 7637. Current mode control provides simple external compensation and flexible component selection. A low ripple pulse skip mode reduces the no load supply current to 146 μA. Shutdown supply current is reduced to 2 μA when the enable pin is pulled low.
Under-voltage lockout is internally set at 4.3 V but can be increased using the enable pin. The output voltage start up ramp is internally controlled to provide a controlled start up and eliminate overshoot. A wide switching frequency range allows either efficiency or external component size to be optimized. Frequency fold back and thermal shutdown protects internal and external components during an overload condition.
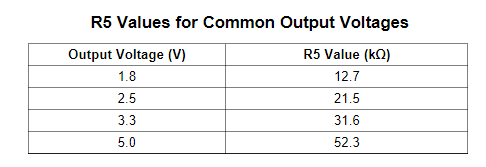
Note: The output voltage is set by a resistor divider from the output node to the FB terminal. It is recommended to use 1% tolerance or better divider resistors, choose R5, R6 for other output voltages.
It is strongly recommended to use adequate air flow over the board to ensure it doesn’t go at thermal shutdown. See thermal profile below.
Setting Output Voltage
The following table lists the R5 values for some common output voltages assuming R6= 10.0kΩ
Features
Supply Input 8.5V-60V
Output 5V (Output Voltage adjustable with R5, R6)
Output Current 3.5A
100 kHz to 2.5 MHz Switching Frequency
Optional JST connector for 5V Fan
Current Mode Control DC-DC Converter
Integrated 90-mΩ High Side N-Channel MOSFET
High Efficiency at Light Loads with Pulse Skipping Eco-mode™
Low Dropout at Light Loads with Integrated BOOT Recharge FET
146 μA Operating Quiescent Current
1 µA Shutdown Current
Internal Soft-Start
Accurate Cycle-by-Cycle Current Limit
Thermal, Overvoltage, and Frequency Fold back Protection
PCB Dimensions 55.50mm x 24.64mm
Schematic
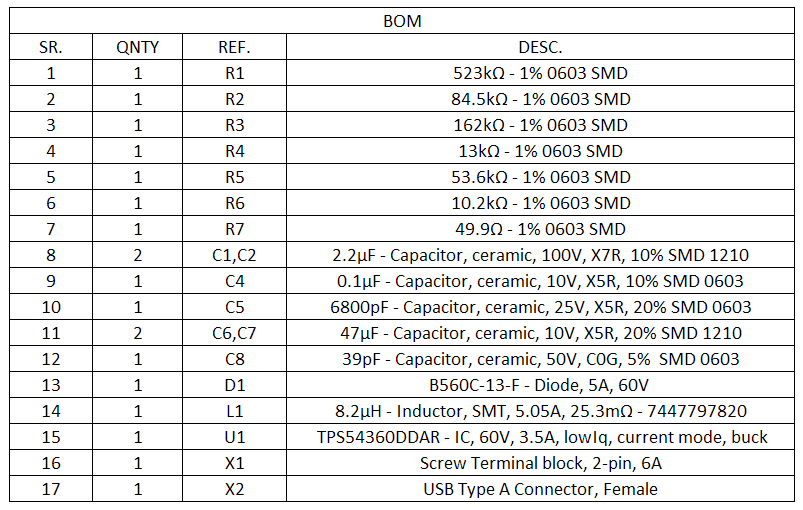
Parts List
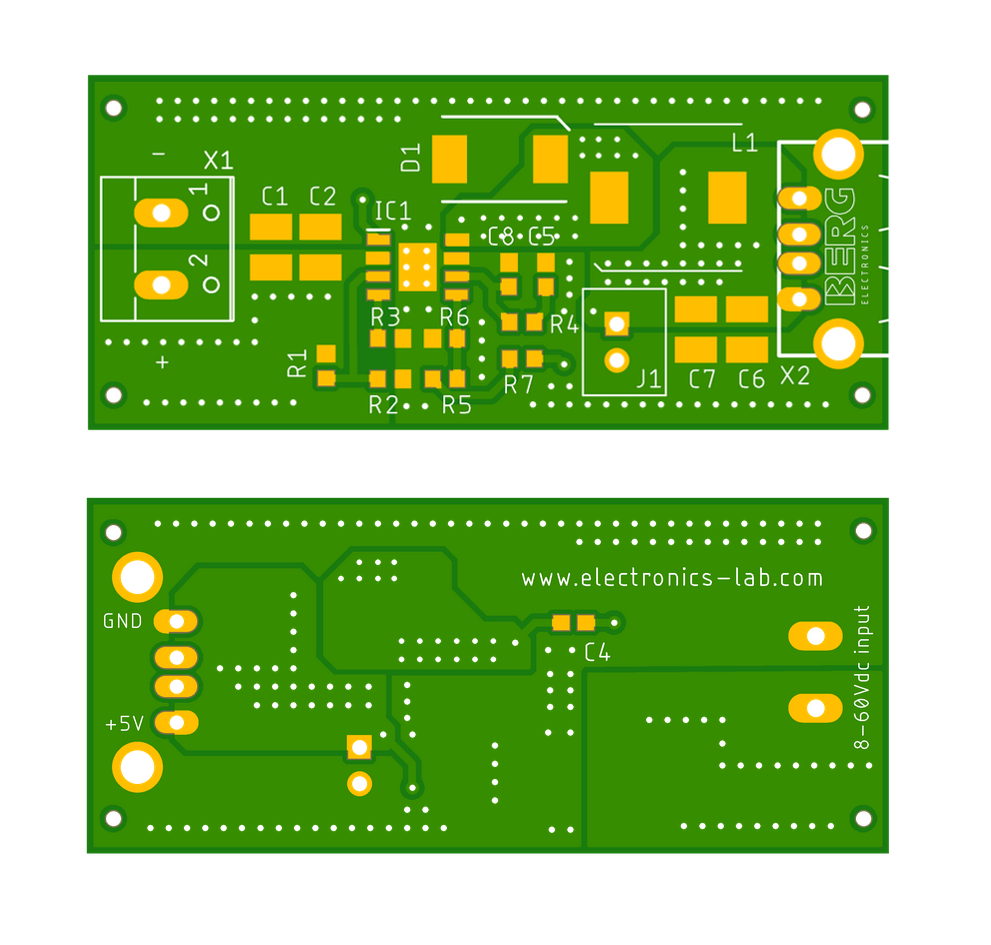
PCB
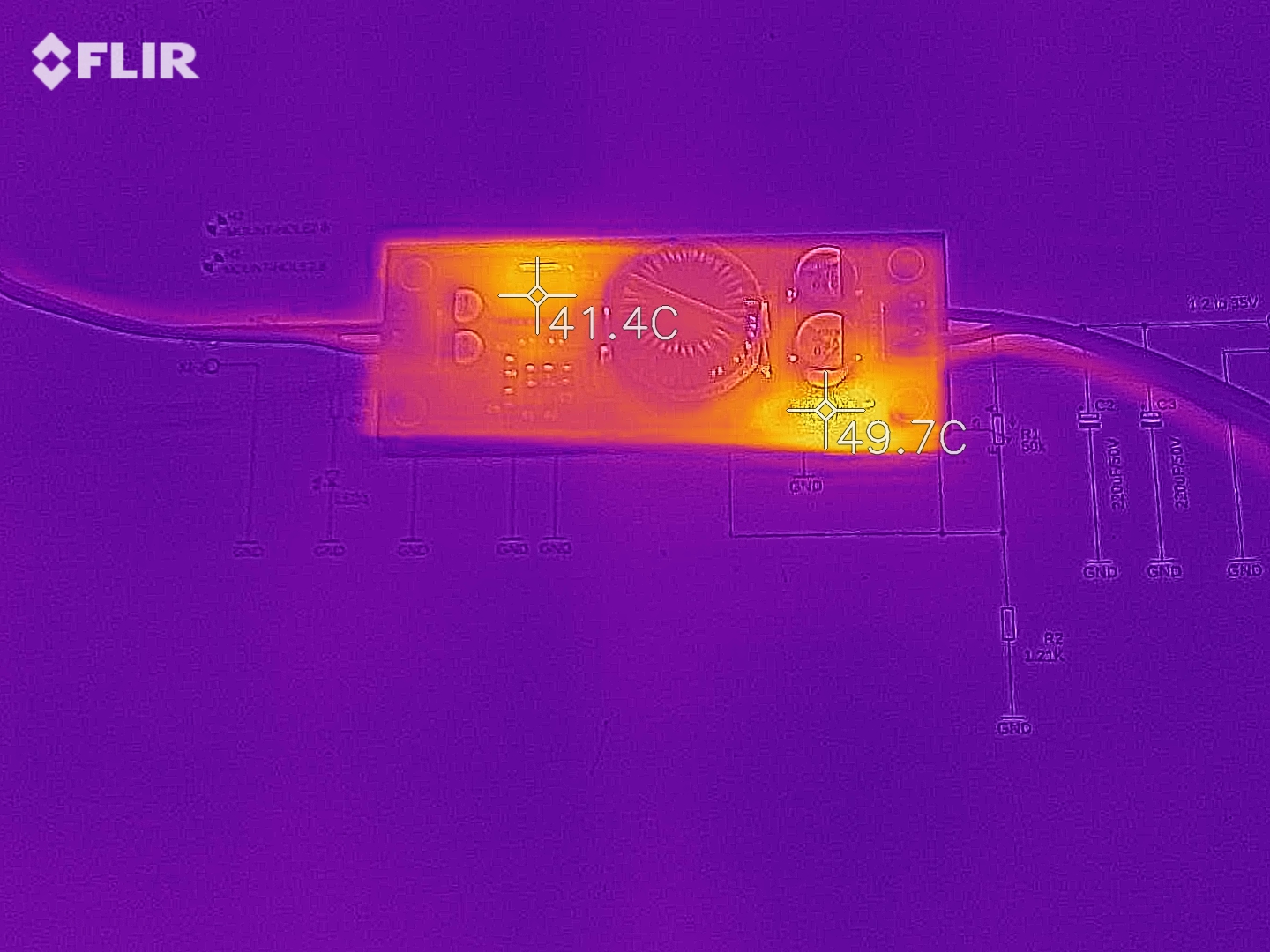
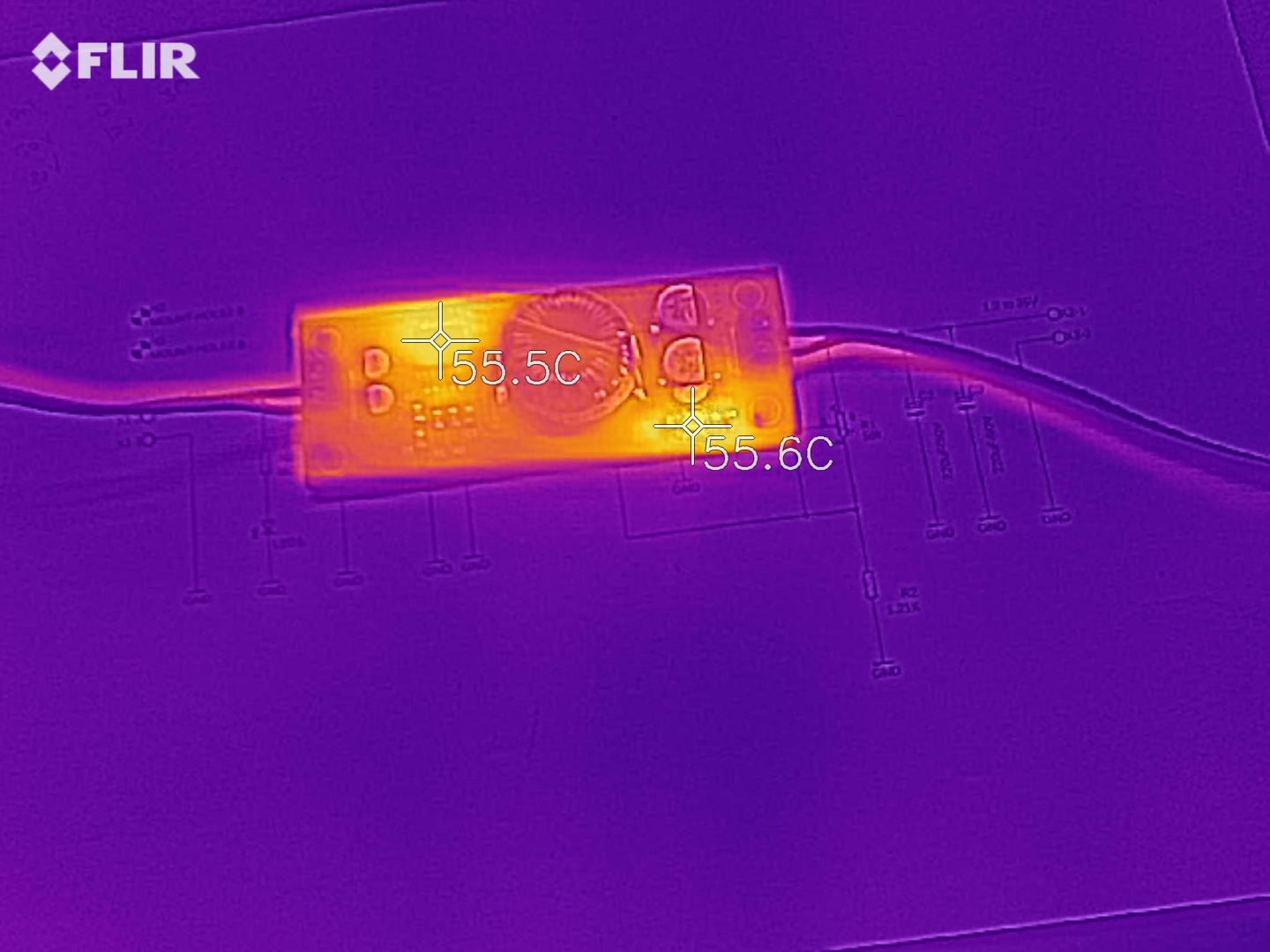
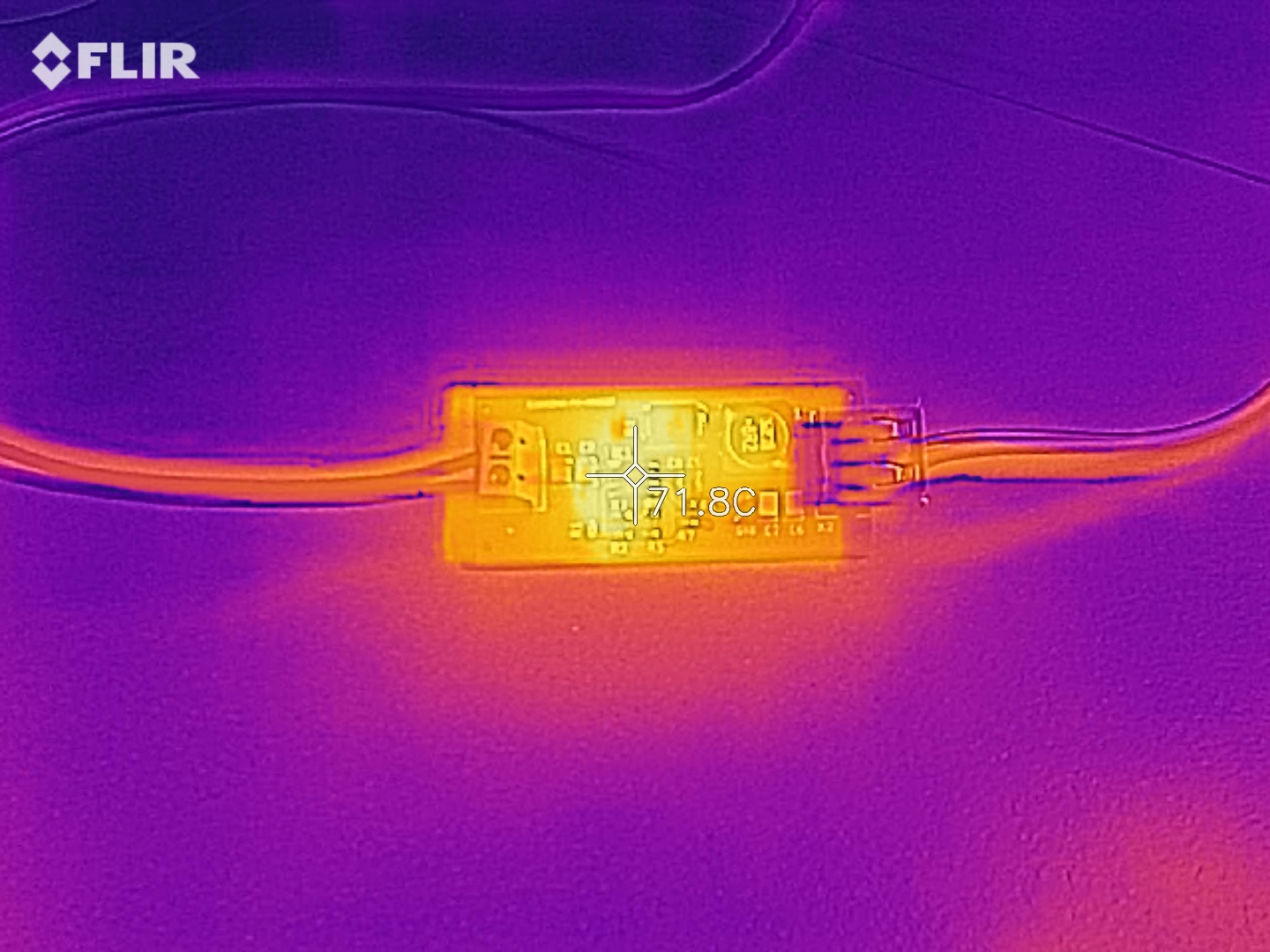
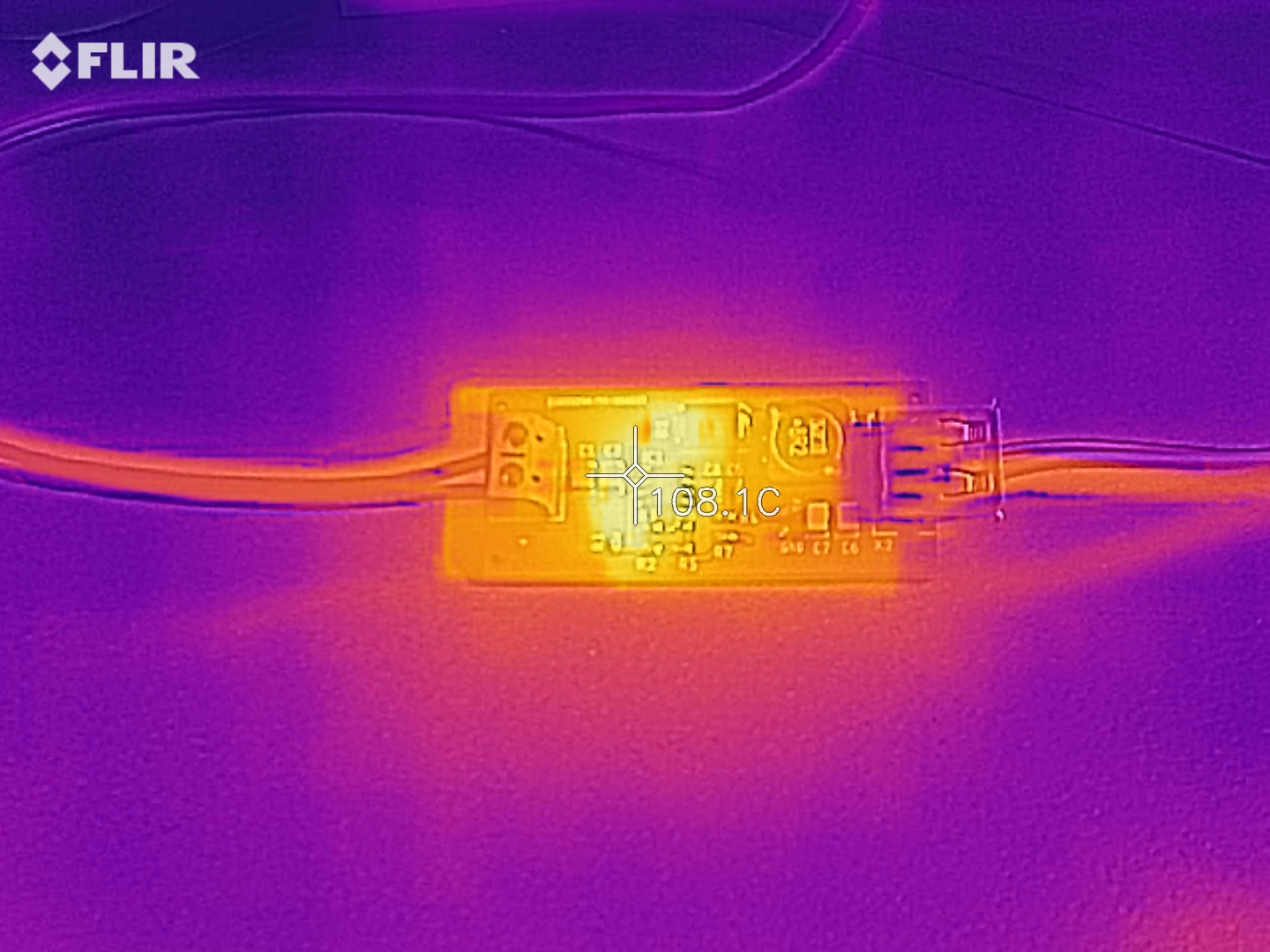
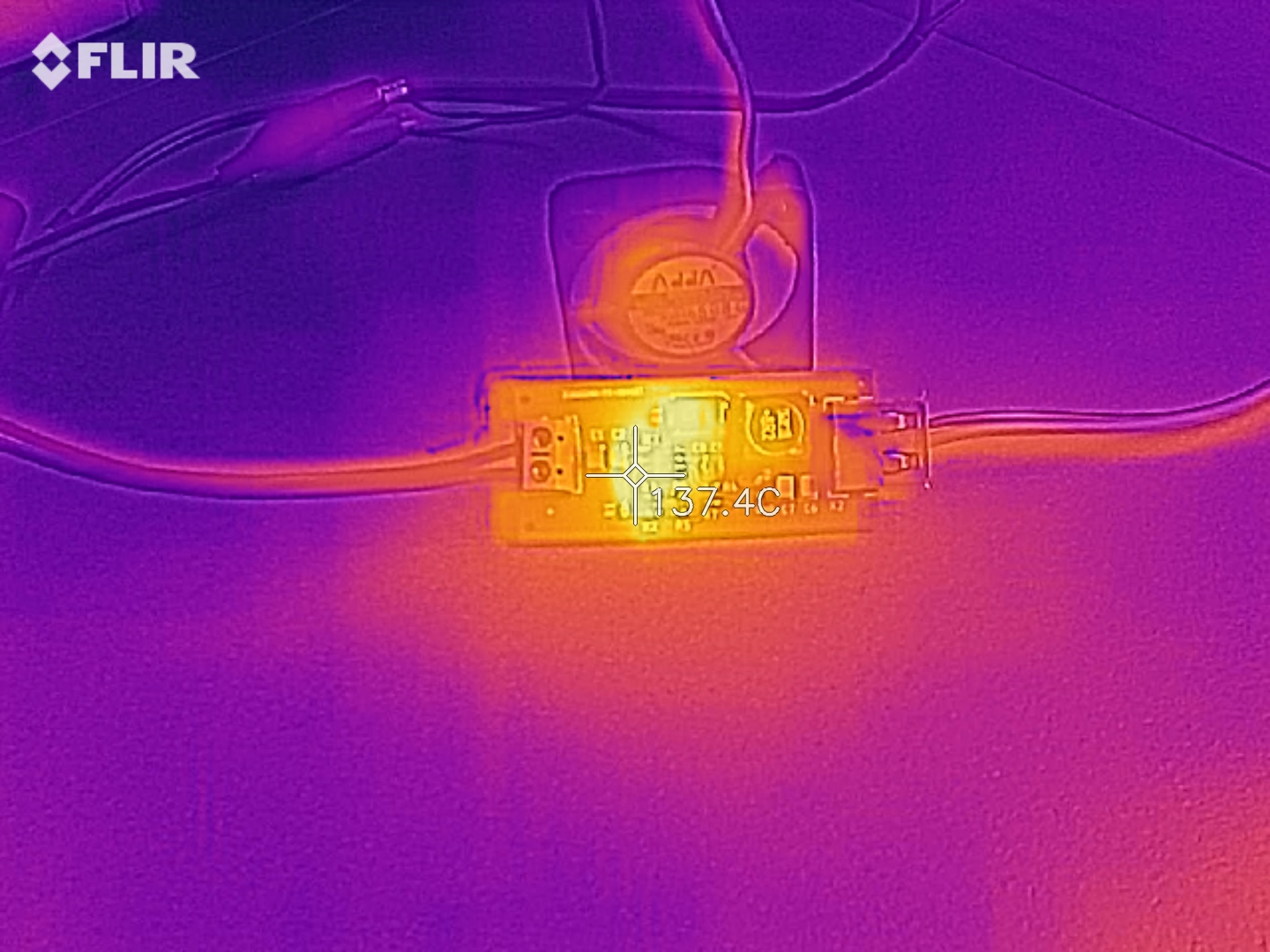
Thermal Image
You can see on the thermal images below that at 60V input – 5V @2A output the IC gets too hot (>105ºC) and if we go for higher outputs (2.5-3A) the IC gets in thermal cut-off. To avoid this situation you can use a small 5V FAN to blow air on the board or probably use a heatsink attached to the board.
60V input – 5V @1A output60V input – 5V @2A output60V input – 5V @3A output cooled with a small FAN
Measurements
The efficiency is calculated based on the (Pout/Pin)*100%. For 60V input and 5V @3A output the input current is 0.32A, so Pin=19.38W. Pout=5V*3A=15W, so e=77.39% with Pdis = 4.58W
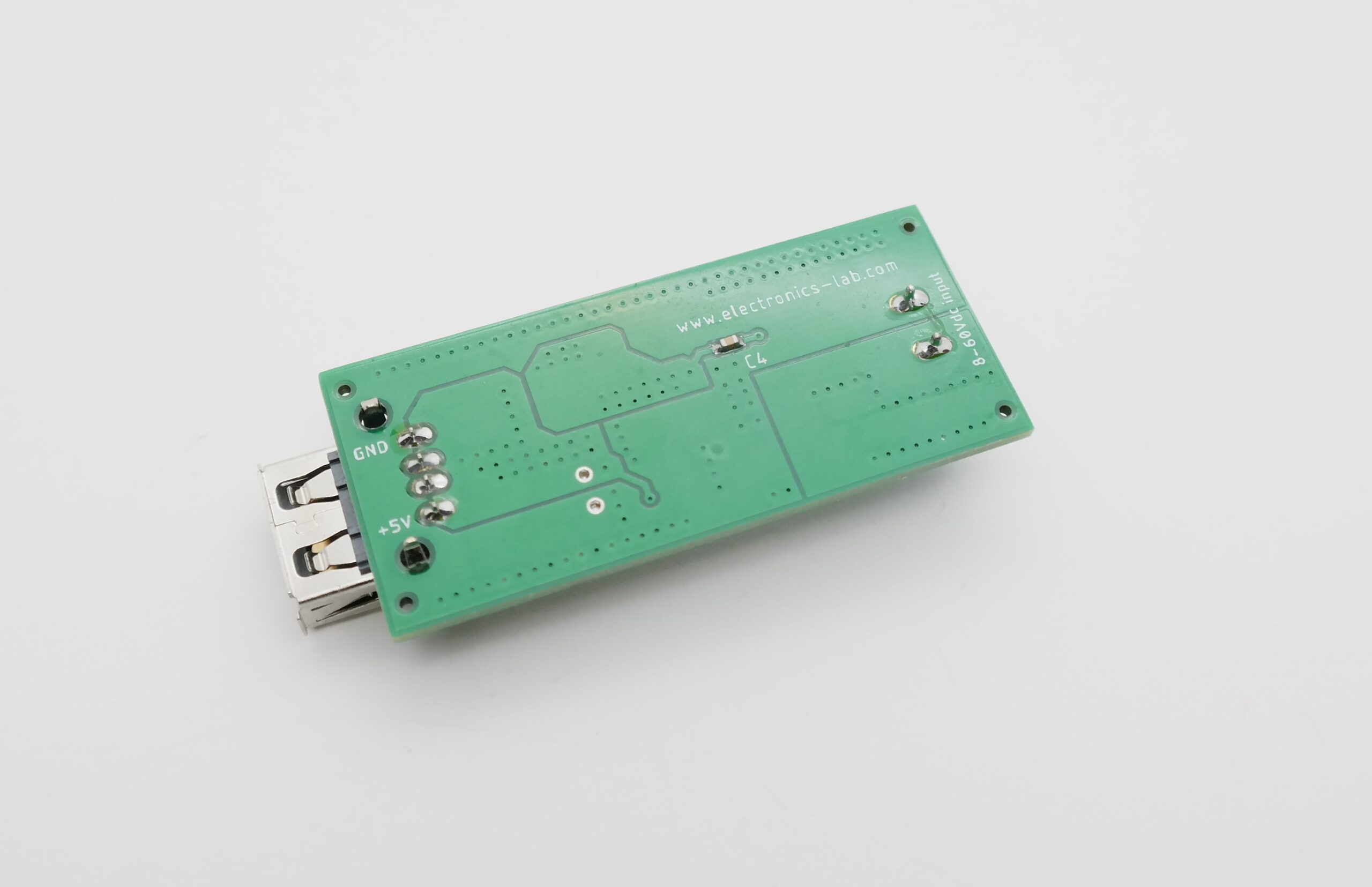
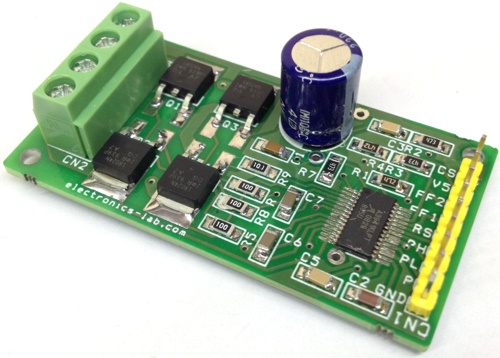
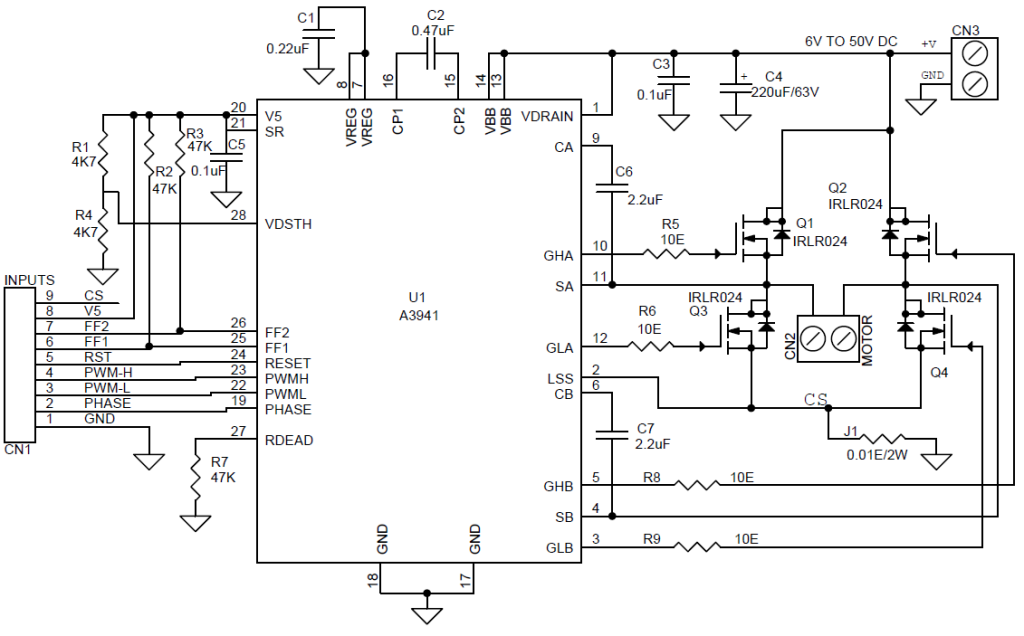
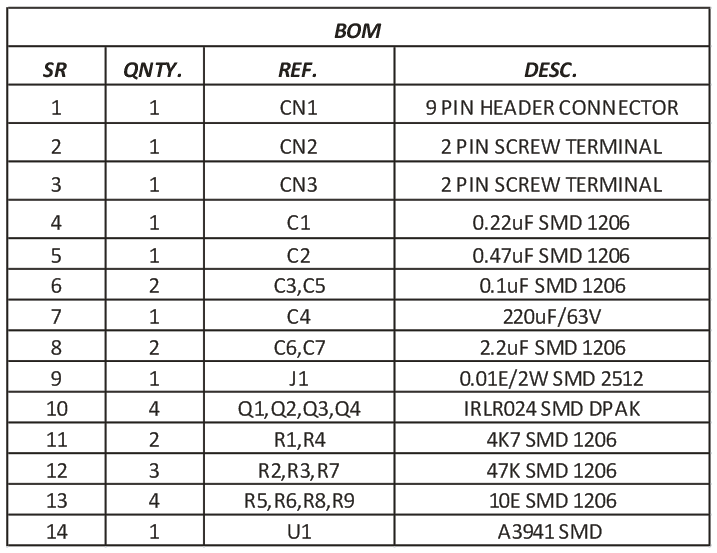
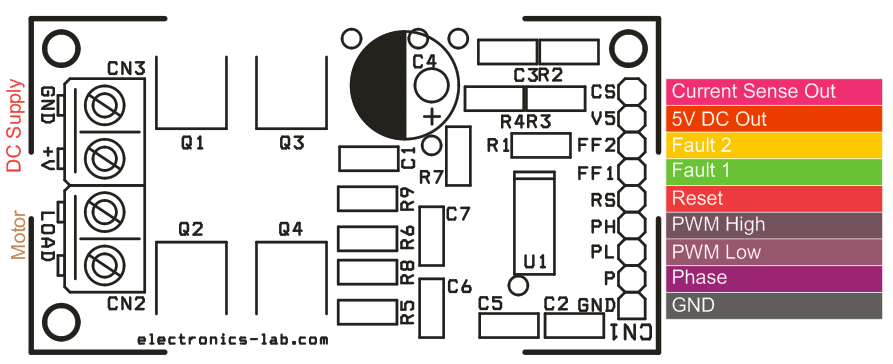
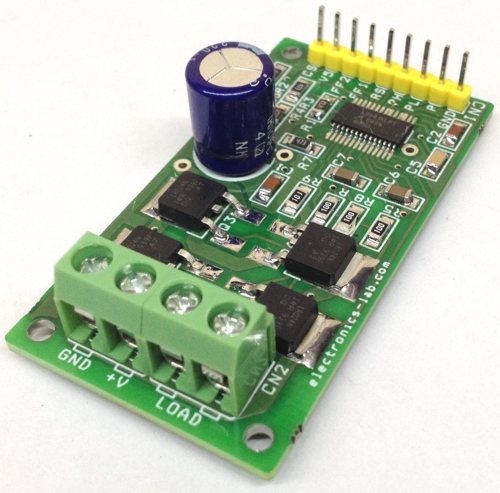
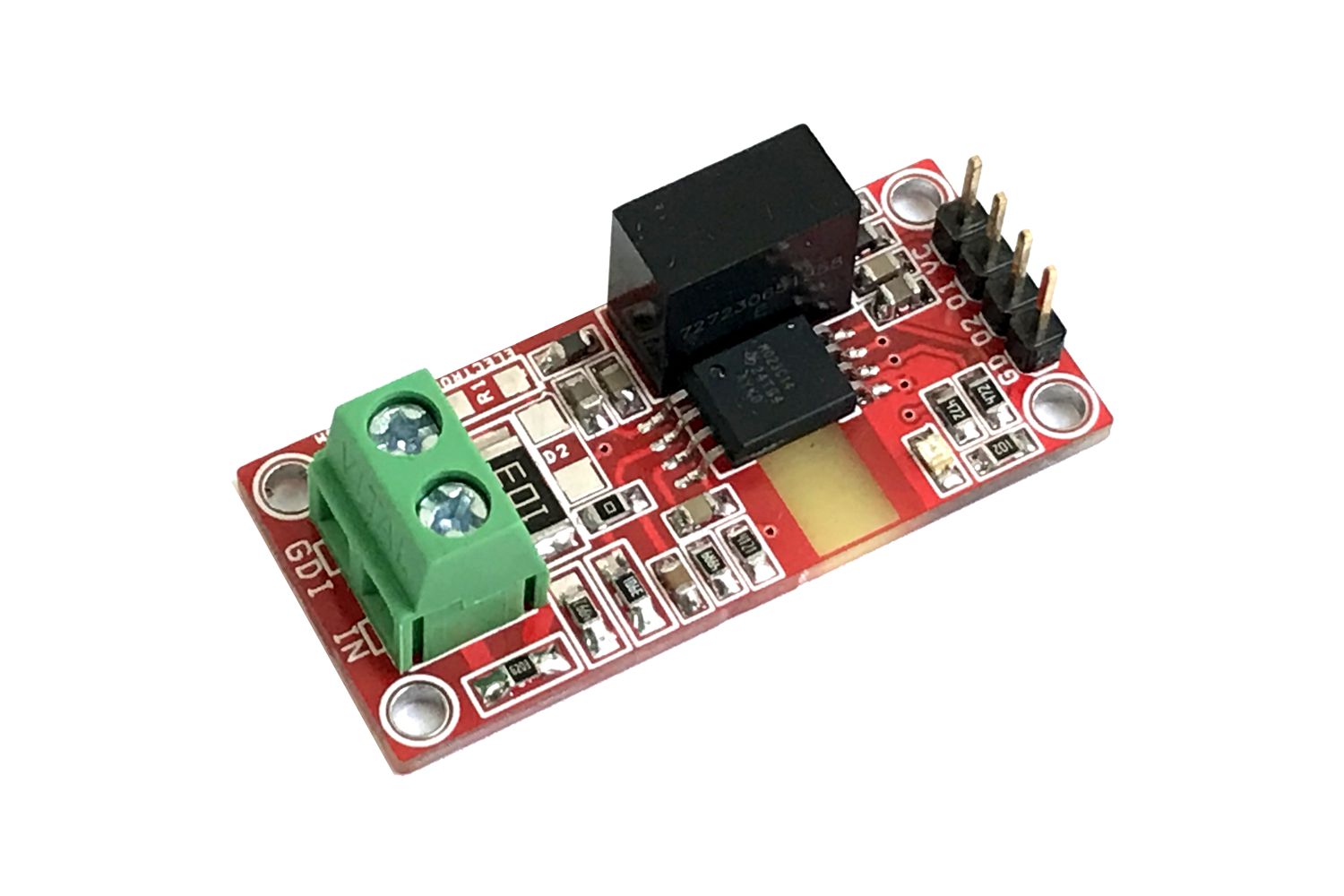
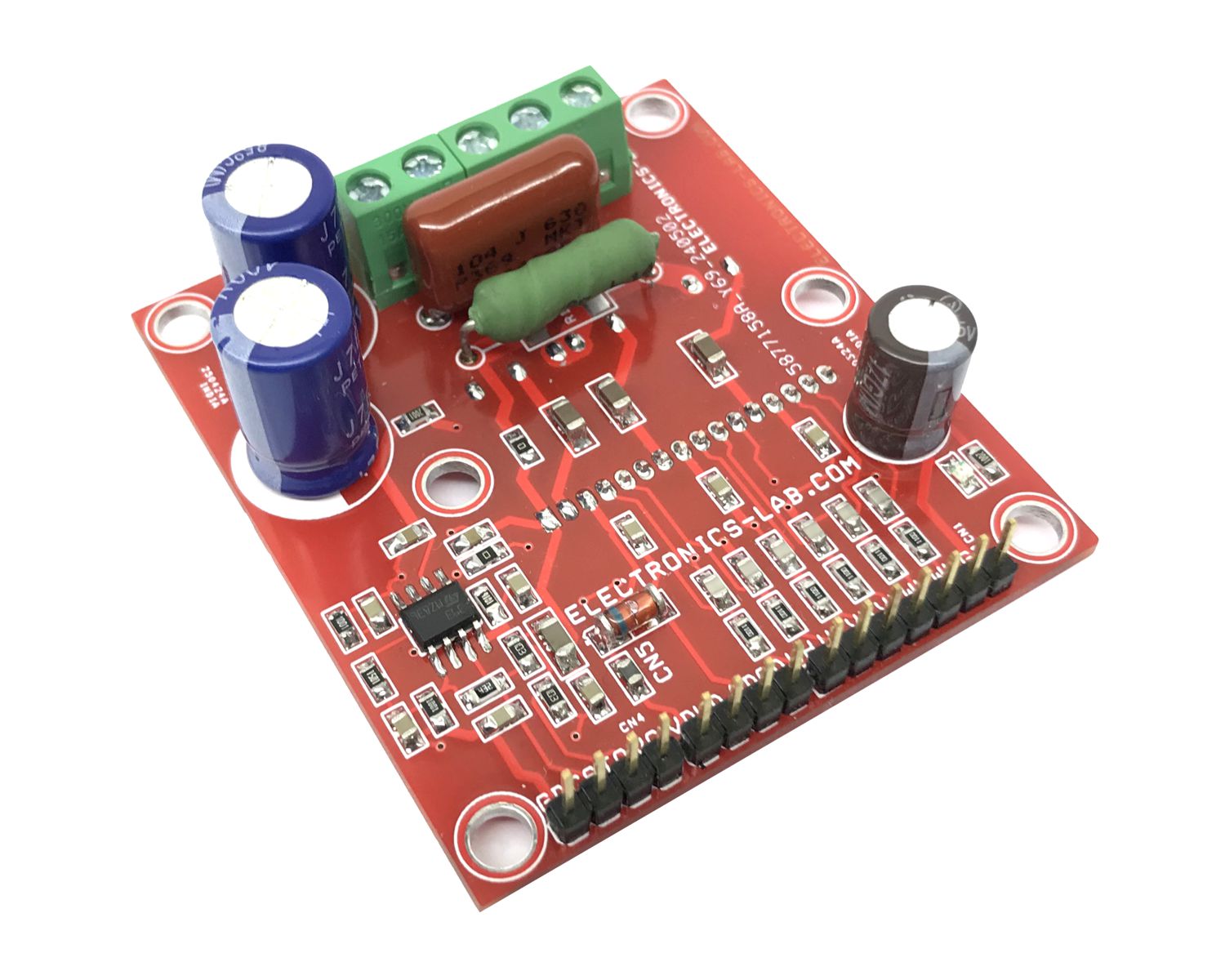
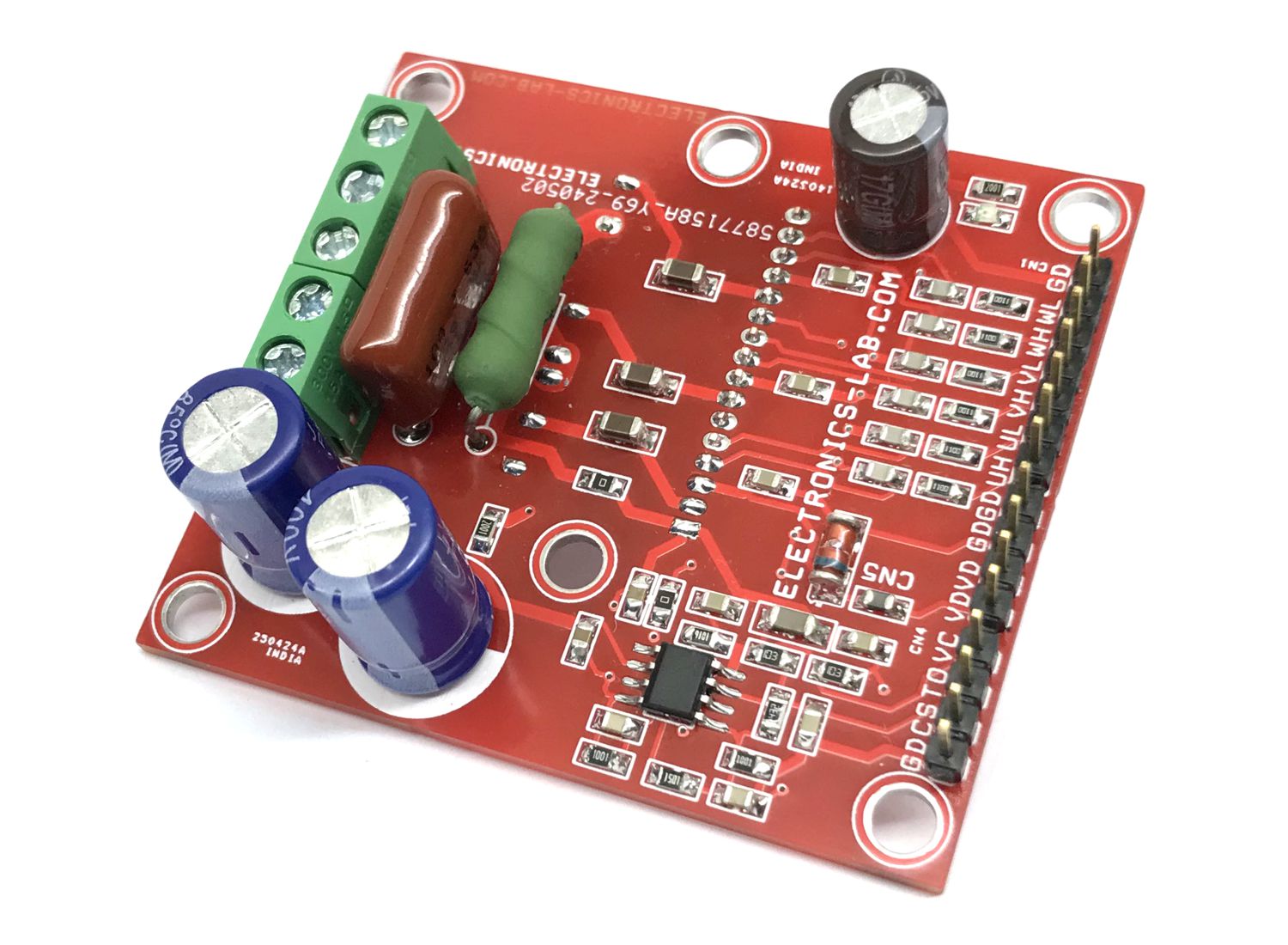
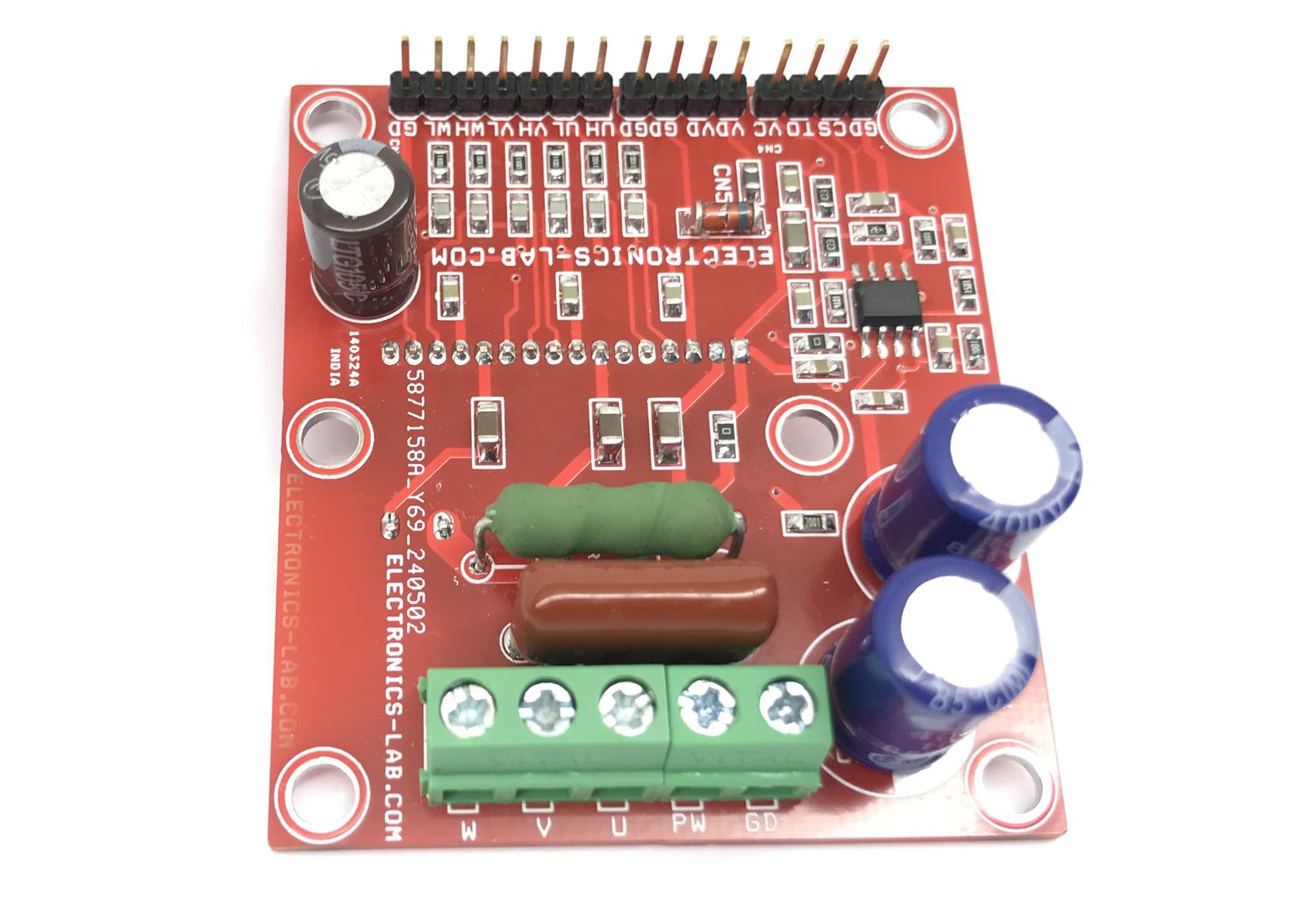
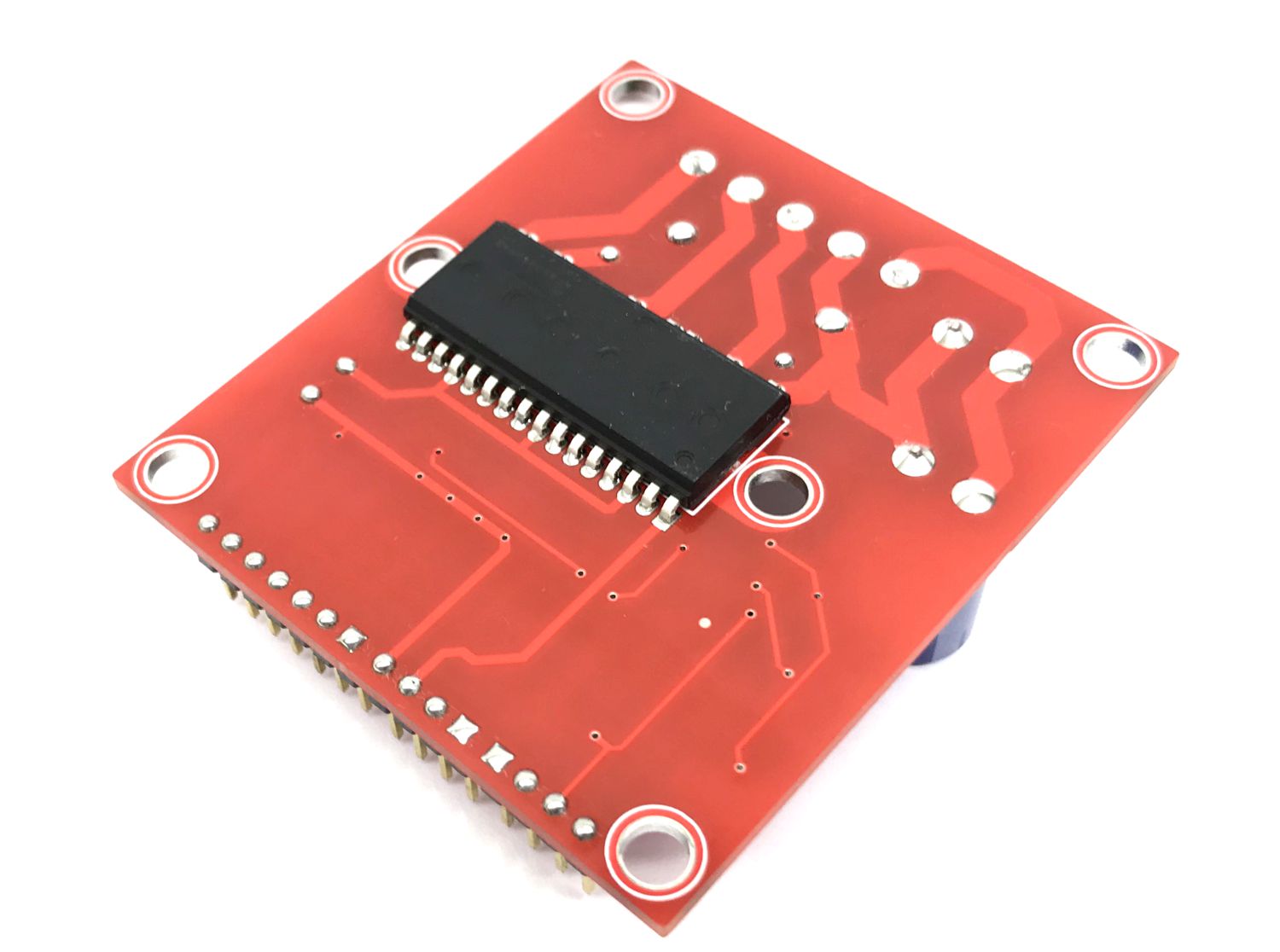
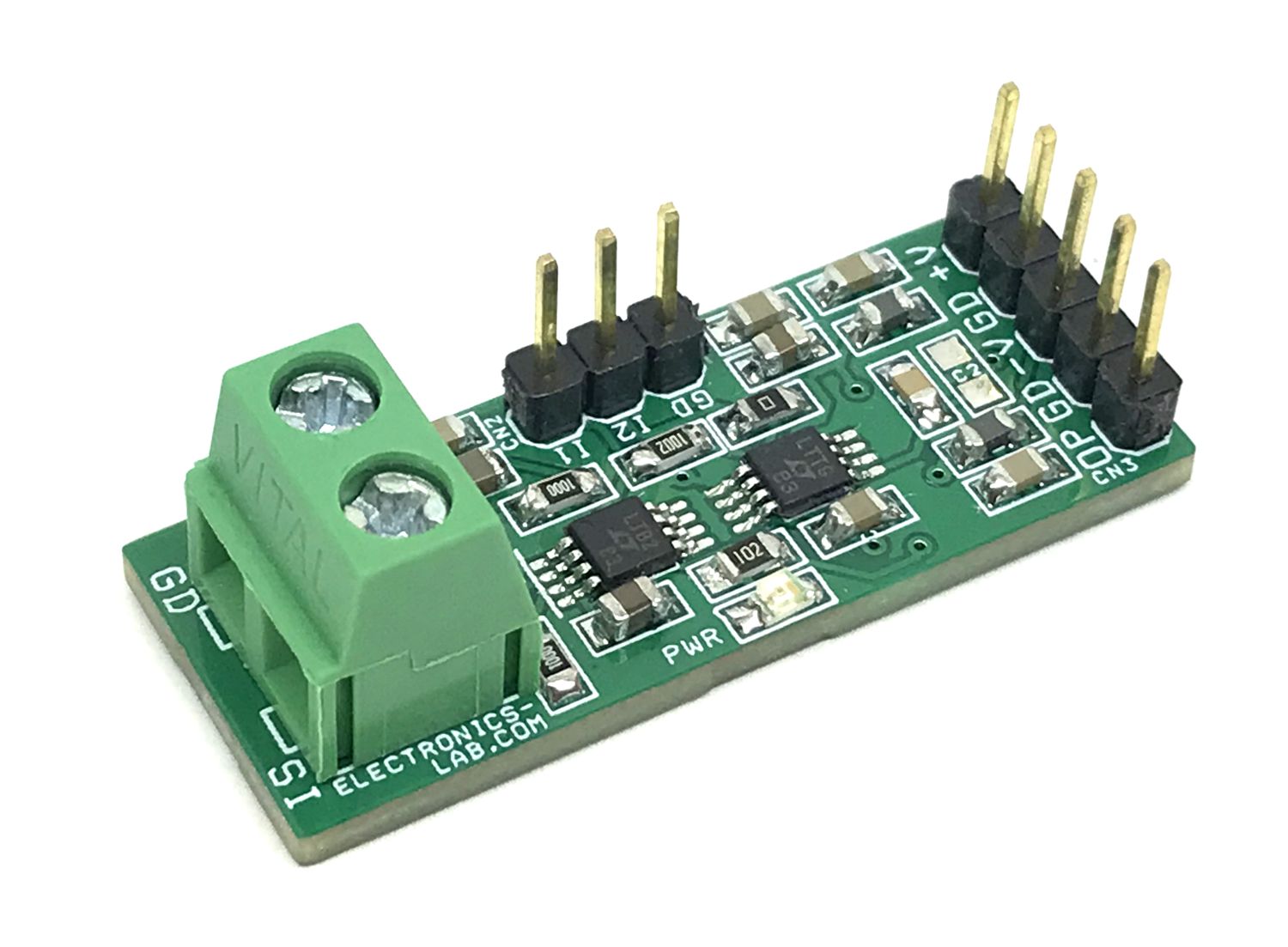
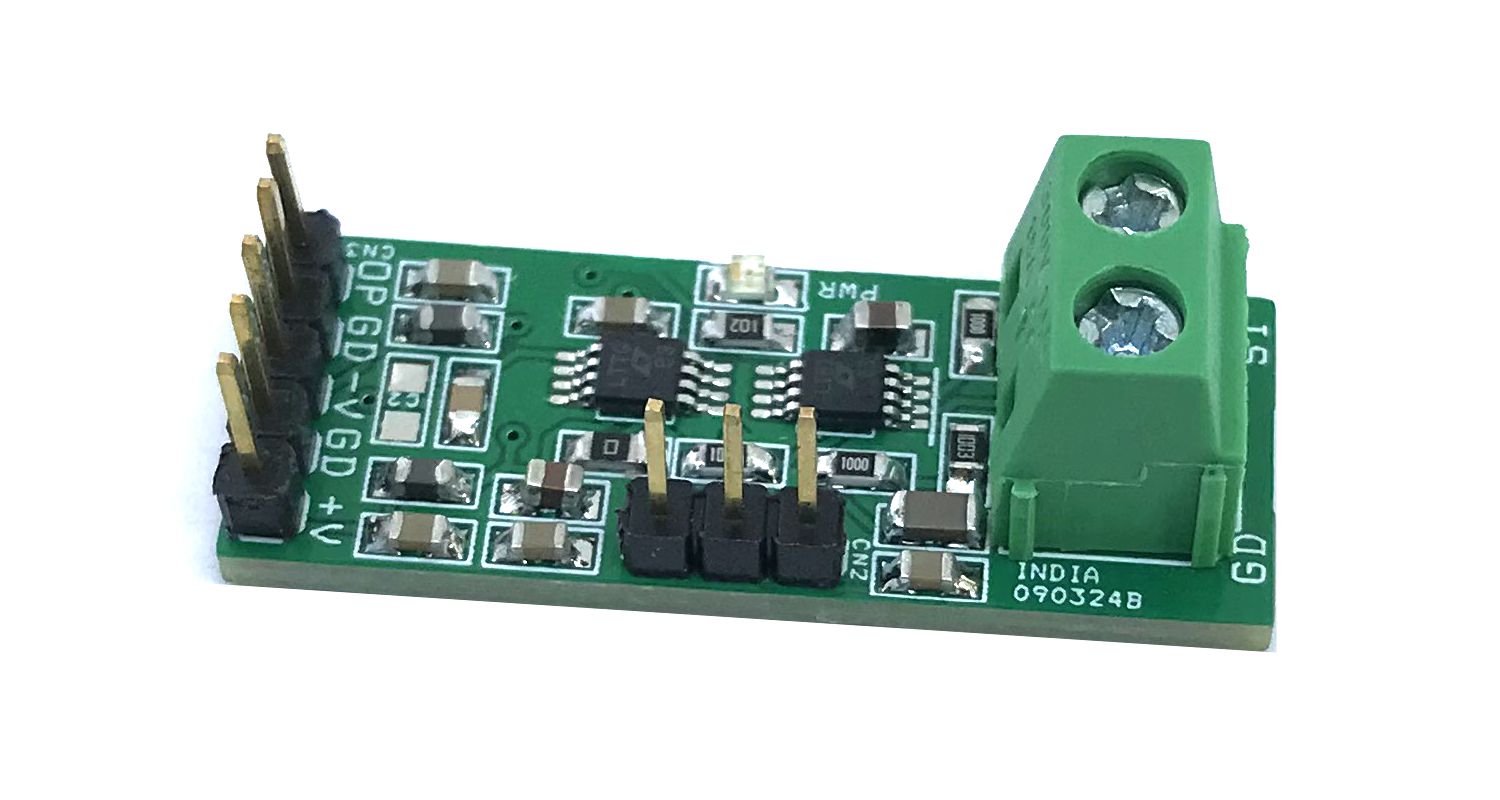
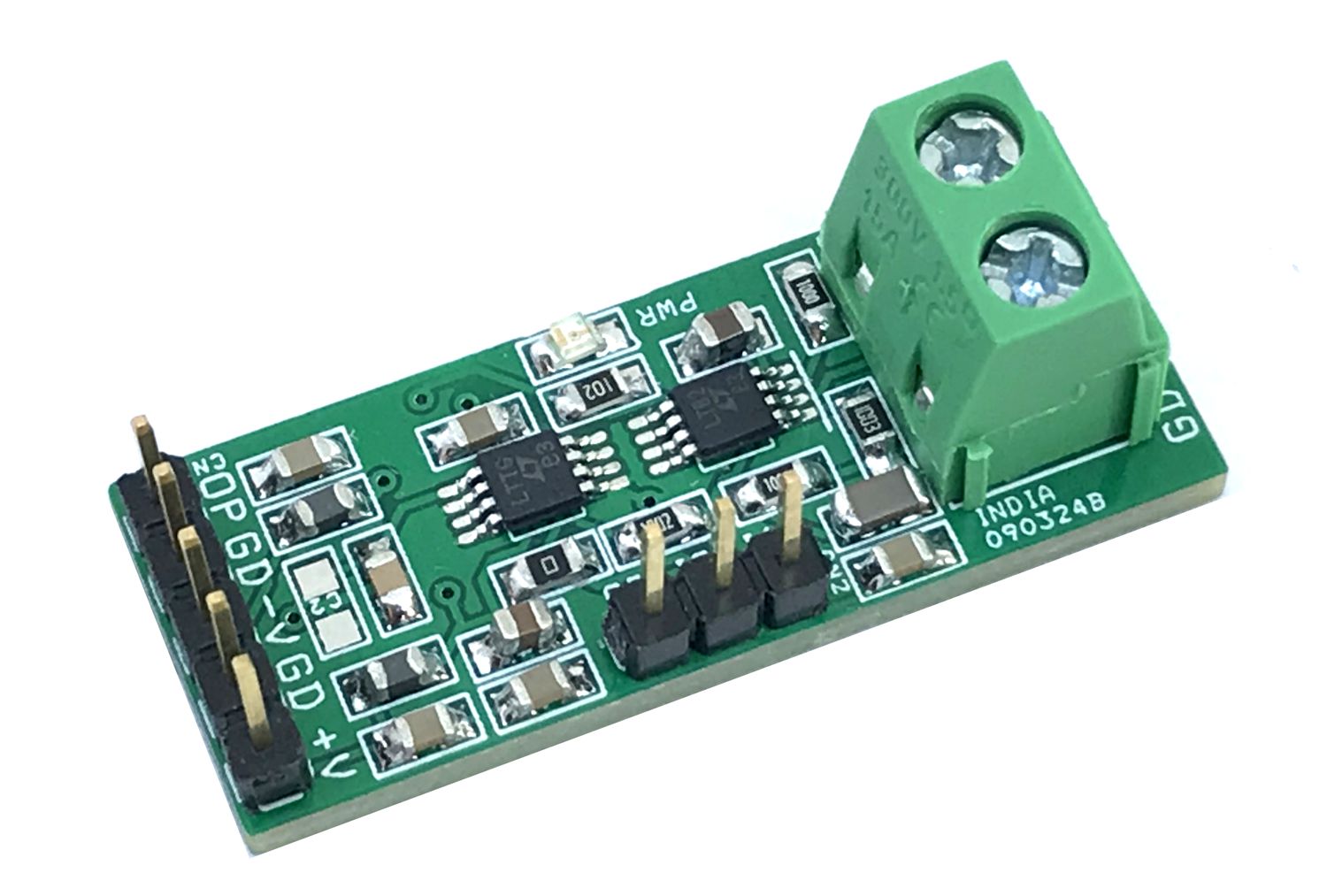
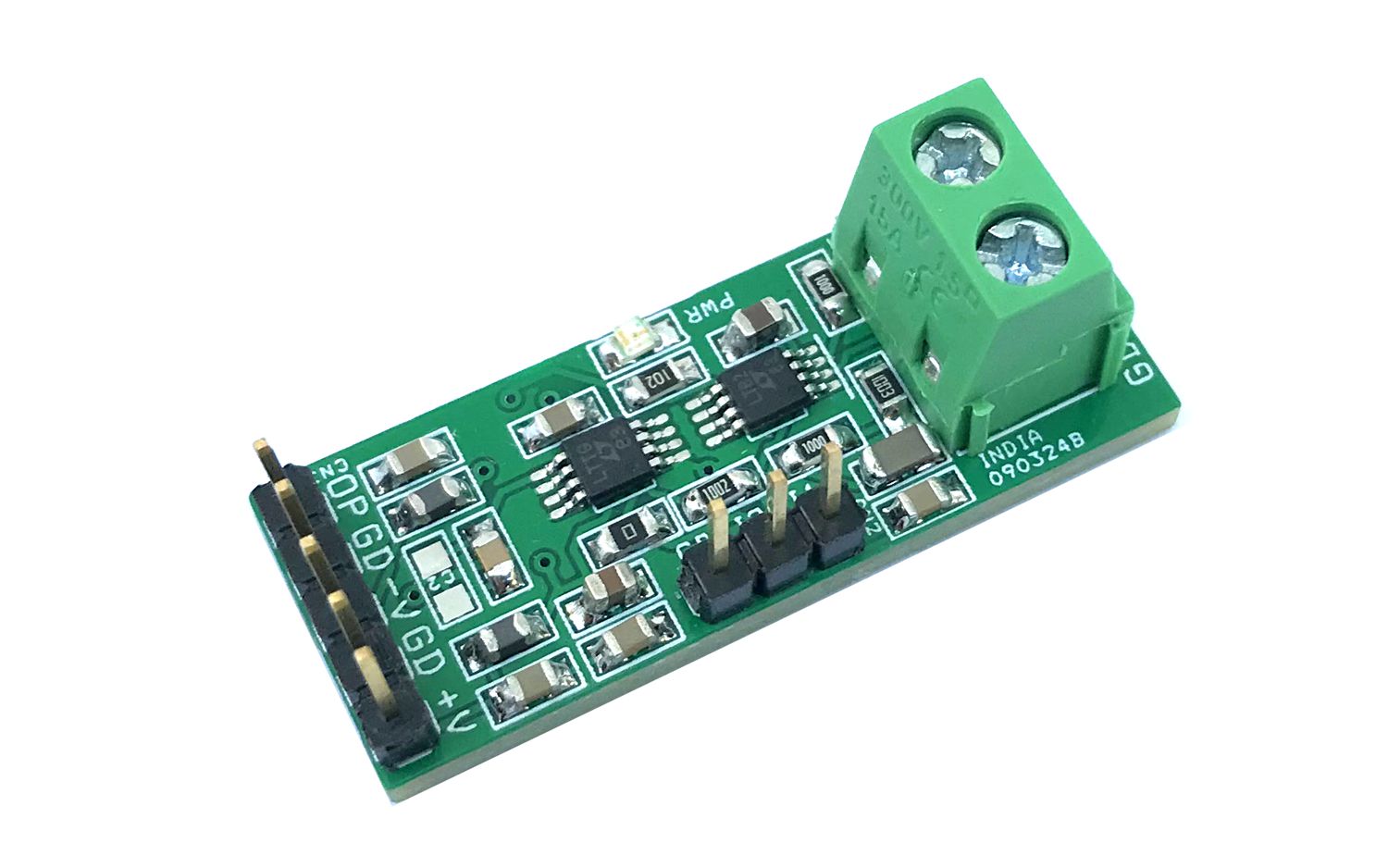
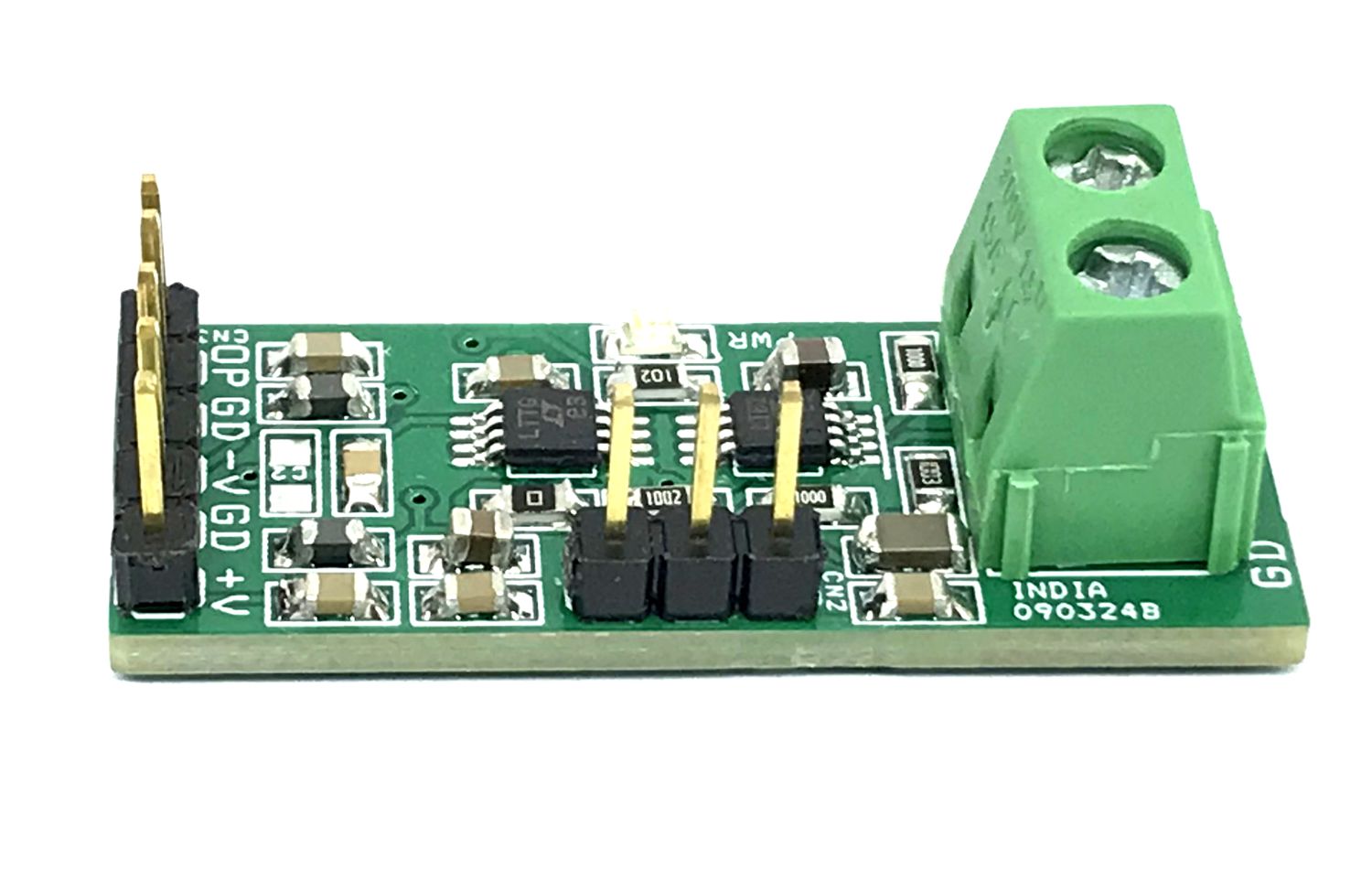
This tiny board is designed to drive a bidirectional DC brushed motor of large current. DC supply is up to 50V DC. A3941 gate driver IC and 4X N Channel Mosfet IRLR024 used as H-Bridge. The project can handle a load of up to 10A. Screw terminals are provided to connect the load and load supply, and 9 Pin header connector is provided for easy interface with the microcontroller. An on board, shunt resistor provides current feedback.
The A3941 is a full-bridge controller for use with external N-channel power MOSFETs and is specifically designed for automotive applications with high-power inductive loads, such as brush DC motors. A unique charge pump regulator provides full (>10 V) gate drive for battery voltages down to 7 V and allows the A3941 to operate with a reduced gate drive, down to 5.5 V. A bootstrap capacitor is used to provide the above-battery supply voltage required for N-channel MOSFETs. An internal charge pump for the high-side drive allows DC (100% duty cycle) operation.
The full bridge can be driven in fast or slow decay modes using diode or synchronous rectification. In the slow decay mode, current recirculation can be through the high-side or the low side FETs. The power FETs are protected from shoot-through by resistor R7 adjustable dead time. Integrated diagnostics provide an indication of under voltage, over temperature, and power bridge faults, and can be configured to protect the power MOSFETs under most short circuit conditions.
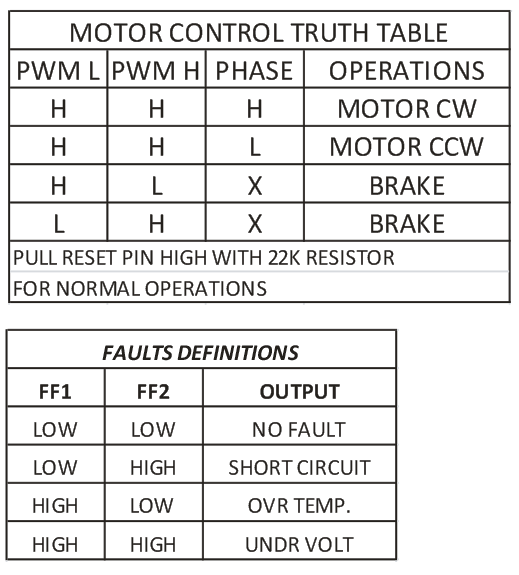
The A3941 is a full-bridge MOSFET driver (pre-driver) requiring a single unregulated supply of 7 to 50 V. It includes an integrated 5 V logic supply regulator. The four high current gate drives are capable of driving a wide range of N-channel power MOSFETs, and are configured as two high-side drives and two low-side drives. The A3941 provides all the necessary circuits to ensure that the gate-source voltage of both high-side and low-side external FETs are above 10 V, at supply voltages down to 7 V. For extreme battery voltage drop conditions, correct functional operation is guaranteed at supply voltages down to 5.5 V, but with a reduced gate drive voltage. The A3941 can be driven with a single PWM input from a Microcontroller and can be configured for fast or slow decay. Fast decay can provide four-quadrant motor control, while slow decay is suitable for two-quadrant motor control or simple inductive loads. In slow decay, current recirculation can be through the high-side or the low-side MOSFETs. In either case, bridge efficiency can be enhanced by synchronous rectification. Cross conduction (shoot through) in the external bridge is avoided by an adjustable dead time. A low-power sleep mode allows the A3941, the power bridge, and the load to remain connected to a vehicle battery supply without the need for an additional supply switch. The A3941 includes a number of protection features against under voltage, over temperature, and Power Bridge faults. Fault states enable responses by the device or by the external controller, depending on the fault condition and logic settings. Two fault flag outputs, FF1 and FF2, are provided to signal detected faults to an external controller.
Features
High current gate drive for N-channel MOSFET full bridge
High-side or low-side PWM switching
Charge pump for low supply voltage operation
Top-off charge pump for 100% PWM
Cross-conduction protection with adjustable dead time
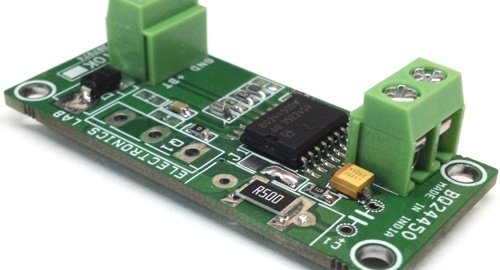
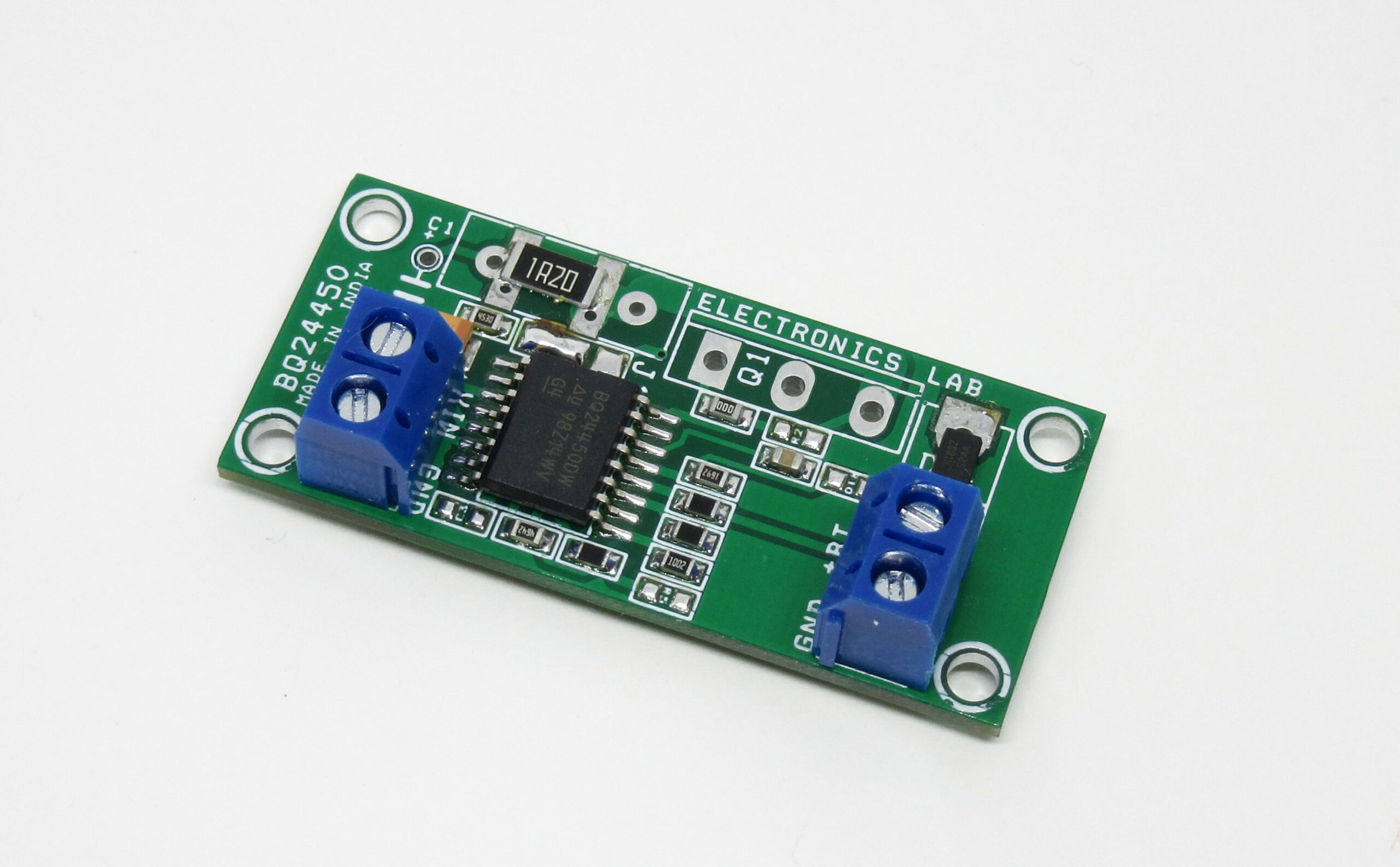
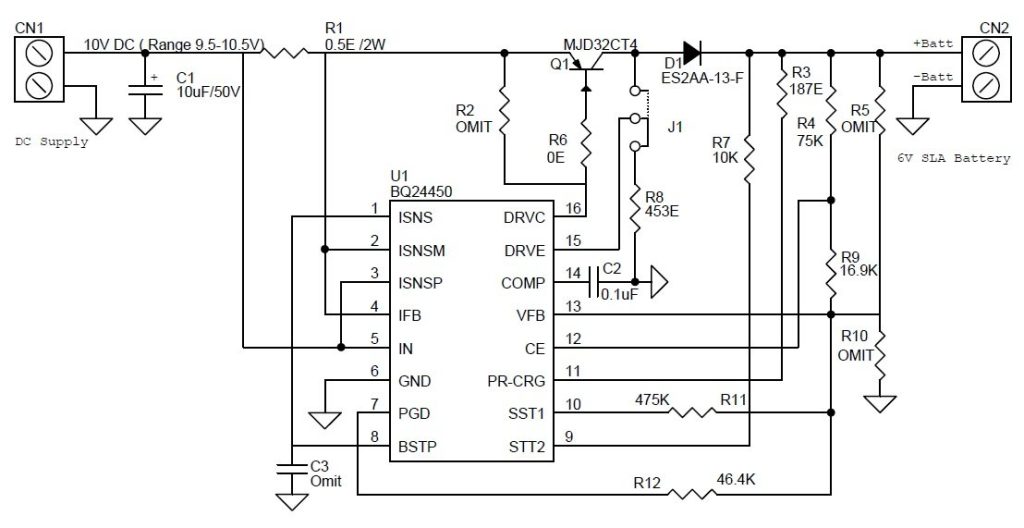
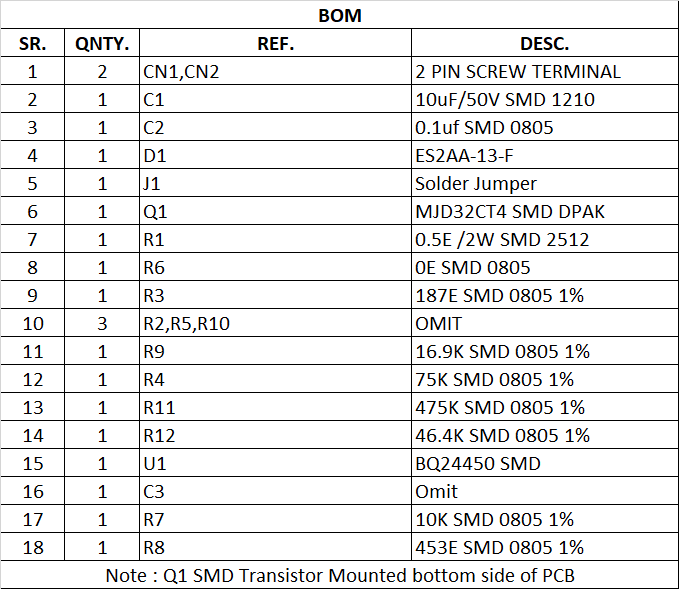
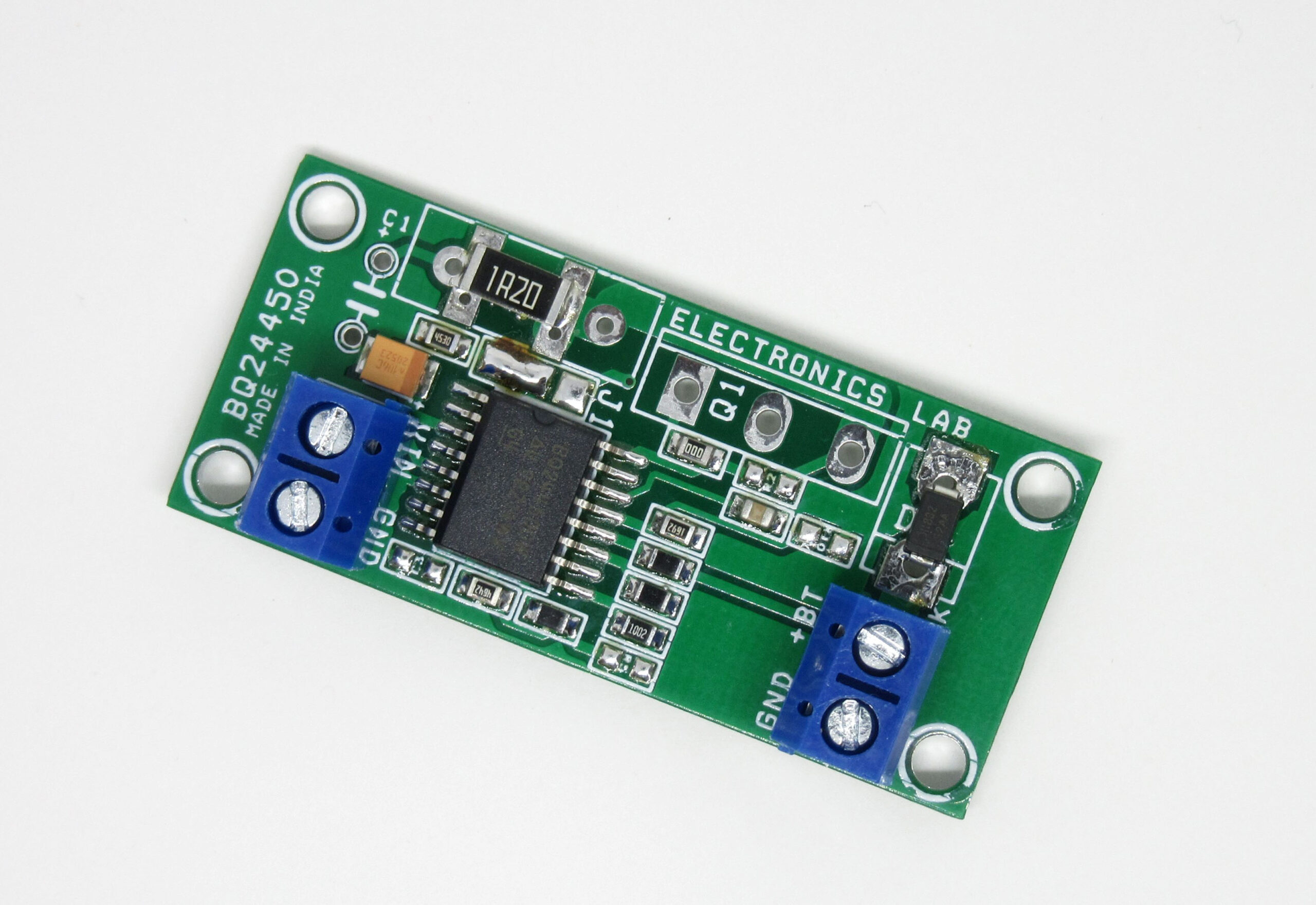
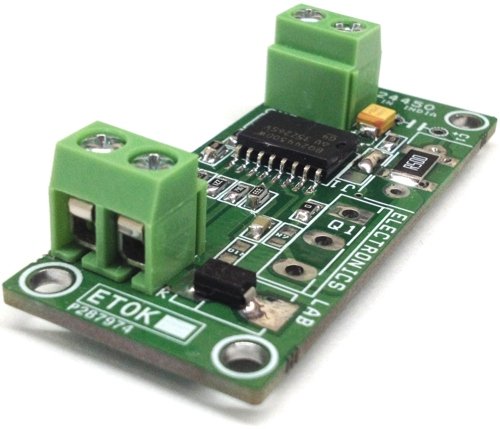
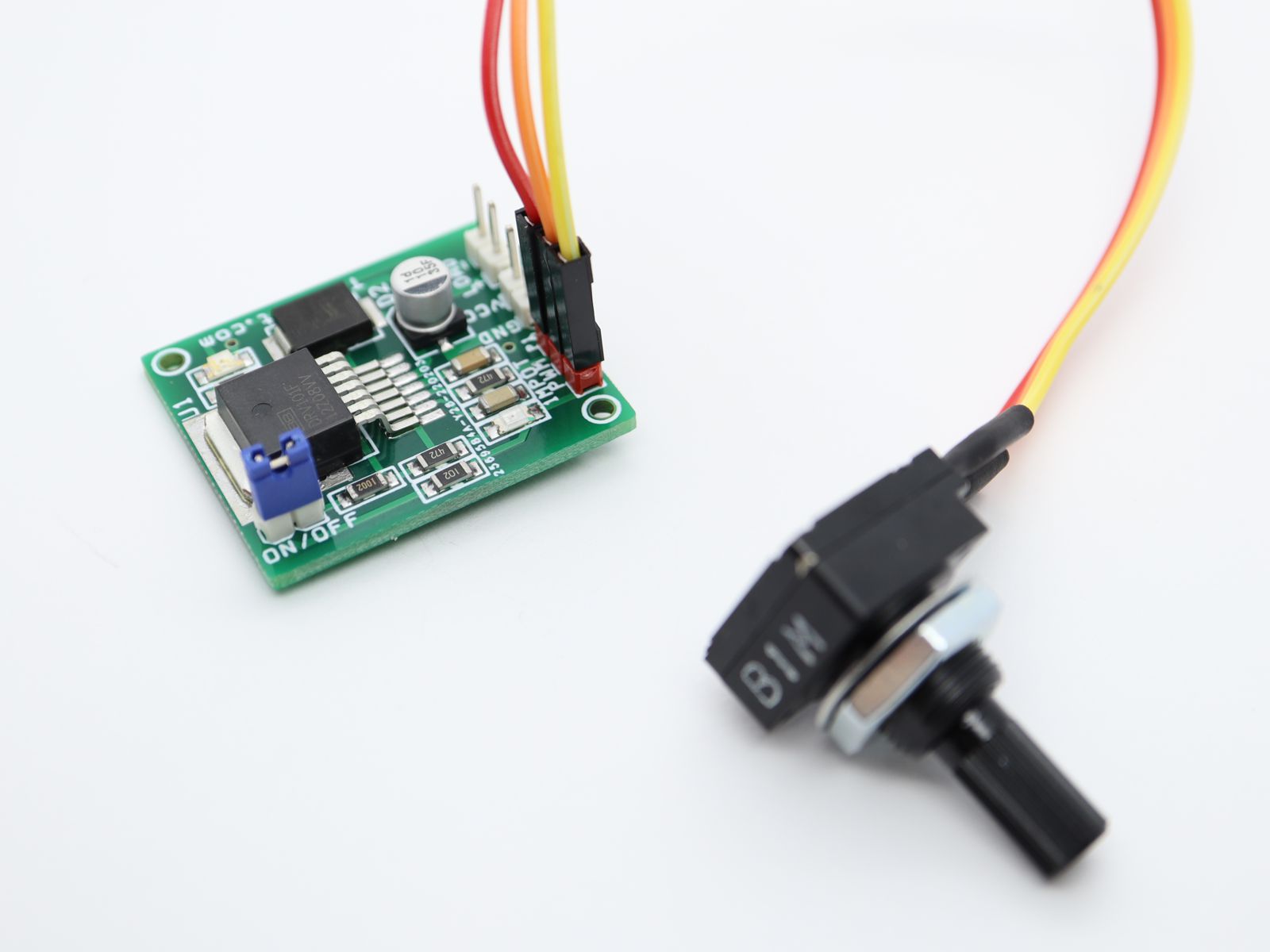
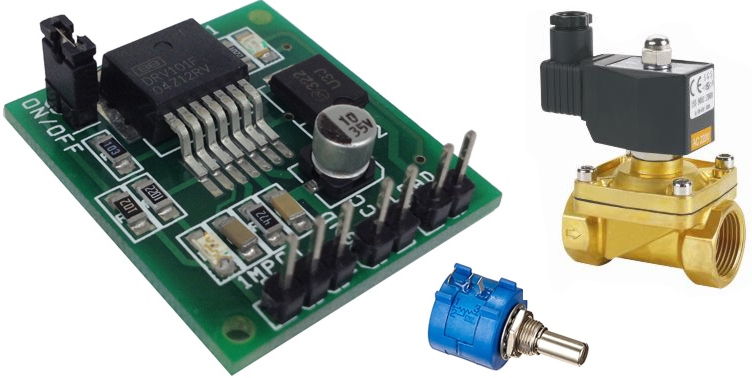
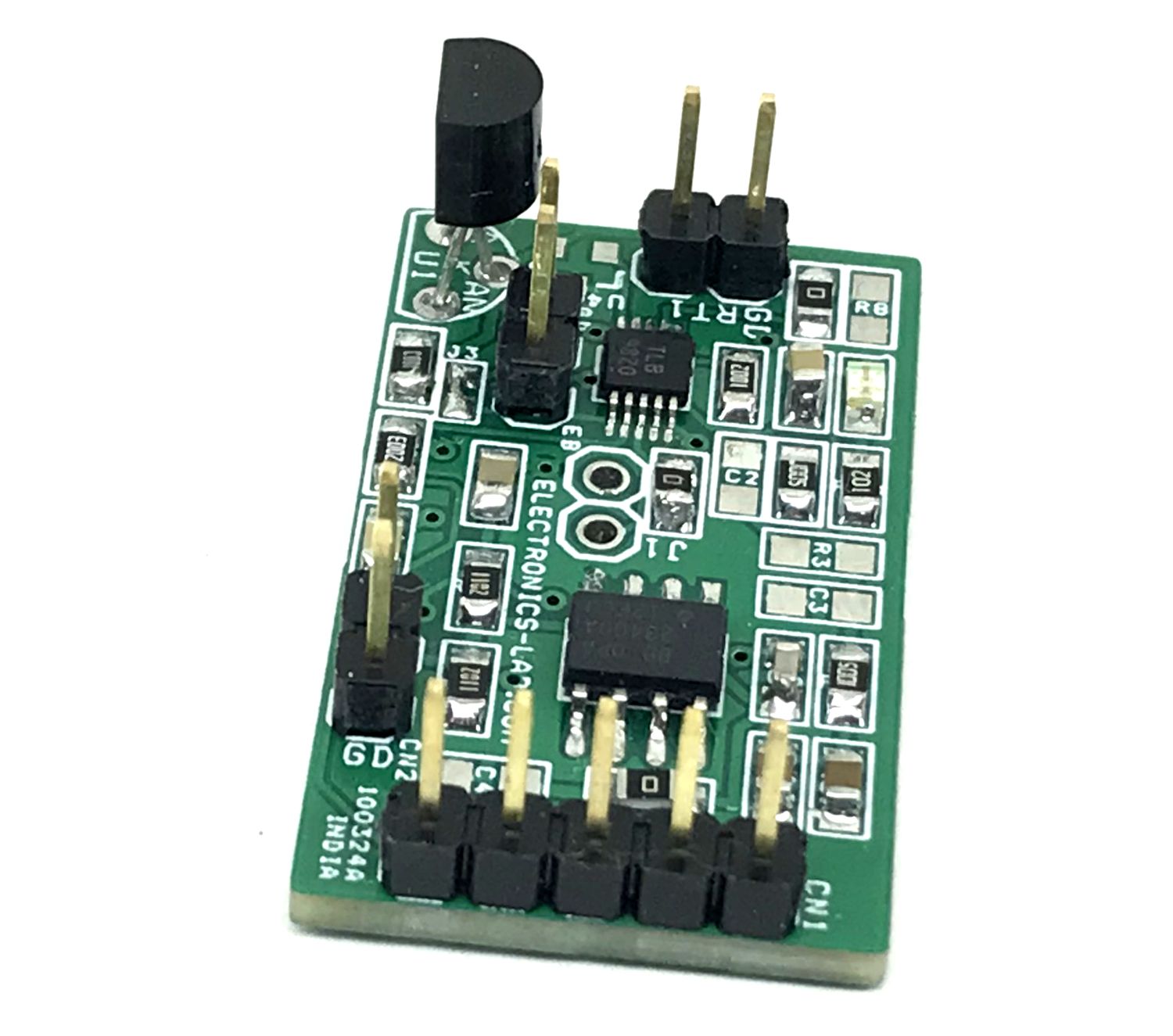
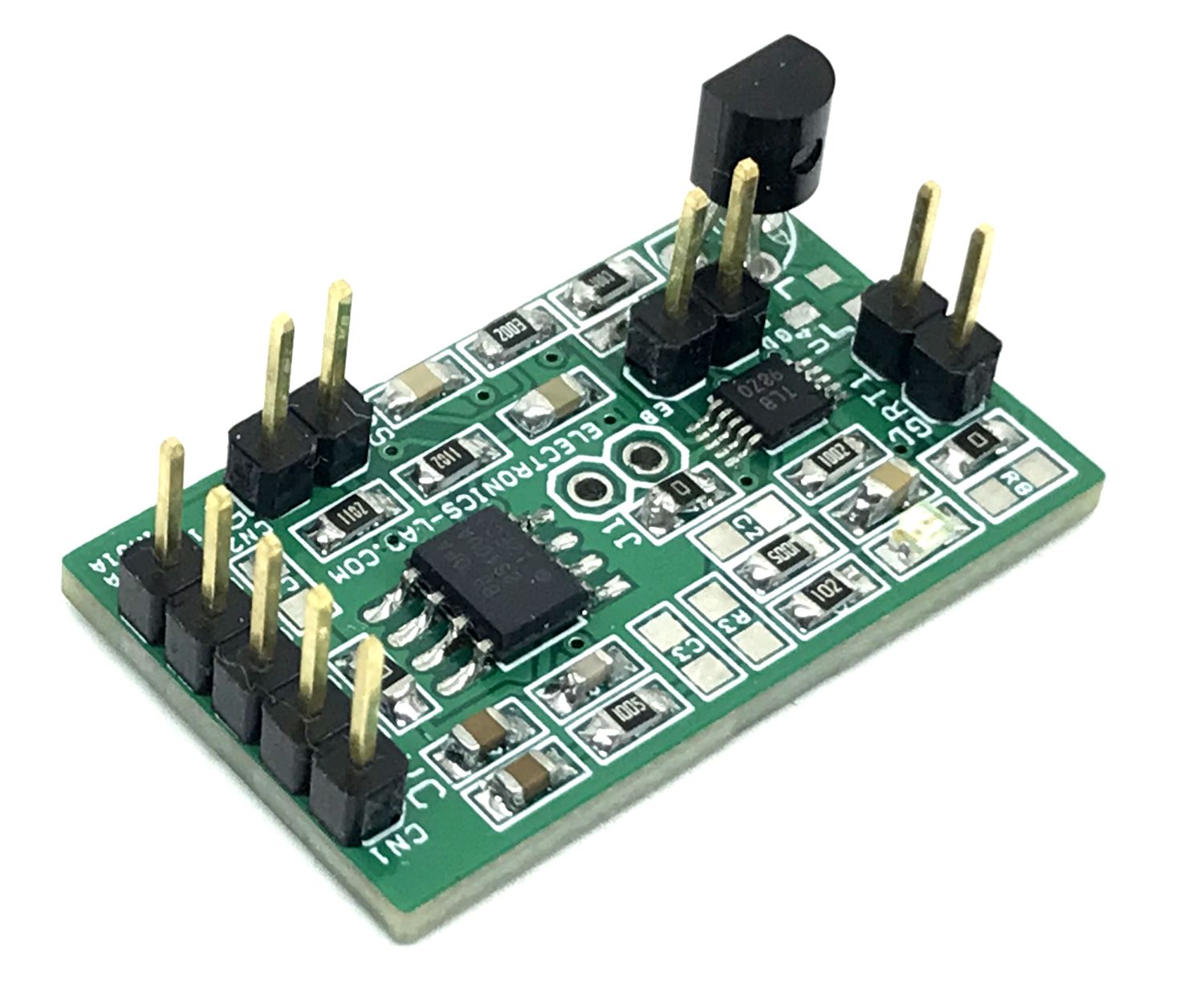
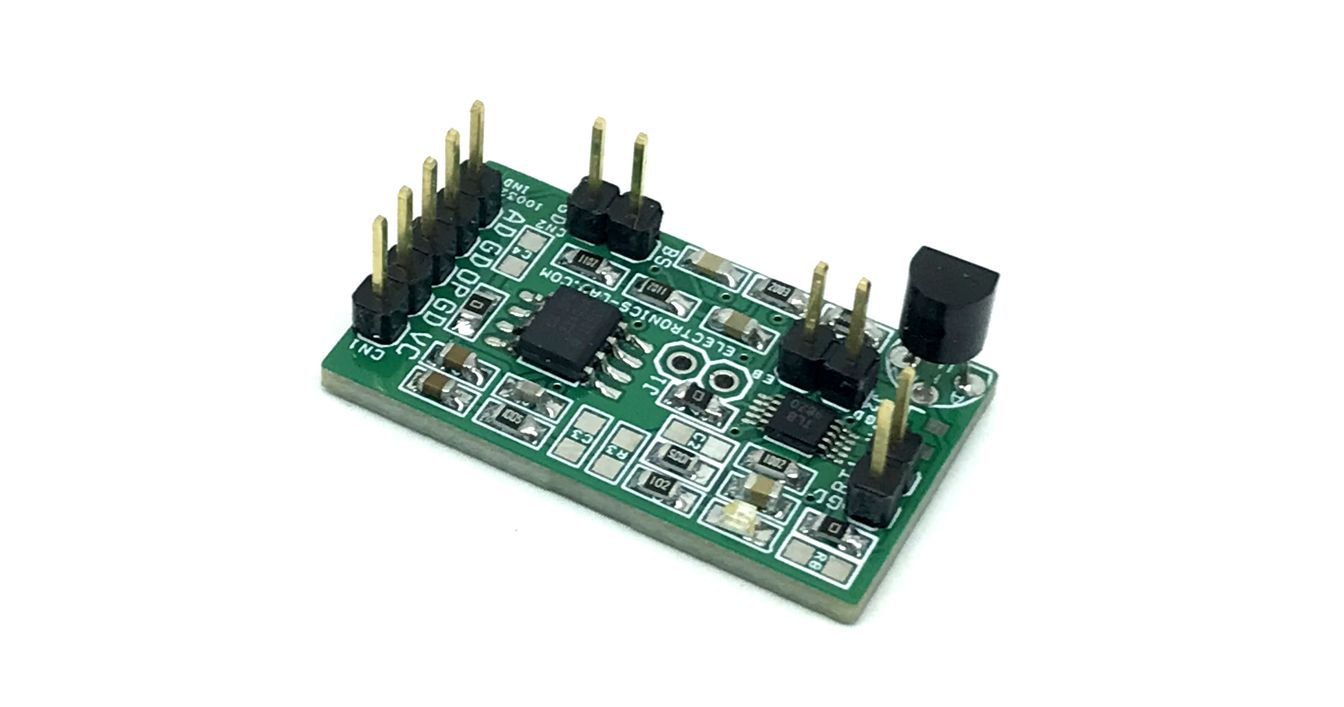
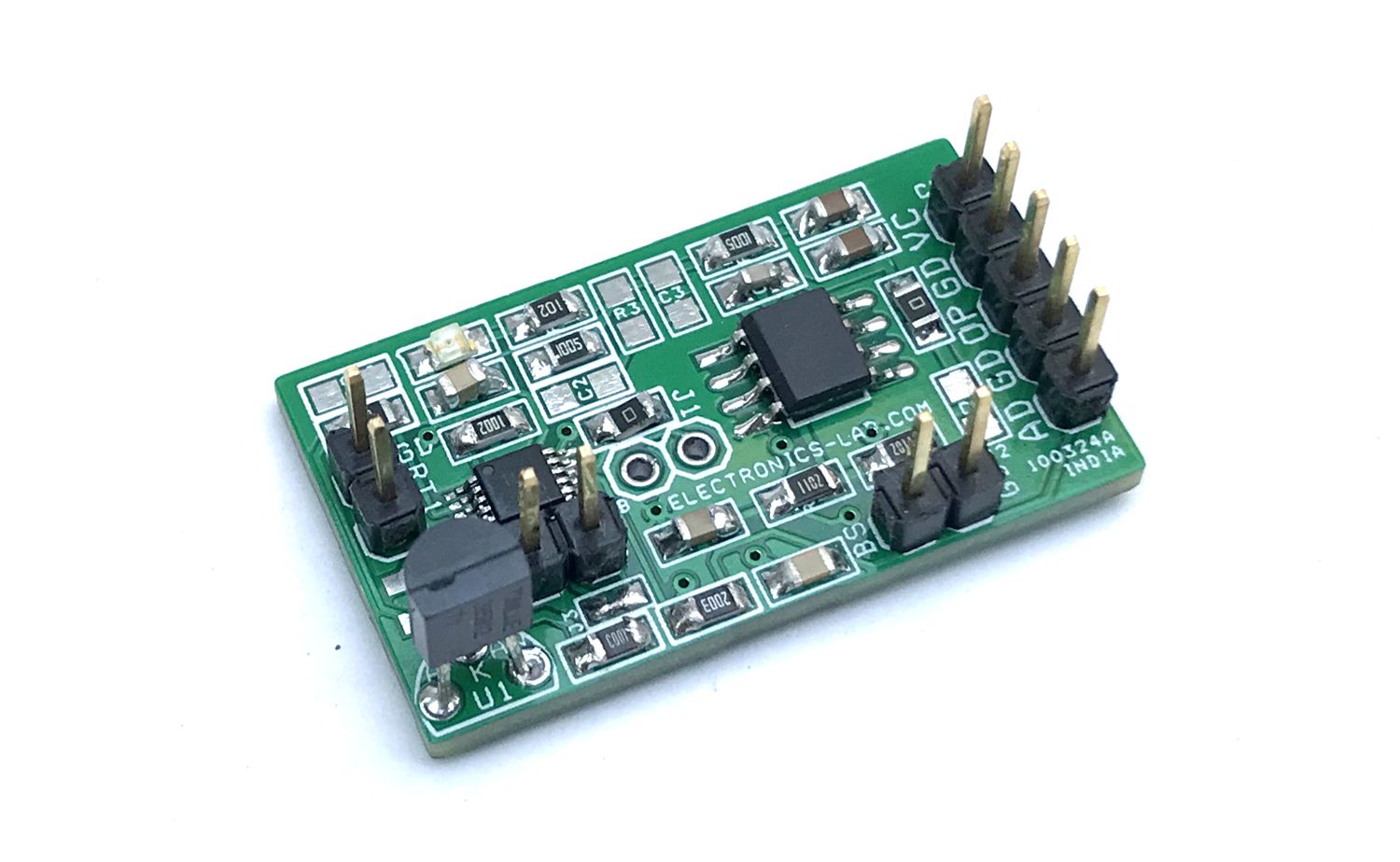
6V Lead acid (SLA) battery charger project is based on BQ24450 IC from Texas instruments. This charger takes all the guesswork out of charging and maintaining your battery, no matter what season it is. Whether you have a Bike, Robot, RC Car, Truck, Boat, RV, Emergency Light, or any other vehicle with a 6v battery, simply hook this charger maintainer up to the battery. The BQ24450 contains all the necessary circuitry to optimally control the charging of lead-acid batteries. The IC controls the charging current as well as the charging voltage to safely and efficiently charge the battery, maximizing battery capacity and life. The IC is configured as a simple constant-voltage float charge controller. The built-in precision voltage reference is especially temperature-compensated to track the characteristics of lead-acid cells, and maintains optimum charging voltage over an extended temperature range without using any external components. The low current consumption of the IC allows for accurate temperature monitoring by minimizing self-heating effects. In addition to the voltage- and current-regulating amplifiers, the IC features comparators that monitor the charging voltage and current. These comparators feed into an internal state machine that sequences the charge cycle.
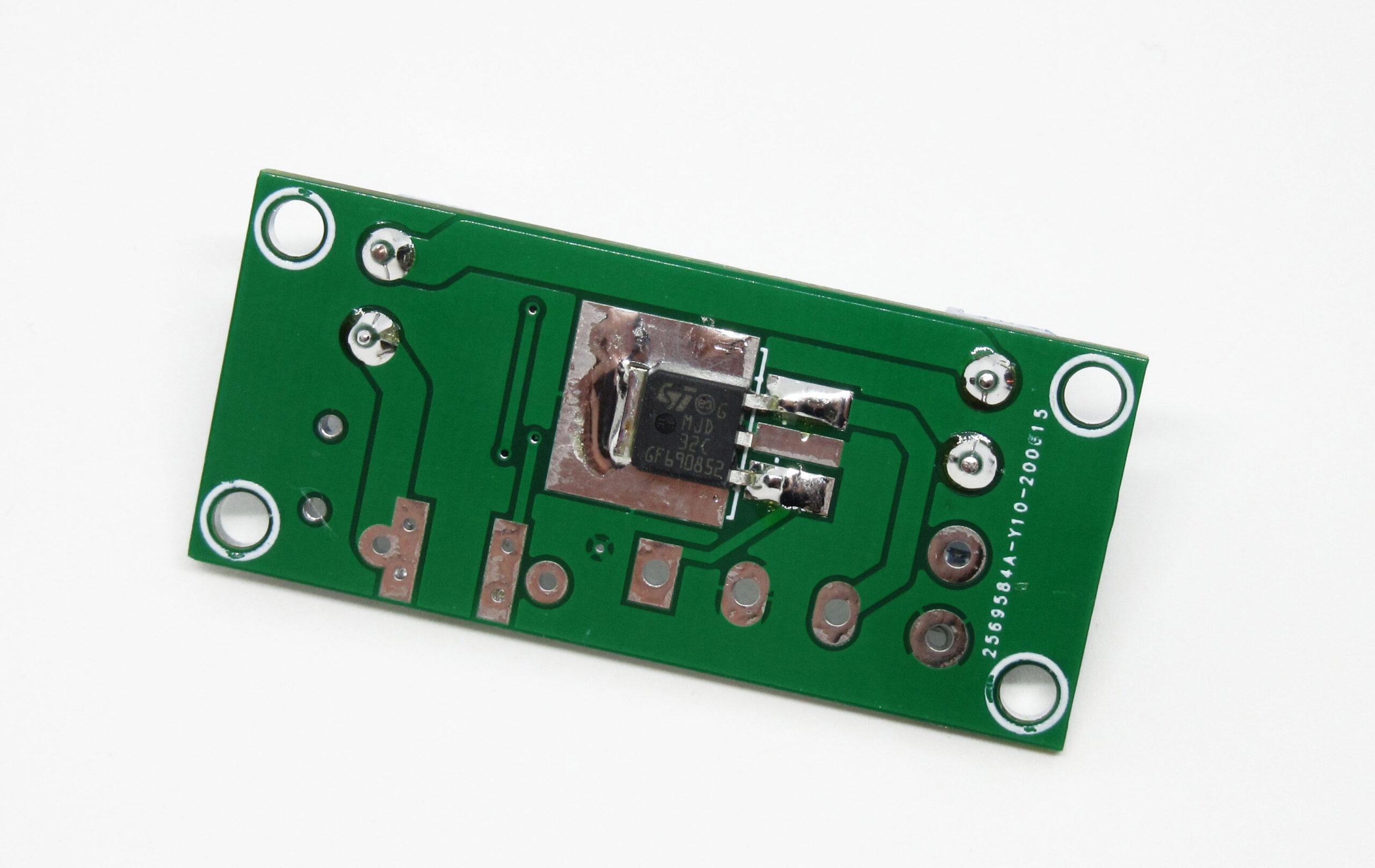
For low charging current, you can use SMD Q1 transistor on the bottom of PCB, for higher charging currents you should use a through-hole (TO247) transistor, like TIP147 on the top of PCB.
The circuit has been designed for PNP transistor (Q1) that’s why the PCB jumper is shorted to R8 by default. You can also use an NPN transistor, in this case, Omit R6, Use R2, Jumper has to be shorted the other way.
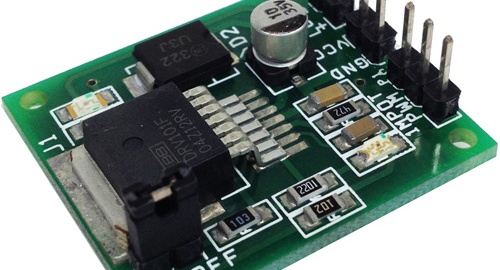
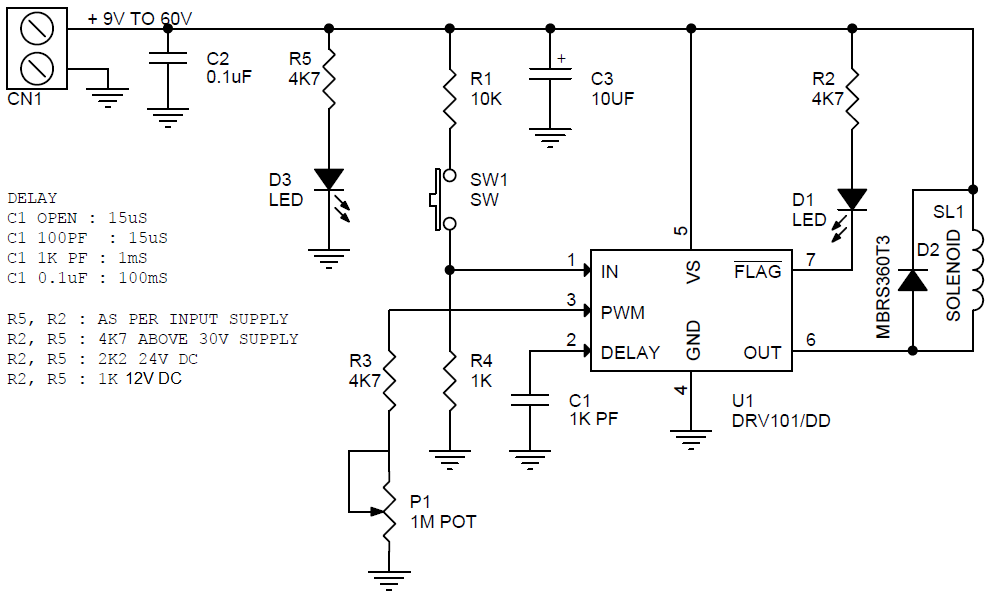
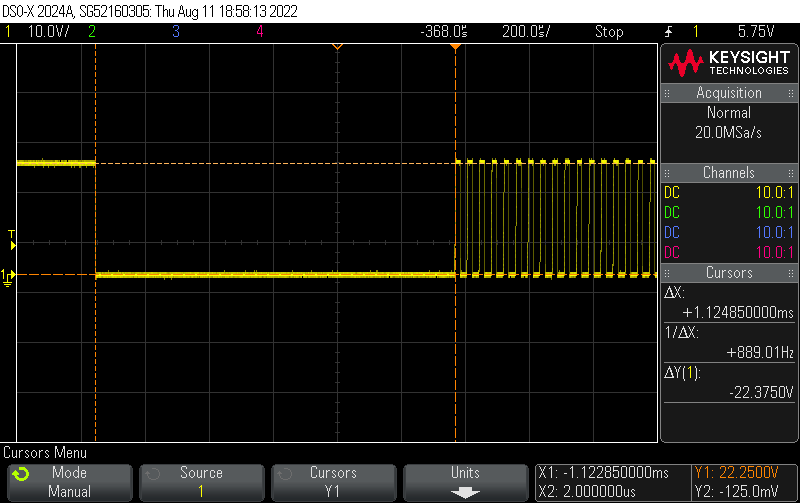
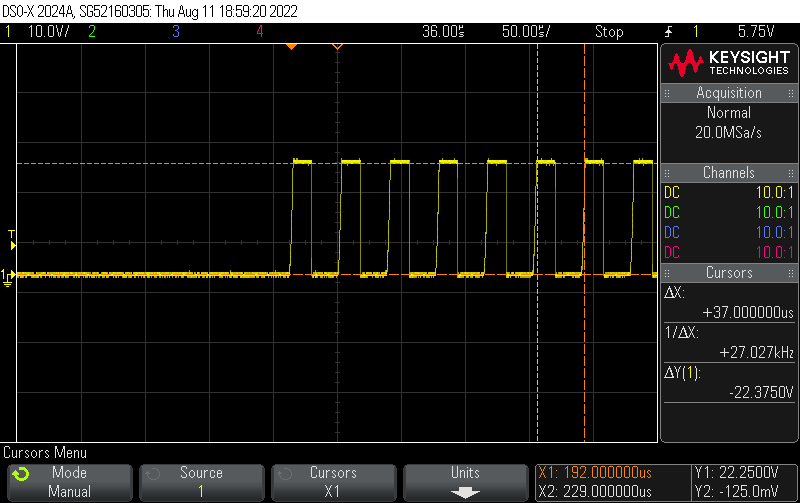
The DRV101 is a low-side power switch employing a pulse-width modulated (PWM) output. Its rugged design is optimized for driving electromechanical devices such as valves, solenoids, relays, actuators, and positioners. The DRV101 module is also ideal for driving thermal devices such as heaters and lamps. PWM operation conserves power and reduces heat rise, resulting in higher reliability. In addition, an adjustable PWM potentiometer allows fine control of the power delivered to the load. Time from dc output to PWM output is externally adjustable. The DRV101 can be set to provide a strong initial closure, automatically switching to a soft hold mode for power savings. The duty cycle can be controlled by a potentiometer, analog voltage, or digital-to-analog converter for versatility. A flag output LED D2 indicates thermal shutdown and over/under current limit. A wide supply range allows use with a variety of actuators.
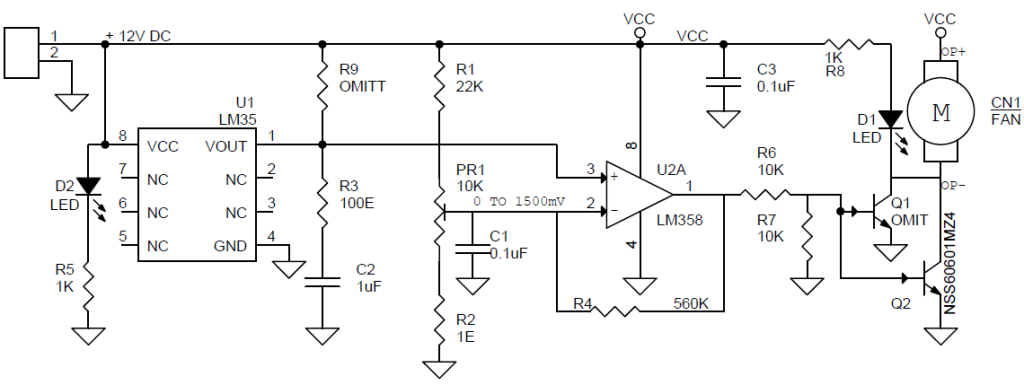
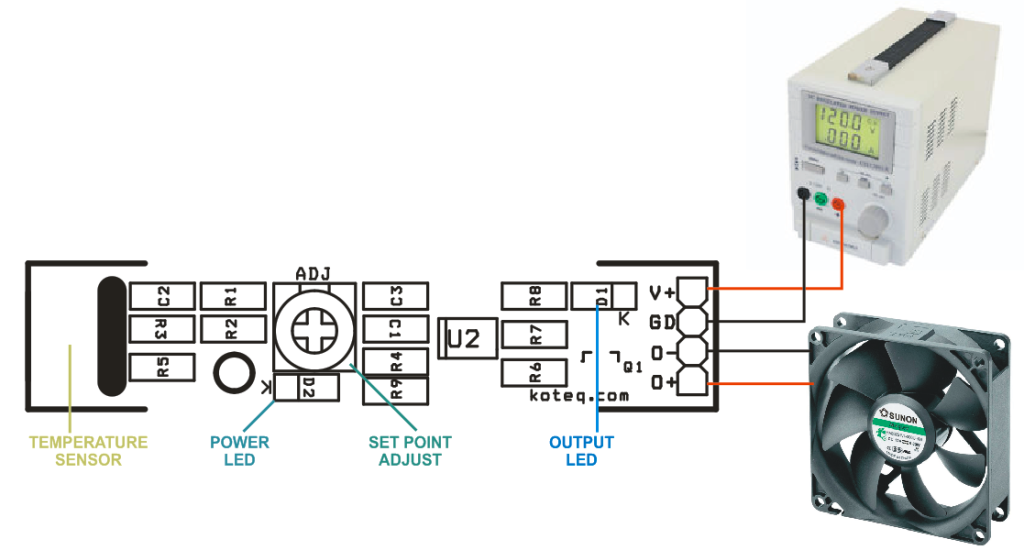
Heat activated cooling fan controller is a simple project which operates a brushless fan when the temperature in a particular area goes above a set point, when temperature return normal, fan automatically turns off. The project is built using LM358 Op-amp and LM35 temperature Sensor. Project requires 12V DC supply and can drive 12V Fan. This project is useful in application like Heat sink temperature controller, PC, heat sensitive equipment, Power supply, Audio Amplifiers, Battery chargers, Oven etc
The SMD SO8 LM35 used as temperature sensor, LM358 act as comparator and provides high output when temperature rise above set point, high output drive the Fan through driver transistor. The LM35 series are precision integrated-circuit temperature devices with an output voltage linearly-proportional to the Centigrade temperature. The LM35 device has an advantage over linear temperature sensors calibrated in Kelvin, as the user is not required to subtract a large constant voltage from the output to obtain convenient Centigrade scaling. The LM35 device does not require any external calibration or trimming to provide typical accuracy of ±¼°C at room temperature. Temperature sensing range 2 to 150 centigrade. LM35 provides output of 10mV/Centigrade.
This autofocus camera is tiny, but definitely not to be underestimated: The uEye XS from IDS Imaging Development Systems weighs just 12 grams and fits into almost any application with its size of just 26.4 x 23 x 21.7 mm. Thanks to its autofocus and 5 MP CMOS sensor, it delivers consistently sharp images and videos from a distance of just 10 cm – for example in hand-held scanners, on robotic arms or in passport photo machines. The uEye XS starter set is ideal for testing the camera. In addition to the compact USB2 camera, it includes a cable, a tripod adapter and a tripod.
If the distance between the lens and the object is constantly changing, users benefit from industrial cameras with automatic focus. They eliminate the need for manual refocusing and ensure that objects or labels are always perfectly visible. When it comes to image quality, however, other factors are also decisive, such as natural color reproduction and harmonious contrast.
IDS has therefore equipped the uEye XS with many other practical automatic features familiar from consumer technology. This includes white balance, exposure, and gain. As a result, it delivers the best possible result in every situation. Anyone wishing to fine-tune even more precisely can adjust settings in the SDK (IDS Software Suite).
Thanks to its small size and the proven USB2 interface, the uEyeXS camera is suitable as a component in embedded vision systems. It is used, for example, in medical or security applications, in transport and logistics or in kiosk systems.
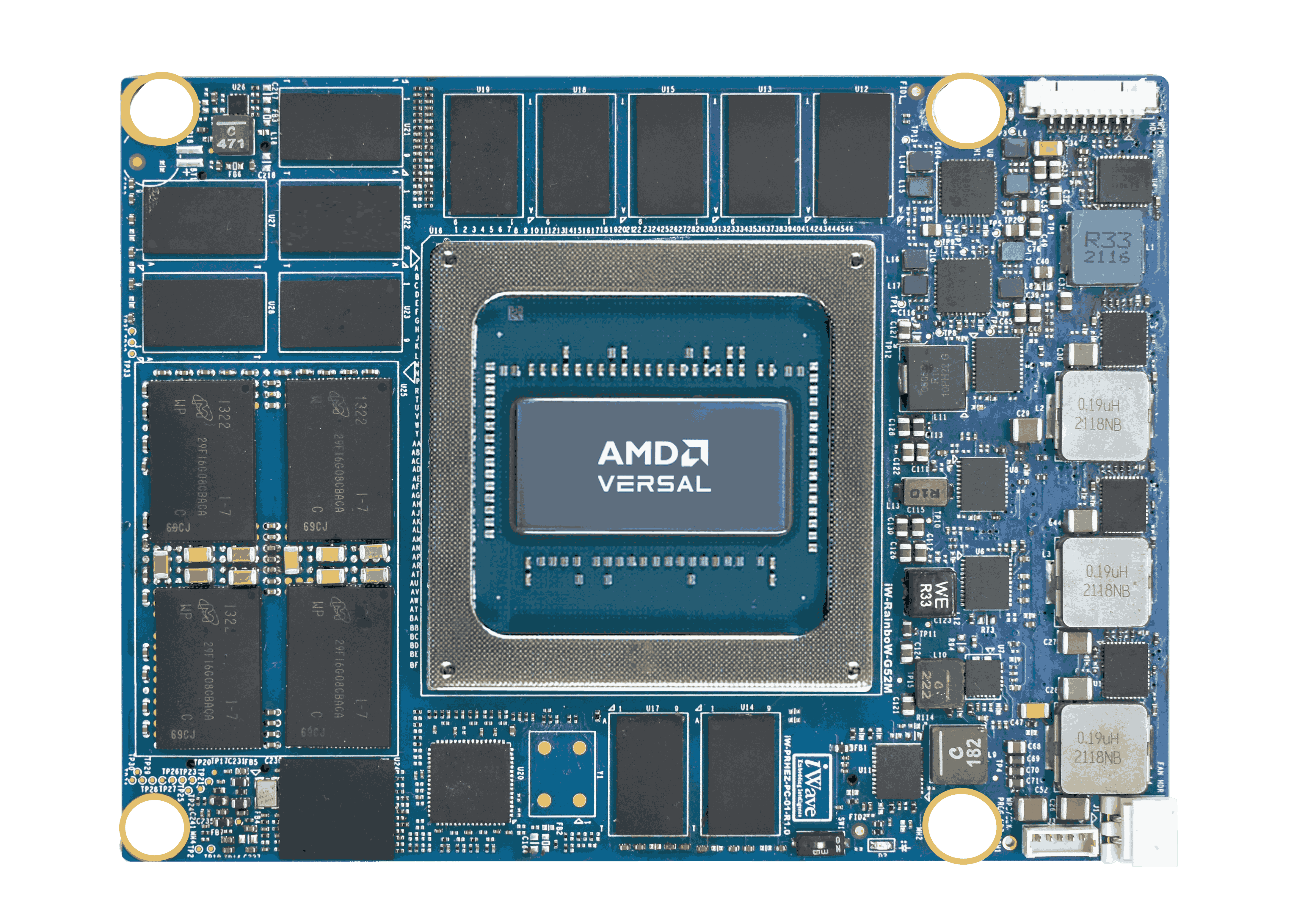
iWave introduces iW-RainboW-G63M: a System on Module (SoM) based on the AMD series, targeting next-generation network and cloud deployments. The new SoM features the Versal Premium series rich in networking interfaces, security engines, and high compute density required for a wide range of applications ranging from data centers and 5G to communication test equipment. The System on Modules and evaluation kits from iWave will be available for evaluation starting in December 2024.
iW-RainboW-G63M: The Versal Premium-based System on Module is compatible with an extensive series of chipsets: VP1552/VP1502/VP1402/VP1202/VP1102. The System on Module is integrated with 4GB LPDDR4 RAM, 256MB QSPI Flash, 16GB eMMC Flash, and 4Kbit EEPROM. Three high-speed expansion connectors supporting high speed transceiver channels up to 112Gbps speed and 192 user configurable IOs provided on the System on Module enable a multitude of interfaces available for the user.
The Versal SoM offers networked, power-optimized cores with many high-speed connectivity options like 112Gbps high-speed transceiver blocks providing superior bandwidth, multi-hundred-gigabit ethernet, PCIe Gen5 with built-in DMA, providing the flexibility to support a variety of data rates and protocols.
Versal Premium combines scalar engines (Arm Cortex A72 Cores applications processor and Arm Cortex R5 core for real-time processing and control) enabling compute for complex algorithms while enabling high levels of safety and security. Boasting high-speed cryptography engines, the Versal Premium series delivers 1.6Tb/s of line rate encryption throughput, making it an ideal platform for secure networks. With the System on Module, customers can build network and cloud applications with reduced development cost, reduced risk and time.
Developers can initiate their projects with the Versal Premium evaluation kit. iWave facilitates both hardware and software development with tools like the Vivado design tool, Vitis unified software, frameworks, and accelerated libraries tailored for specific applications. Moreover, iWave offers personalized design and manufacturing services for the SoM, ensuring a holistic ecosystem for customers throughout their product development journey.
“iW-RainboW-G63M System on Module is built to leverage the adaptive portfolio of Versal Premium, enabling the building of fast and secure networks while offering adaptable acceleration for new data-intensive workloads that are transforming networks and data centers,” says Mr. Abdullah Khan M, Director-Engineering at iWave Systems. “The System on Module is an ideal fit for applications like data center interconnect, digital adaptive radars, network testers, metro/core transport, and security appliances where massive serial bandwidth, security, and compute density.”
About iWave
iWave is an embedded systems engineering and solutions company, designing solutions for the Industrial, Medical, Automotive, and Avionics vertical markets. Building on a core competency of embedded expertise since 1999, iWave boasts of an extensive portfolio of high-performance FPGA and SoC FPGA System on Modules and embedded computing platforms enabling customers in their product development journey. Learn more about iWave at www.iwavesystems.com.
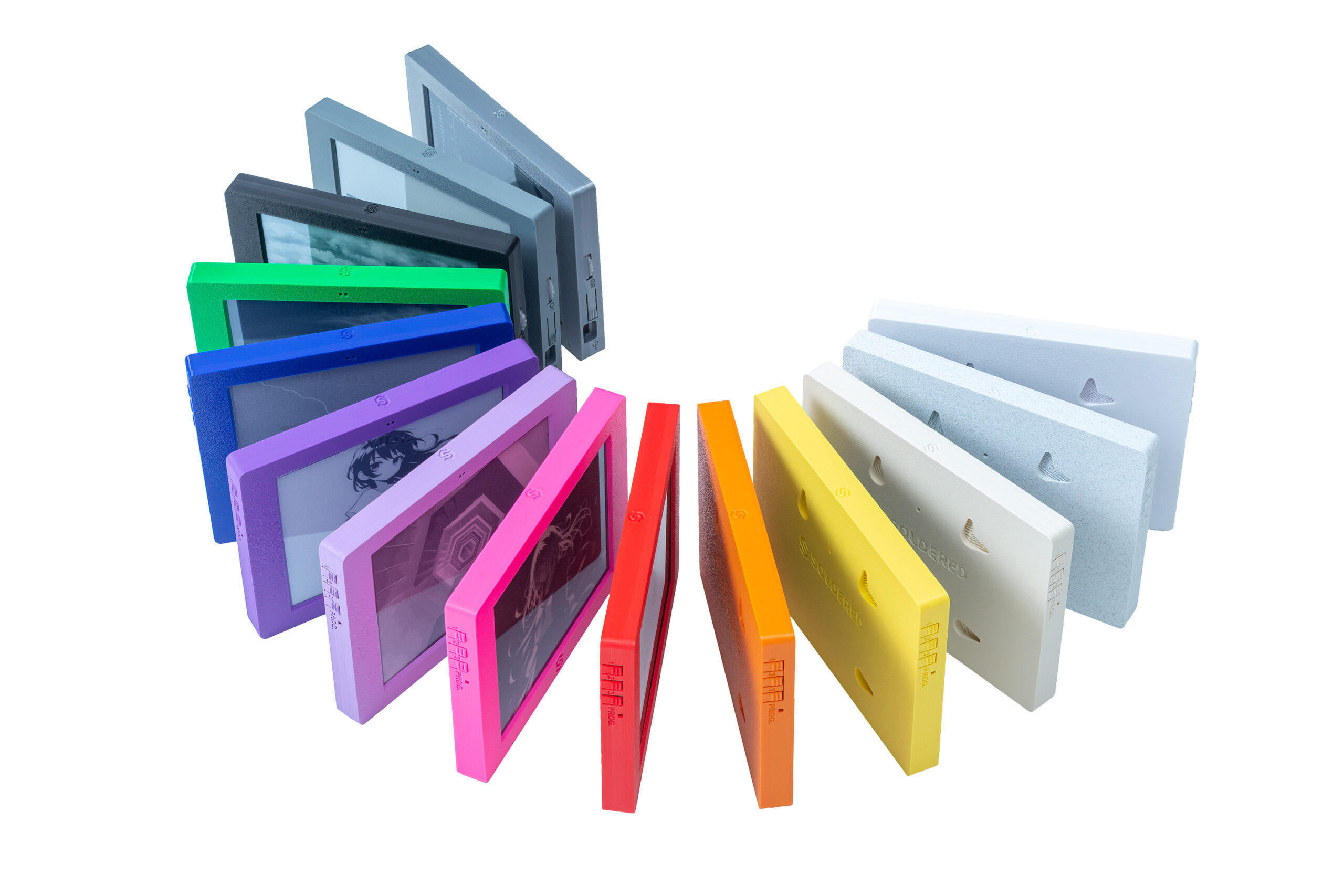
After an intensive journey of product research and development, combined with extensive testing, the Croatian-based company Soldered Electronics, specializing in e-ink and low-power technology, is proud to announce the market release of a new generation of e-paper products via a global crowdfunding campaign for the Inkplate 6 MOTION e-paper display.
Inkplate 6 MOTION is open hardware driven by open-source software, already produced in large series, and well-known and accepted among the makers and hardware hackers community due to its multifunctionality and versatility.
Inkplate 6 MOTION is a hackable tool for makers, designers, thinkers, and others ready to take advantage of e-paper display technology. Its adaptability, paper-like aesthetic, daylight readability, and extremely low power consumption make it ideal for a wide range of applications. Whether you’re a creative professional, a product designer, an engineer, a student, a writer, a smart-home enthusiast, or anyone else engaged in creative or technical pursuits, this device supports all kinds of e-paper projects. It’s perfect for displaying photographs, gathering and visualizing data, reading and writing text, or any other application that benefits from the magic of e-paper.
What makes the Inkplate 6 MOTION device truly advanced and innovative is its unmatched speed and ease of use. With its 6.0-inch display capable of refreshing at 11 frames per second, it allows for not only quality images but also smooth video and captivating animations with minimal lag. Paired with a powerful STM32H743 microcontroller and enhanced connectivity options, this Inkplate model excels beyond typical e-paper devices, establishing itself as one of the leading choices among high-end e-paper displays for its superior technical performance.
Video
Inkplate 6 MOTION comes with user-friendly tools that make e-paper accessible without requiring in-depth programming expertise. It supports the Arduino IDE for quick and easy image rendering and leverages MicroPython for more complex projects. Adafruit GFX support is included, as is compatibility with the Home Assistant and ESPHome automation platforms.
With its multifunctionality and numerous features, Soldered Electronics invites you to explore the Inkplate 6 MOTION in more detail on its crowdfunding campaign page and video presentation.
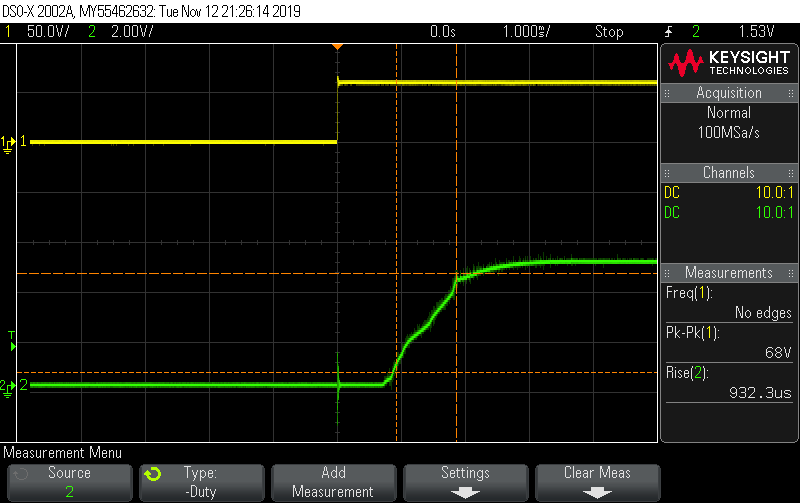
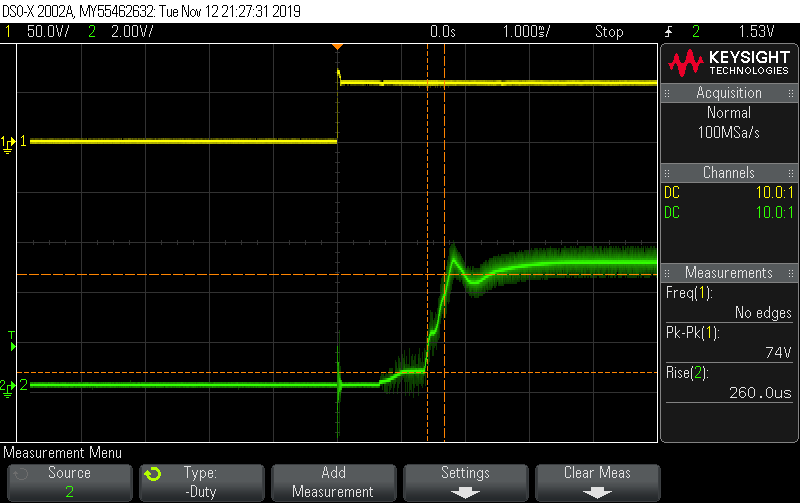
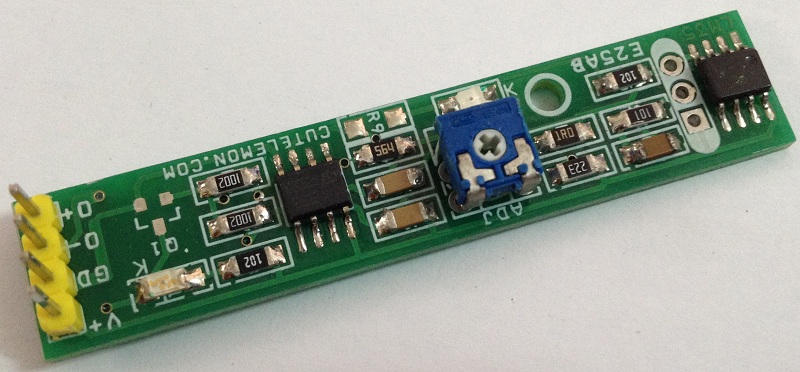
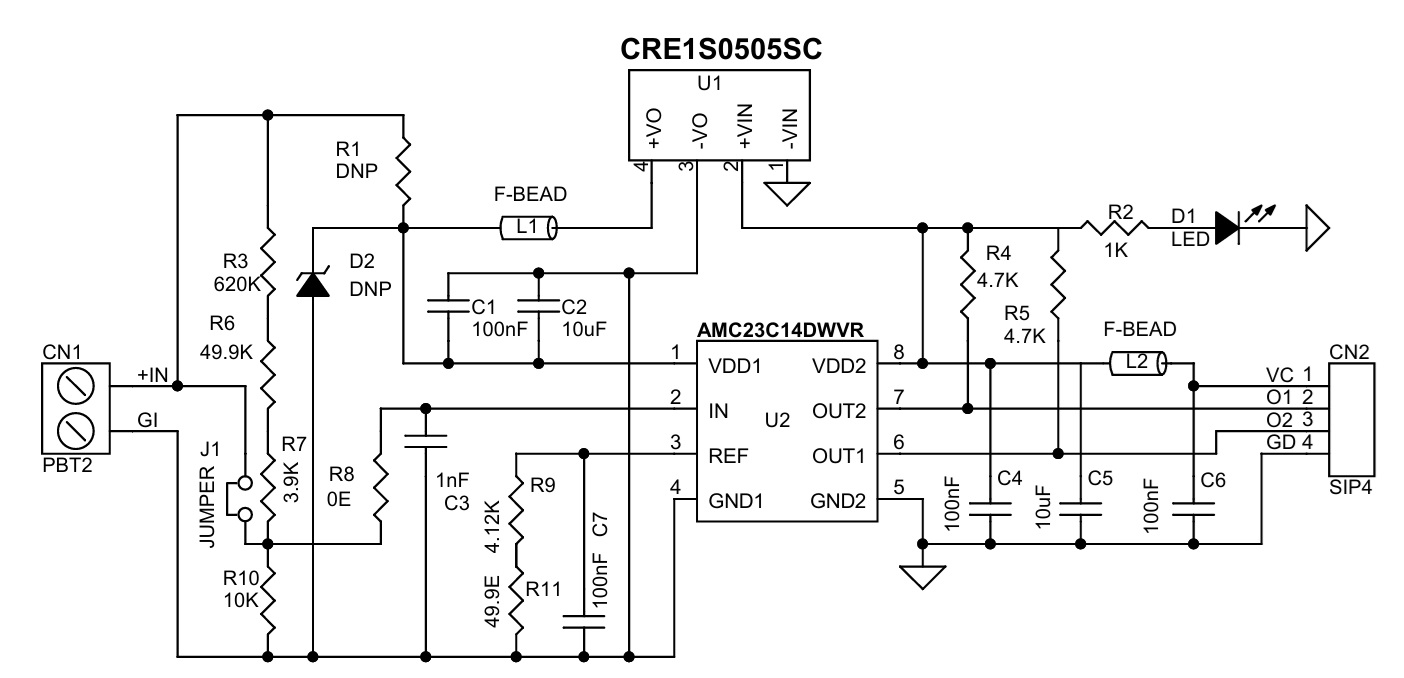
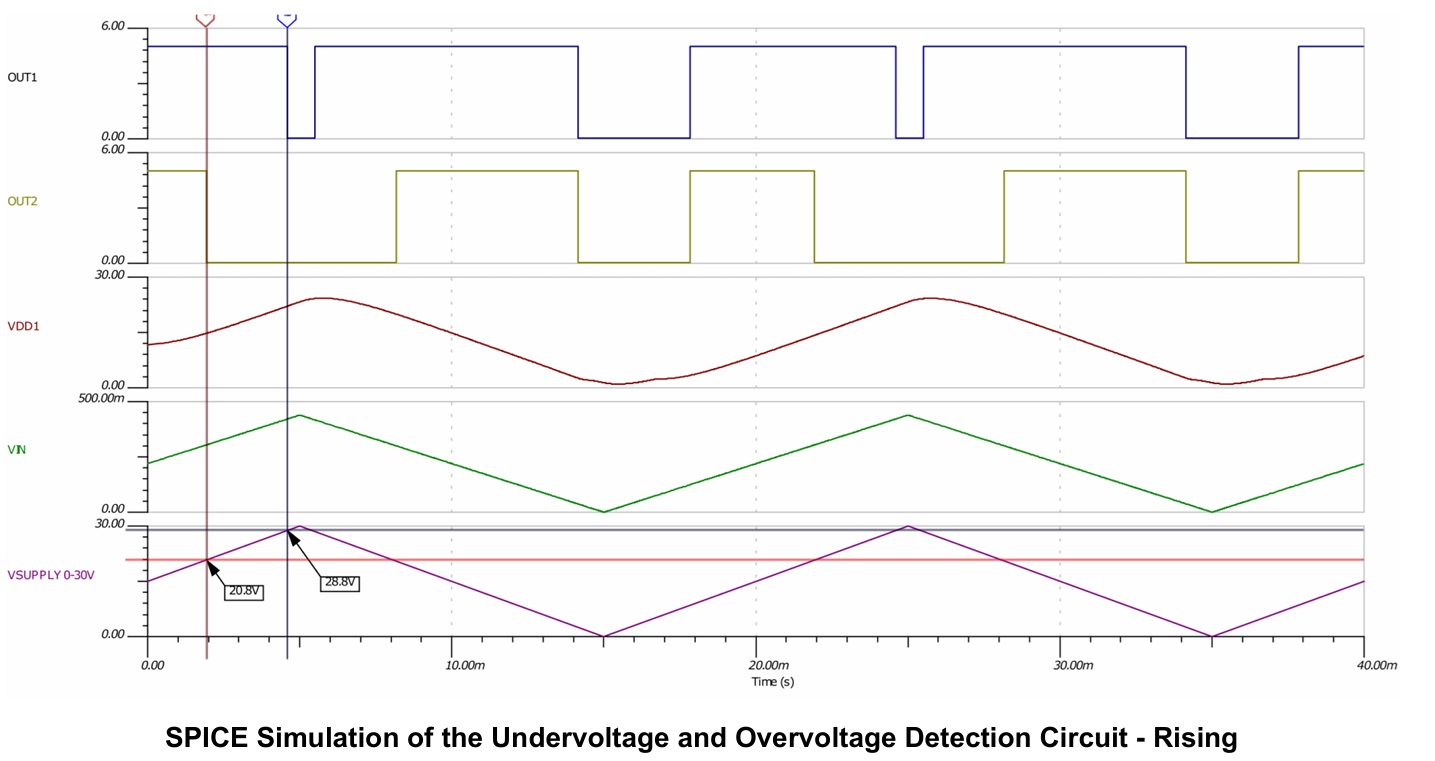
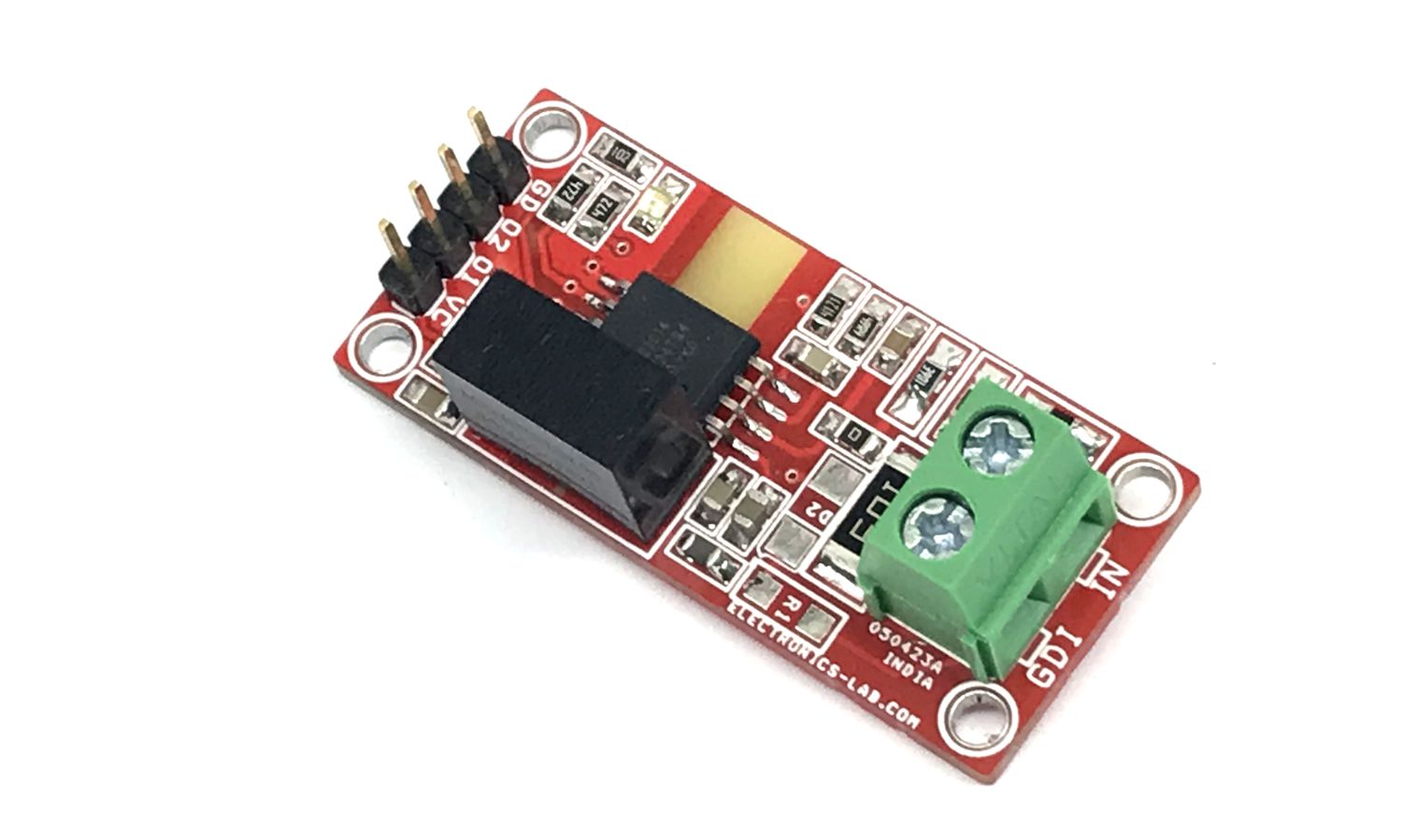
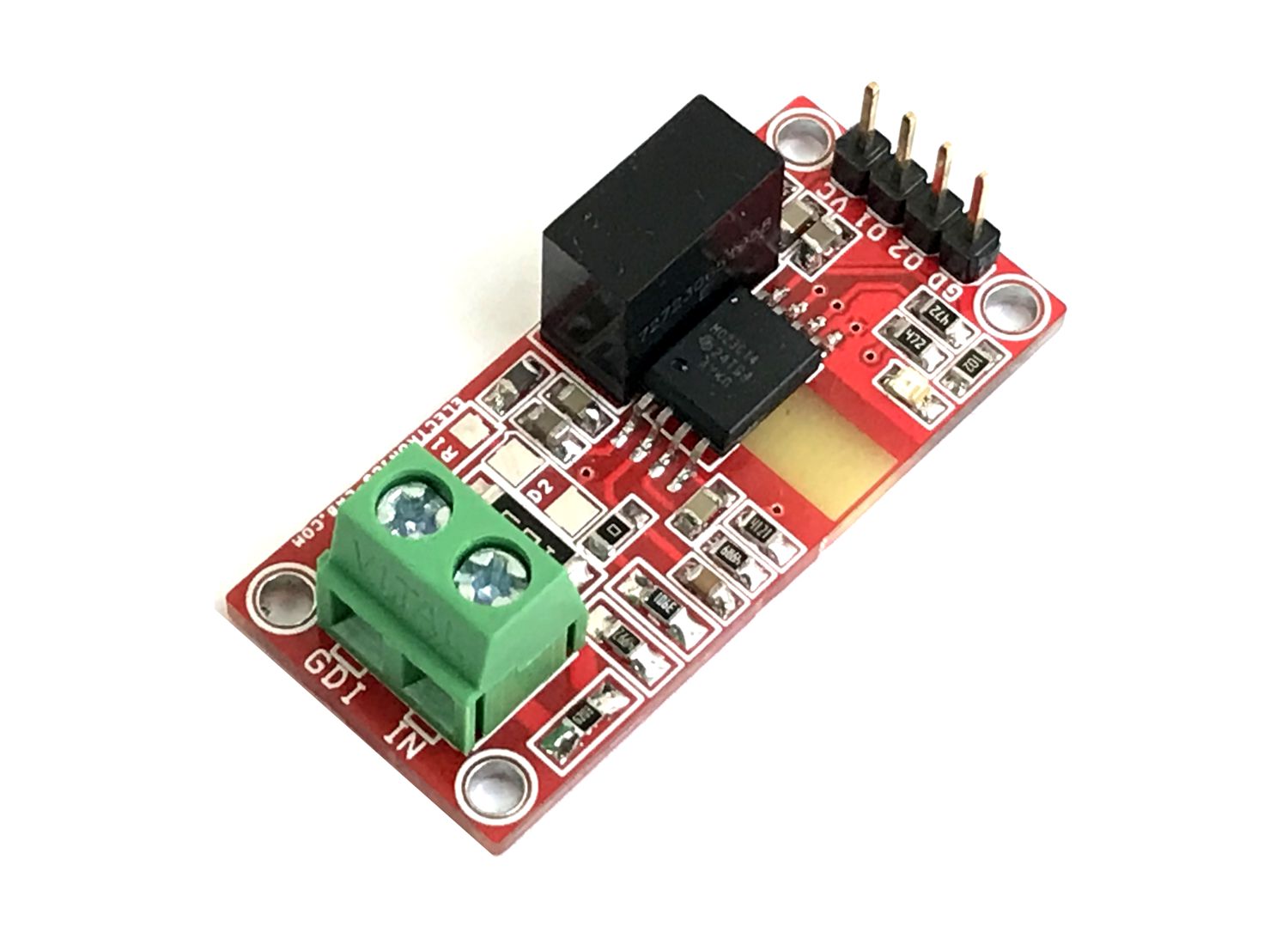
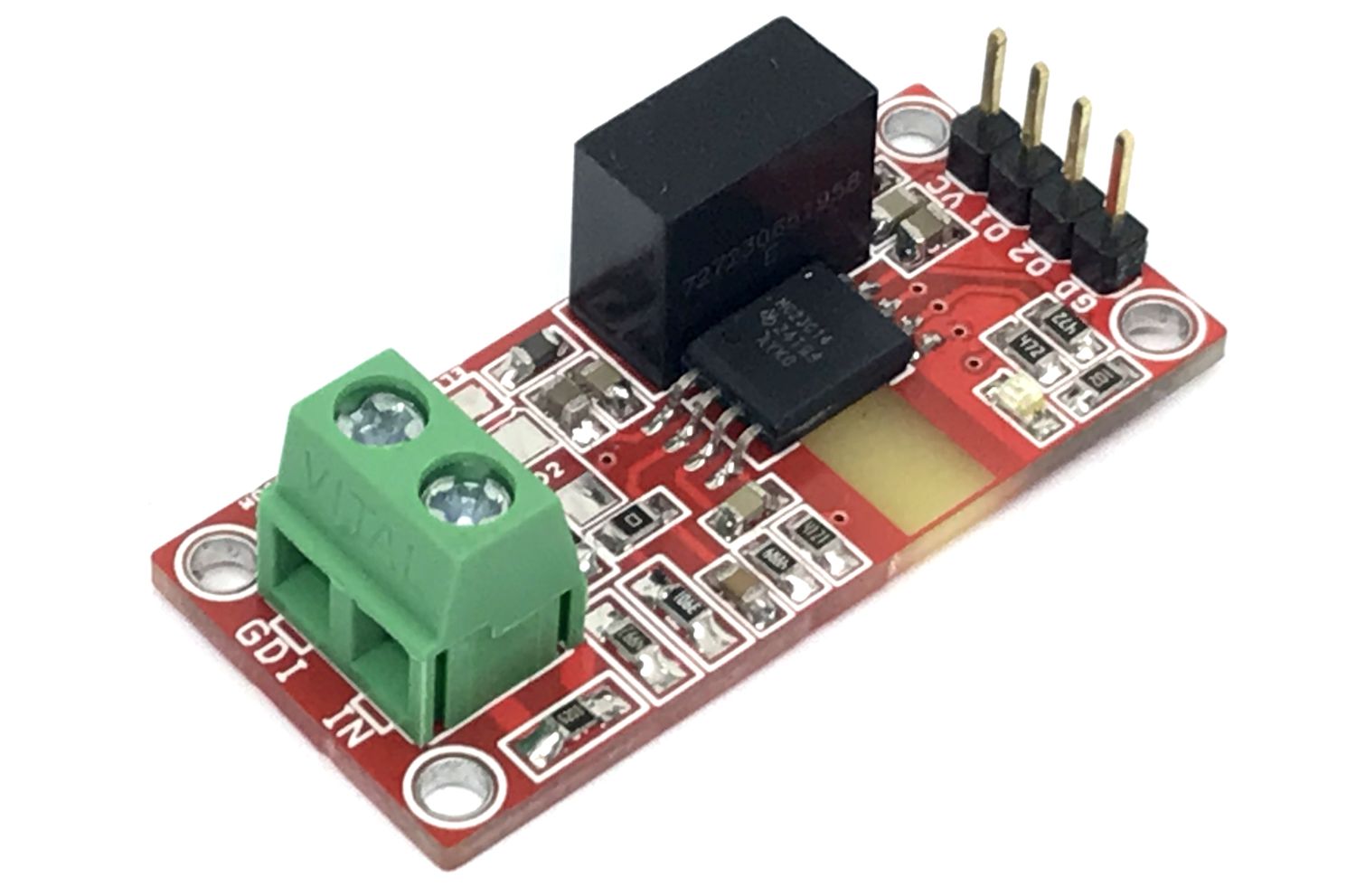
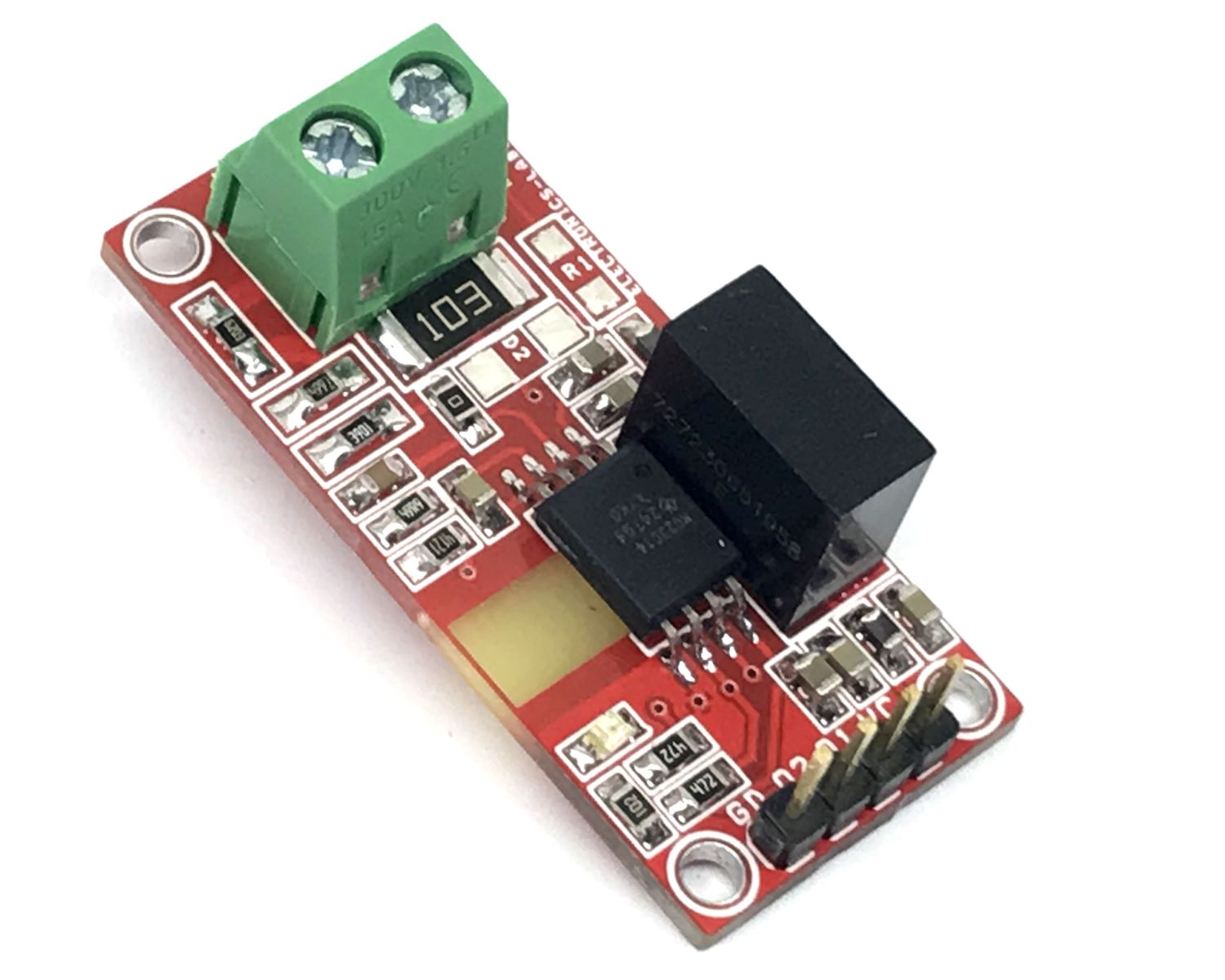
This high-speed, isolated Undervoltage and Overvoltage detection project is implemented with a dual isolated window comparator with an adjustable threshold (AMC23C14). This circuit is designed for industrial field-supply applications where the controller side must detect whether the remote module supply voltage is in a valid range.
The AMC23C14 has open-drain outputs that are pulled up to VCC, and are driven low when the input voltage exceeds the threshold voltage of each comparator. In these measurements, OUT1 (trace 3) transitions low if Vsupply exceeds 28.8V, and OUT2 transitions low if Vsupply exceeds 20.8V. Component variations and the comparator hysteresis can affect the trip thresholds, but in this case, the trip point is within less than 1% of the desired values. The voltage thresholds vary slightly if Vsupply is rising or falling. The second waveform depicts this with OUT1 triggering at 28.6V instead of 28.8V.
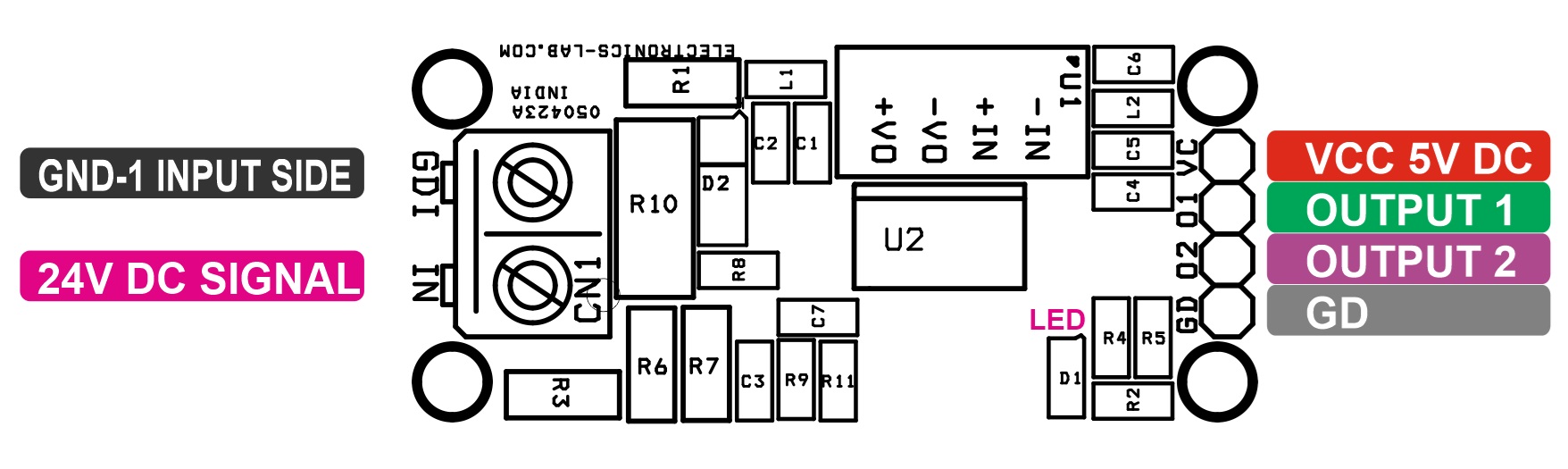
U1 (CRE1S0505SC) is an isolated DC-DC converter that provides 5V to the input side circuitry. The module can be powered from input side power, using R1 1K SMD size 0805 and Zener diode 27V 1W SMD. Do not install U1 in this case, the output side requires separate 2.7V to 5.5V VCC.
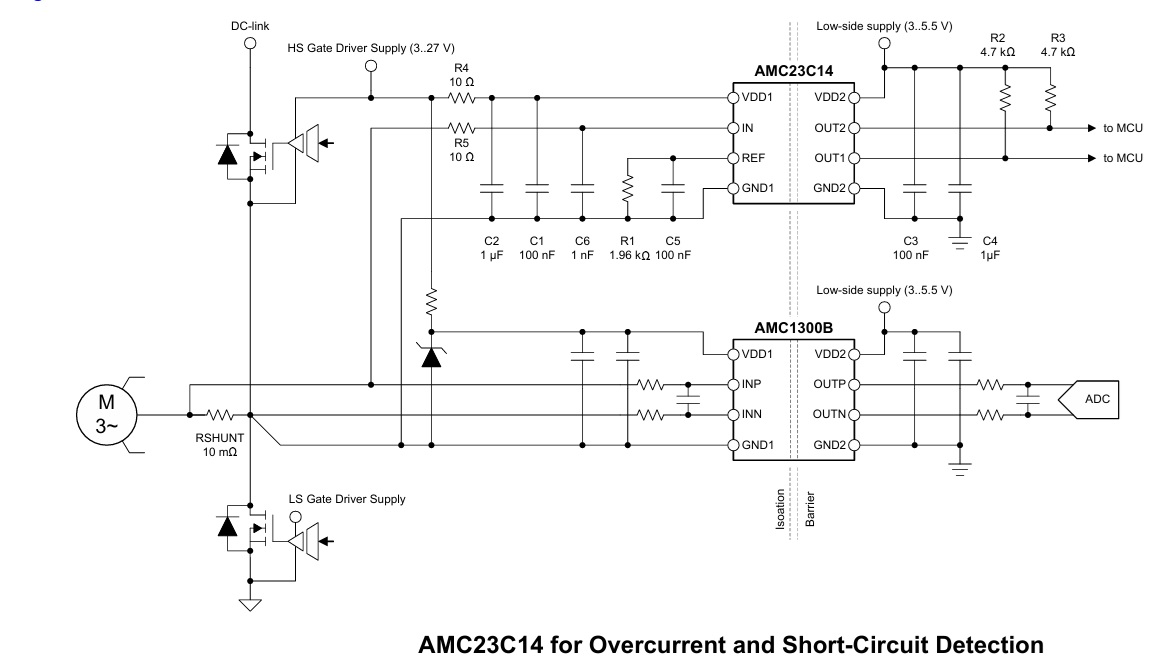
Over Current and Short Circuit Application
The project is designed for Under/Over voltage detection. However, the project also has provisions to be used for over-current and short-circuit detection. Read the datasheet of the chip for more info. Do not install R3, R6, and R7, Install R10 = 10mOhms SMD size 2512, solder jumper J1 under the PCB. This configuration will help you to detect over current and short circuit across the shunt resistor R10.
Features
Power Supply 5V DC
Input Signal 24V
Over Voltage Level 28.8V
Under Voltage Level 20.4V
Output 1 and Output 2 Normally High, Low when Over/Under Condition Occurs
7000-VPK reinforced isolation per DIN EN IEC 60747-17 (VDE 0884-17)
5000-VRMS isolation for 1 minute per UL1577
5 mm Mounting Hole
PCB Dimensions 42.23 x 19.05mm
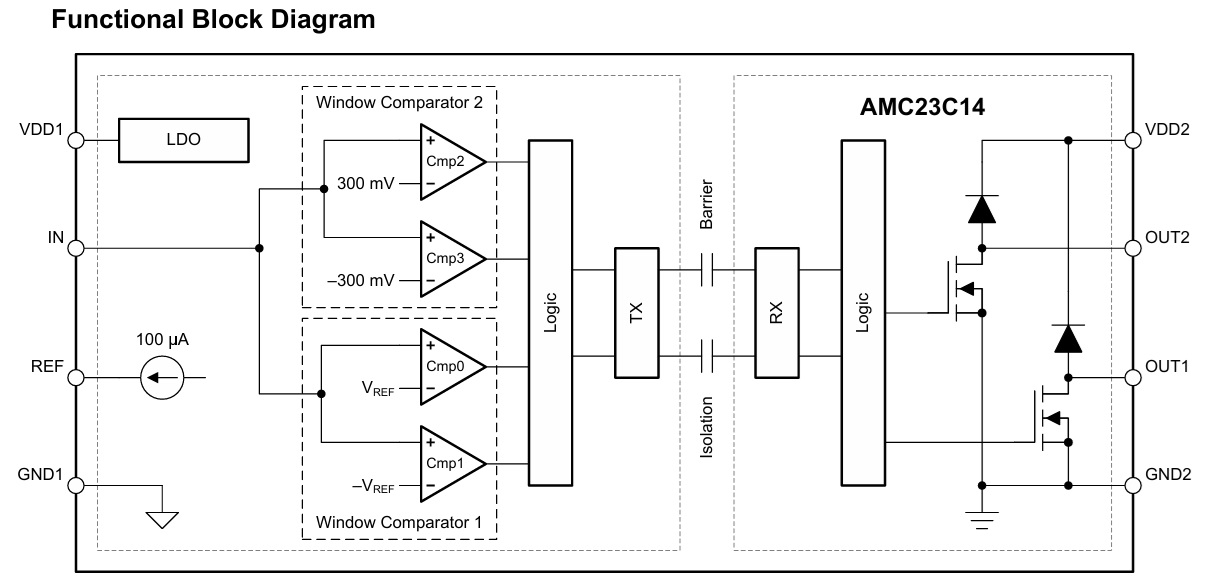
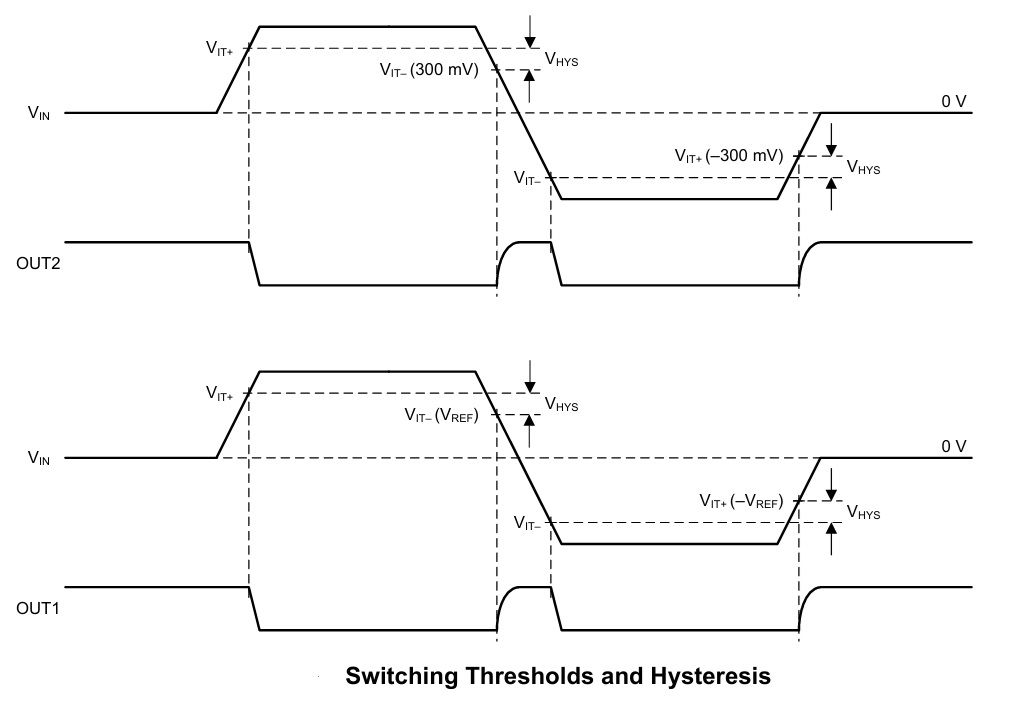
The AMC23C14 is a dual, isolated window comparator with a short response time. The open-drain outputs are separated from the input circuitry by an isolation barrier that is highly resistant to magnetic interference. This barrier is certified to provide reinforced galvanic isolation of up to 5 kVRMS according to VDE 0884-17 and UL1577, and supports a working voltage of up to 1 kVPK.
Both comparators have windows that are centred around 0 V, meaning that the comparators trip if the input exceeds the thresholds in a positive or negative direction. One comparator has fixed thresholds of ±300 mV. The second comparator has adjustable thresholds from ±20 mV to ±300 mV through a single external resistor.
The AMC23C14 also supports a positive-comparator only mode. When the voltage on the REF pin is greater than 550 mV, the negative comparators are disabled and only the positive comparators are functional. The reference voltage in this mode can be as high as 2.7 V. This mode is particularly useful for monitoring positive voltage supplies.
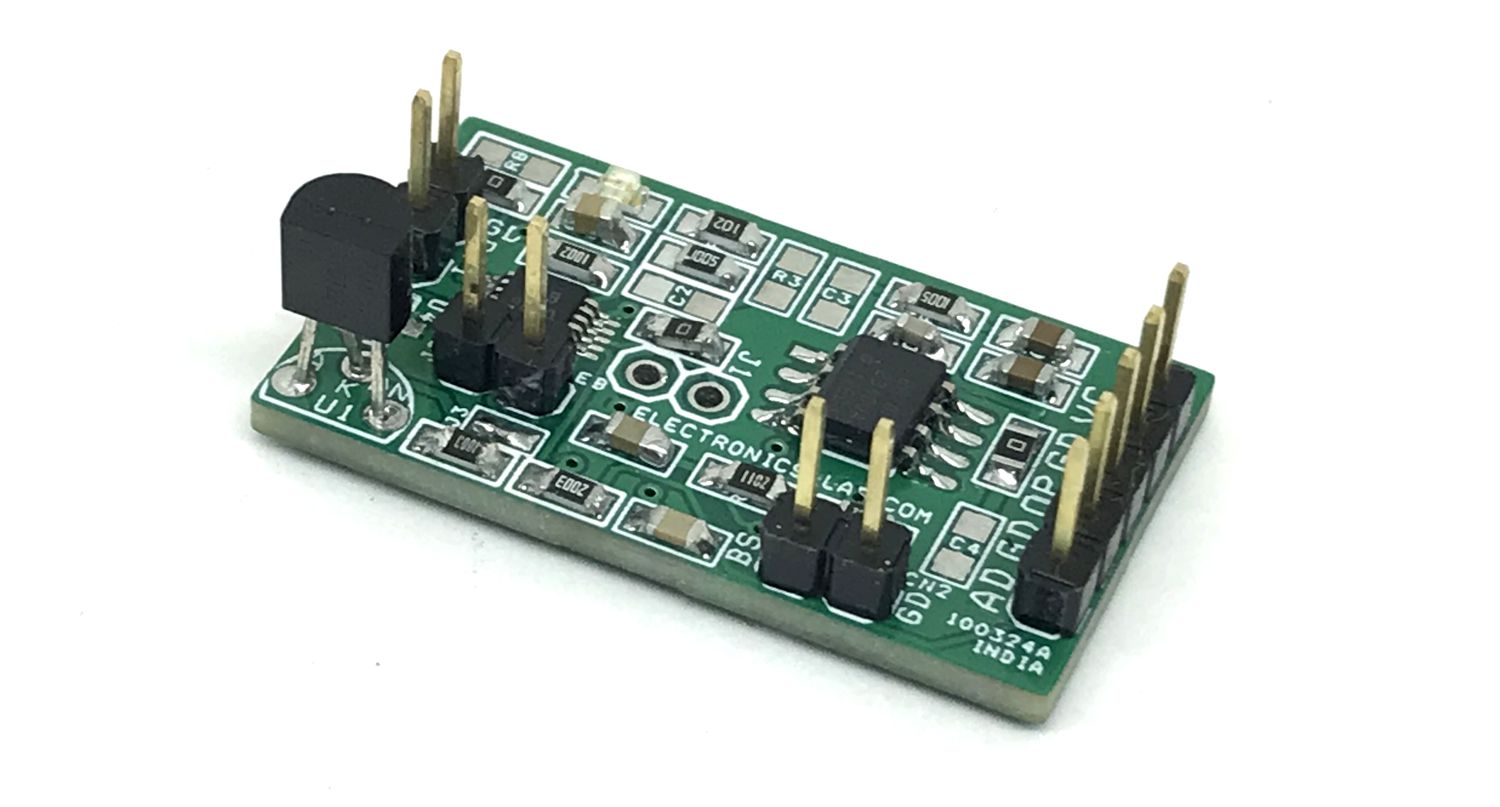
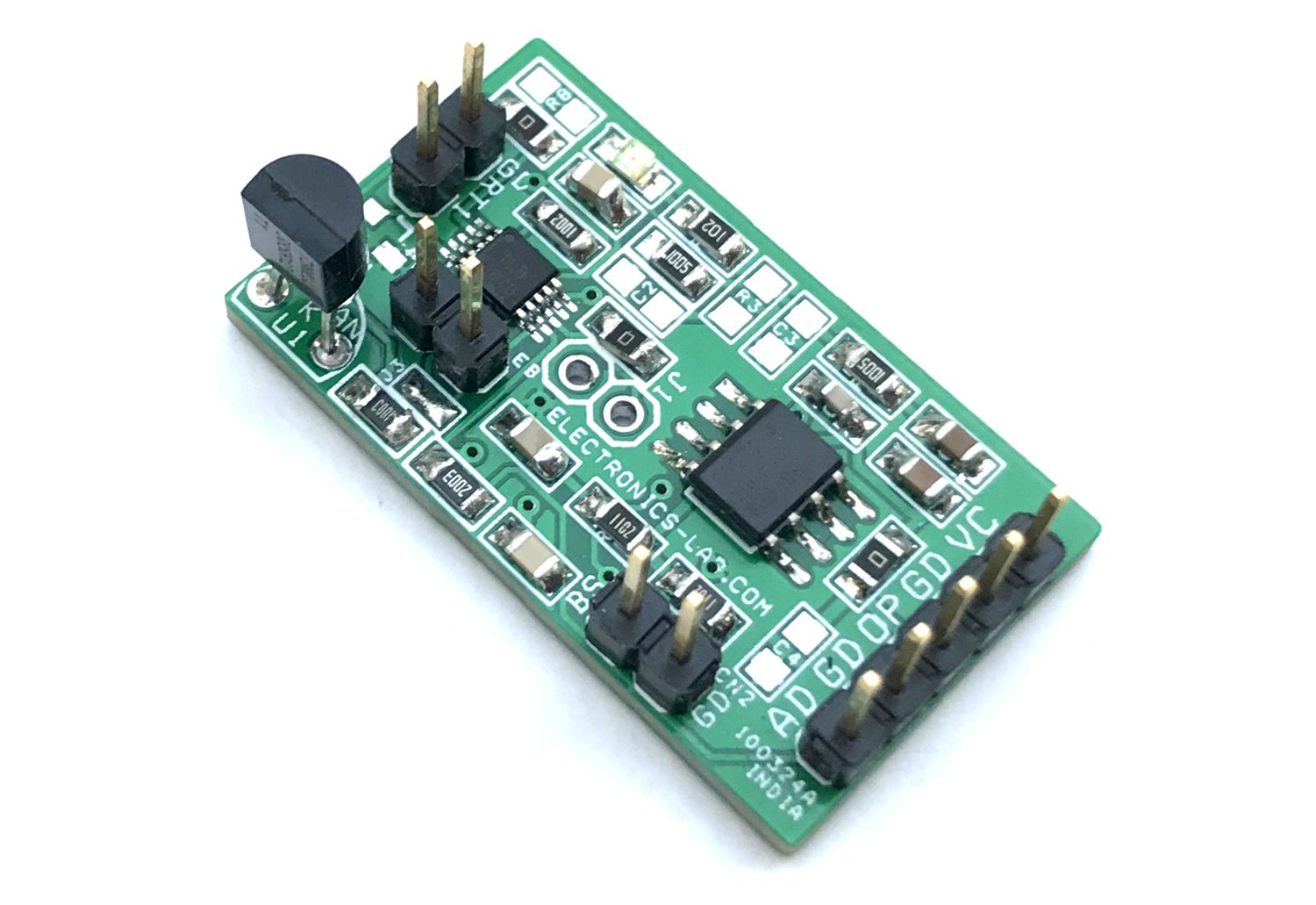
This is a simple Proportional, Integral (PI) temperature control amplifier. A complete thermoelectric cooler (TEC) controller can be created using this PI amplifier and OPA569 Power Op-Amp or other output amplifiers such as DRV591, DRV592 and DRV593. Proportional-integrator compensation is simpler to adjust and often provides an adequate thermal transient response to the TEC driver amplifiers. The project consists INA330 chip and OPA2340 OPAMP. The INA330 provides thermistor excitation and generates an output voltage proportional to the difference in resistances applied to the inputs. OPA2340 is used to create the PI closed Loop.
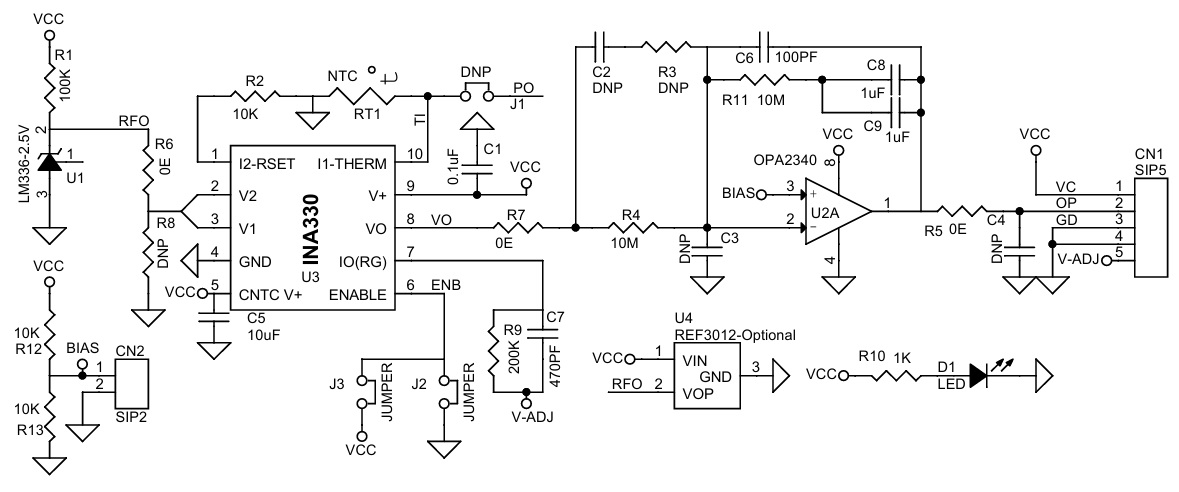
The board is based on application note Figure 8 from the datasheet of INA330. Please Refer to the datasheet of INA330 to learn more about the project and applications.
U1 LM385-1.2V generates the reference voltage 1.23V, and REF3012 SOT23-2 U4 chip can be used as an alternative to U1. PI loop compensation can be optimized for loop stability and best response to thermal transients by adjusting R4, R11, C8, and C9. To facilitate the optimization of loop dynamics, the value of these components is important and will depend on the Thermal behavior of the TEC.
Features
Supply 5V DC
NTC Temperature Sensor
Compact Design
Precision Temperature Sensor Amplifier
On Board 1.23V Reference
On Board Power LED
PCB Dimensions 31.75 x 18.42 mm
INA330 uses only one precision resistor R2 plus the thermistor RT1, thus providing an alternative to the traditional bridge circuit. The circuit maintains excellent accuracy for temperature control applications. An excitation voltage is applied to the thermistor (RTHERM) RT1 and precision resistor (RSET) R2, creating currents I1 and I2. The current conveyor circuit produces an output current, I0, equal to I1 – I2, which flows through the external gain-setting resistor. A buffered voltage output proportional to I0 is also provided. The loop controls temperature to an adjustable set-point of 22.5°C to 27.5°C. The nominal 10kΩ at 25°C thermistor ranges from approximately 11.4kΩ to 8.7kΩ over this range. A 1.23V excitation voltage is applied to V1 and V2, producing a nominal 100µA current in the 10kΩ RSET resistor. The thermistor current is approximately 100µA at 25°C, but will vary above or below this value over the ±2.5°C set-point temperature range. The difference of these two currents flows in the gain-set resistor, RG. This produces a voltage output of approximately 0.9V/°C. The set-point temperature is adjusted with VADJ. Thus, the voltage at VO is the sum of (IO)(RG) + VADJ. VADJ can be manually adjusted or set with a Digital-to-Analog (D/A) converter. Optionally, Thus, the feedback loop will drive the heating or cooling of the TEC to force VO to equal VBIAS. VADJ = 2.5V will produce a set-point temperature of 25°C. VADJ = 2.5V + 0.9V will change the set-point by 1°C. A 0V to 5V D/A converter will provide approximately ±2.5°C adjustment range. A 12-bit D/A converter will allow for approximately 0.001°C resolution on the set-point temperature. For best temperature stability, the set-point temperature voltage should be derived ratiometrically from VBIAS. A D/A converter used to derive the set-point voltage should share the same reference voltage source as VBIAS. Likewise.
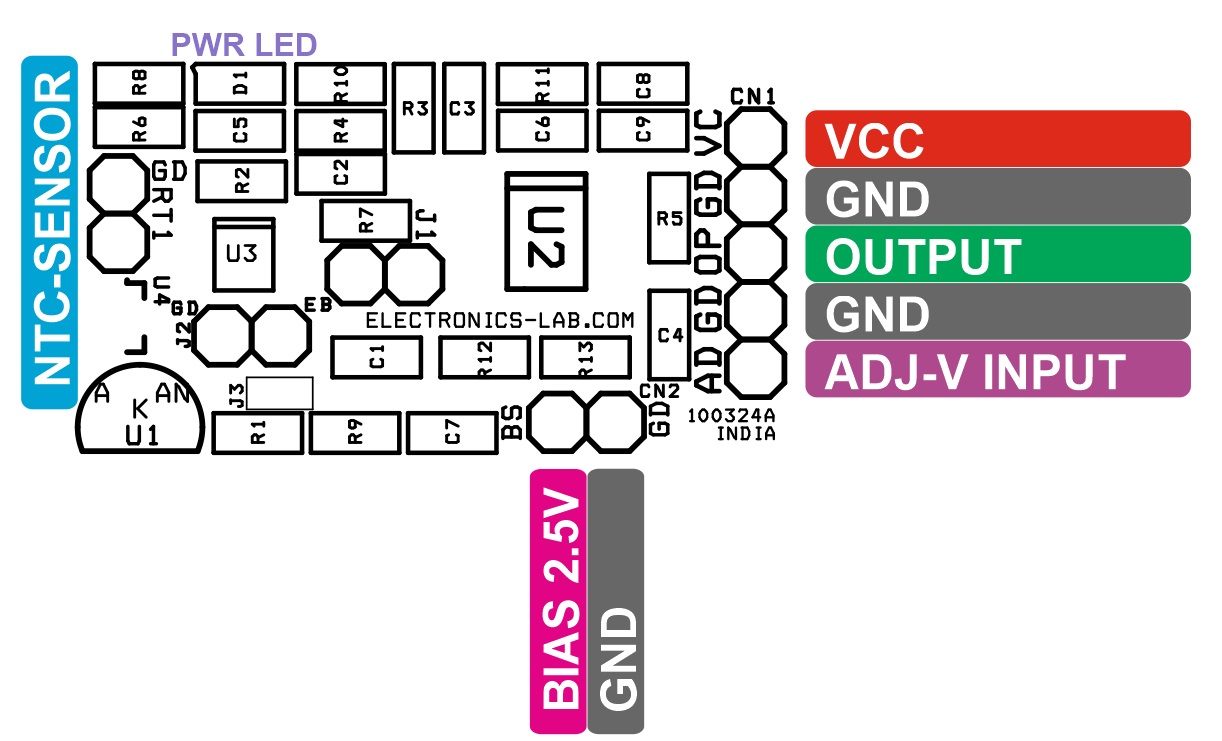
Connections and Other Information
CN1: Pin 1 = 5V DC, Pin 2 = Output, Pin 3 = GND, Pin 4 = GND, Pin 5 = V-ADJ 0 to 5V from DA Converter
CN2: For High Accuracy Omit R12 and R13 and Feed 2.5V External Reference Voltage to Pin 1 , Pin = GND
J1: No Use
J2: Disable
J3: Enable (Solder Jumper)
U1: Reference Voltage Generator, Use Alternate U4 REF3012 SOT23-3
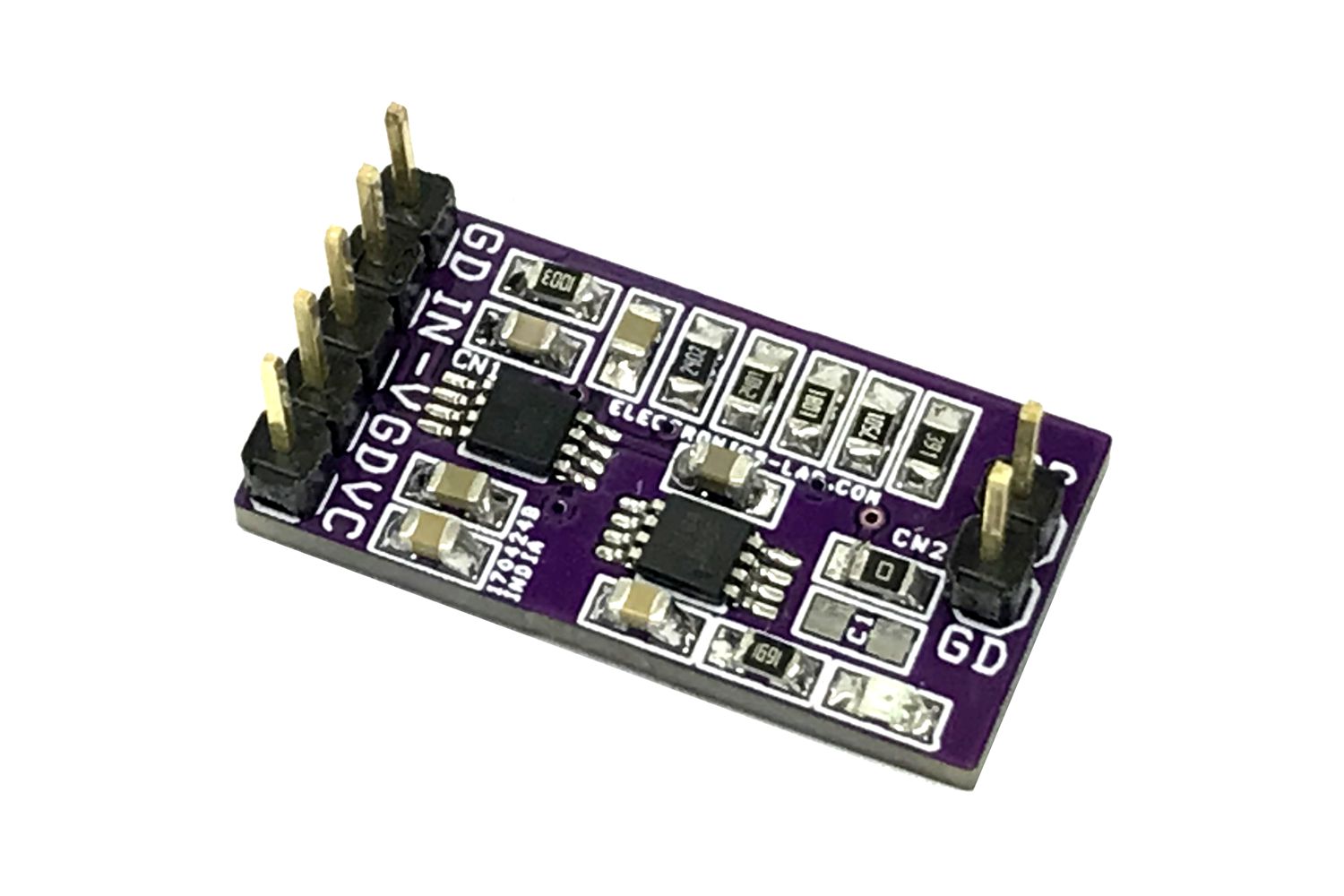
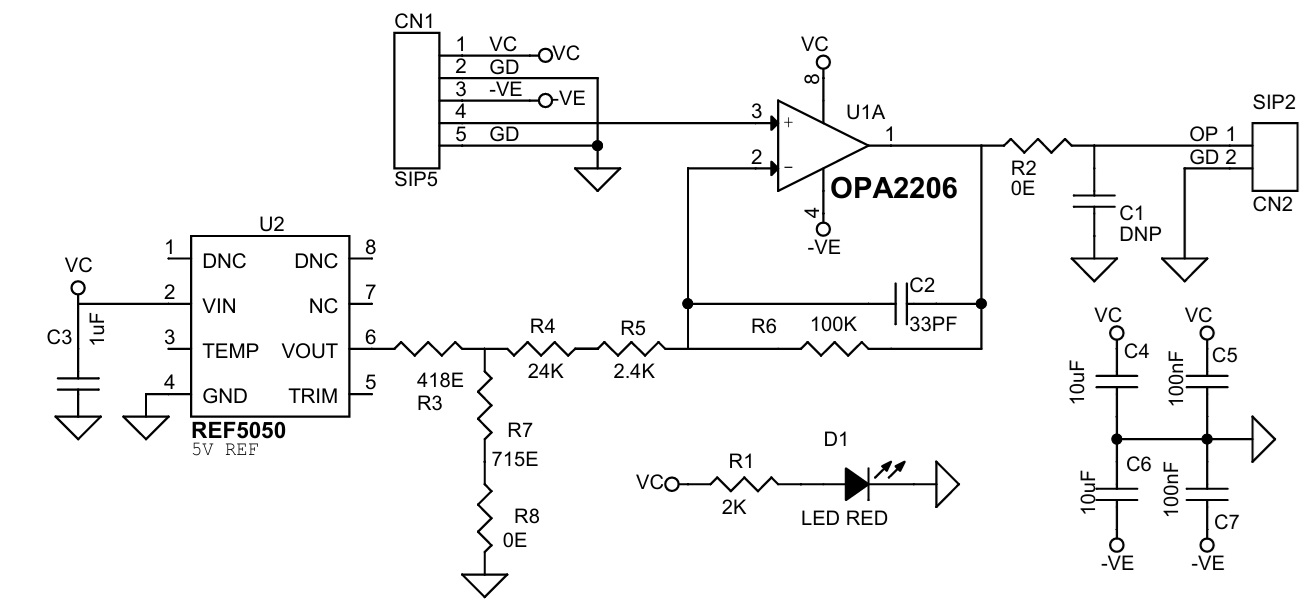
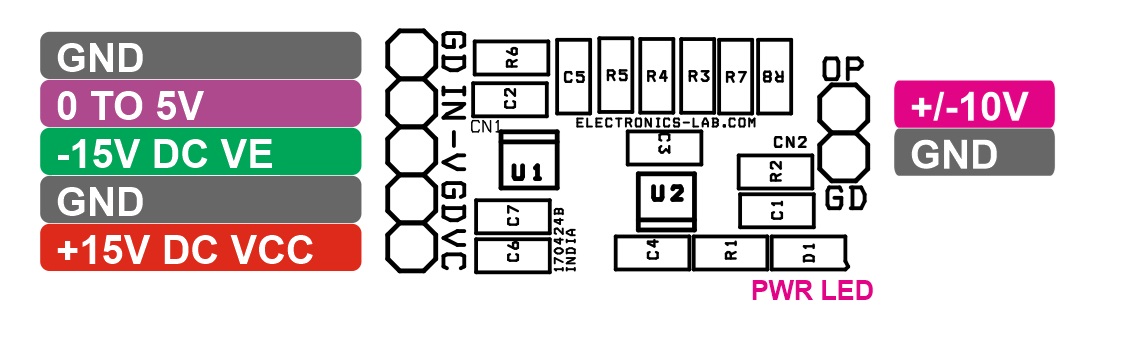
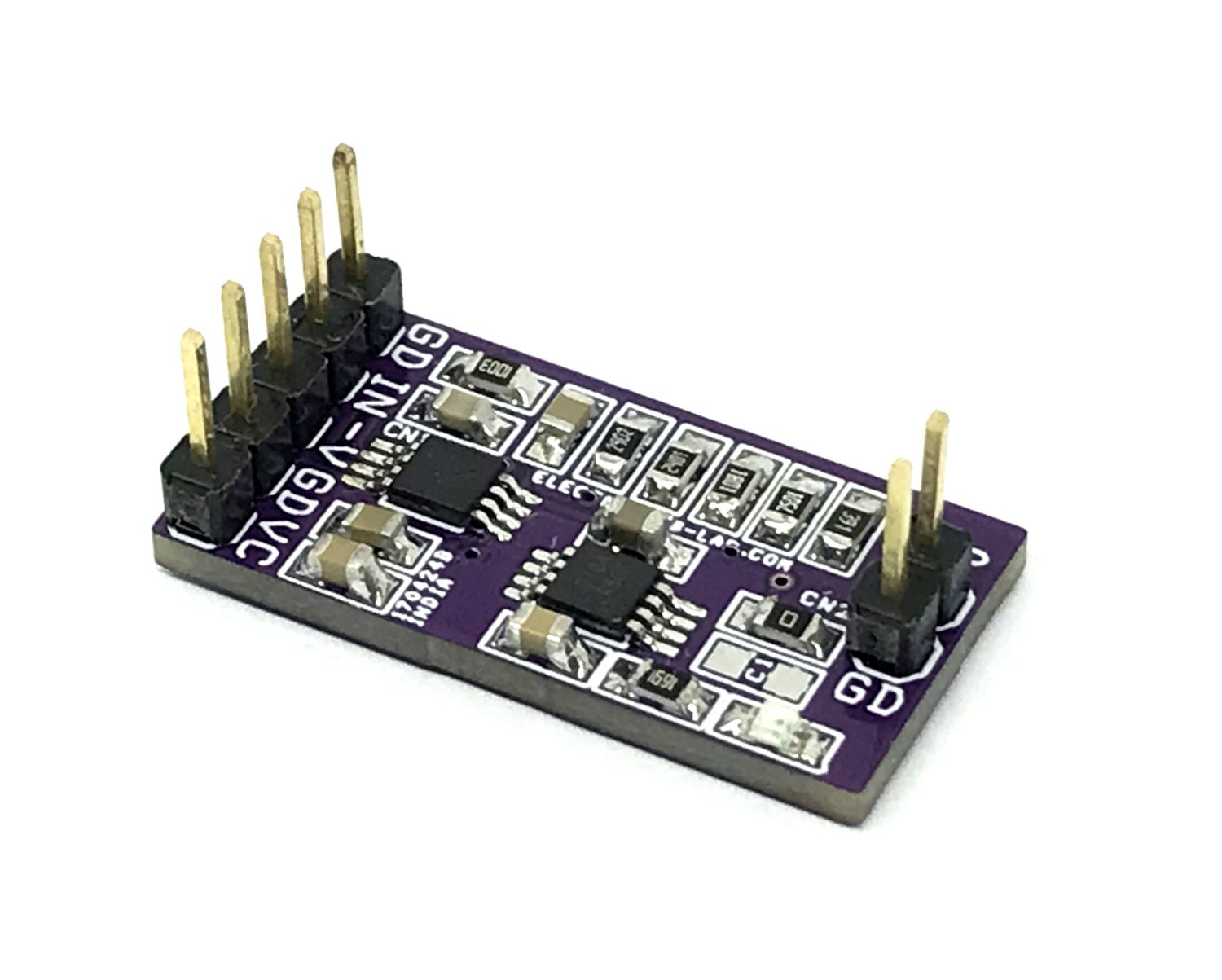
This design is intended to translate a small unipolar signal to a wide bipolar signal. A common application is to translate a 0 to 5V DAC output to a ±10V bipolar signal. All resistors are 1% but it is advisable to select 0.1% 20 ppm/°C resistors for good gain, offset accuracy, and drift tolerance. A calibration at room temperature can be done to minimize the gain error, but gain drift can only be reduced by minimizing the resistor drift (choosing resistors with TC ≤ 20 ppm/°C). The project is built using OPA2206 Precision, bipolar, e‑trim OPAMP. REF5050 provides 5V reference voltage to OPAMP. The board works with a dual ±15V DC Power Supply.
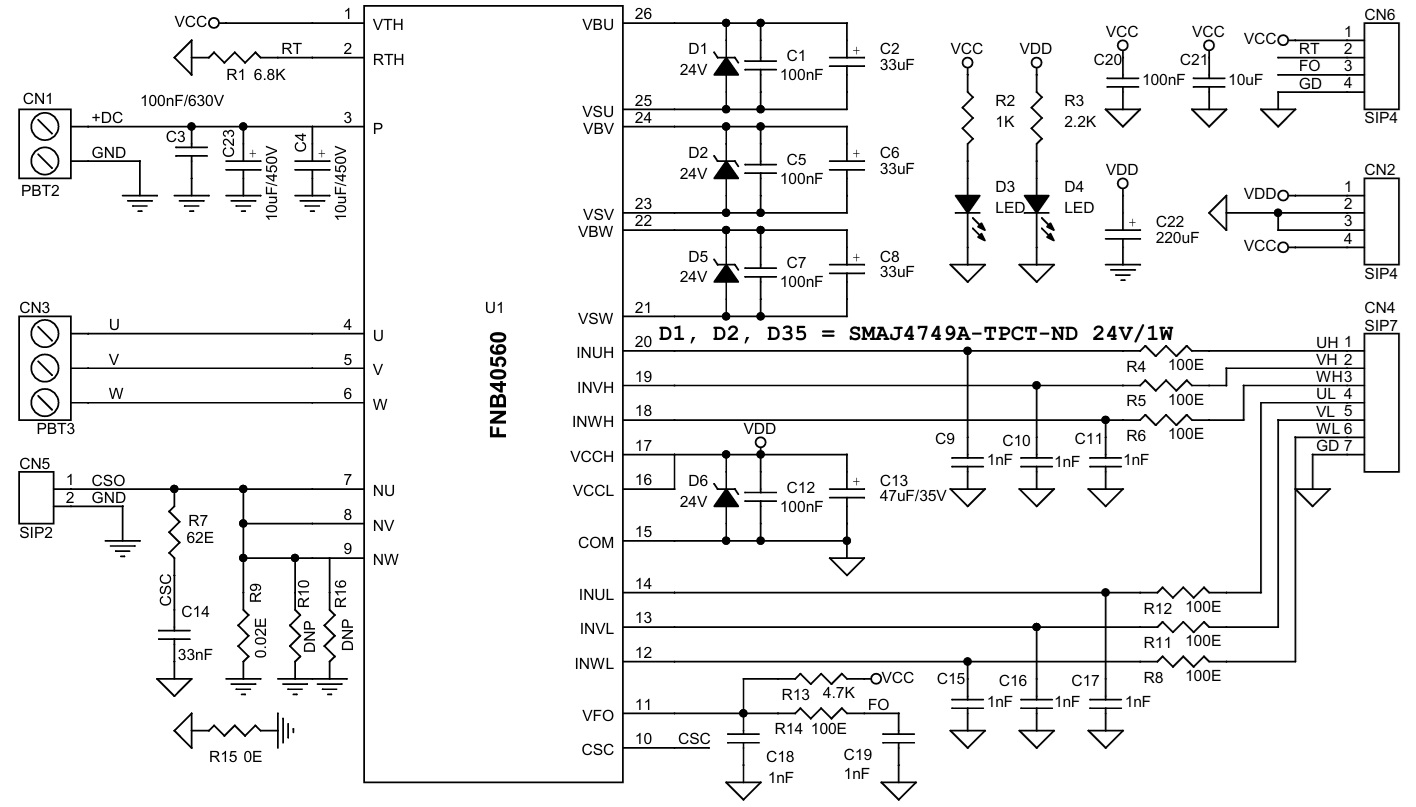
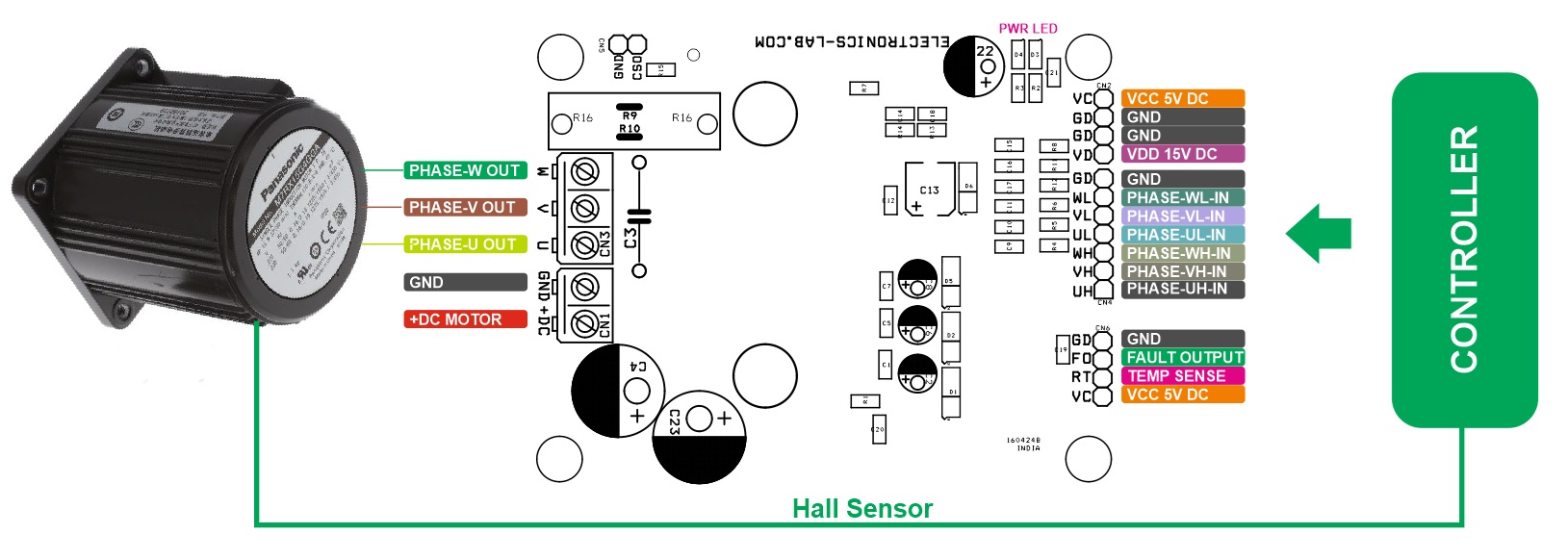
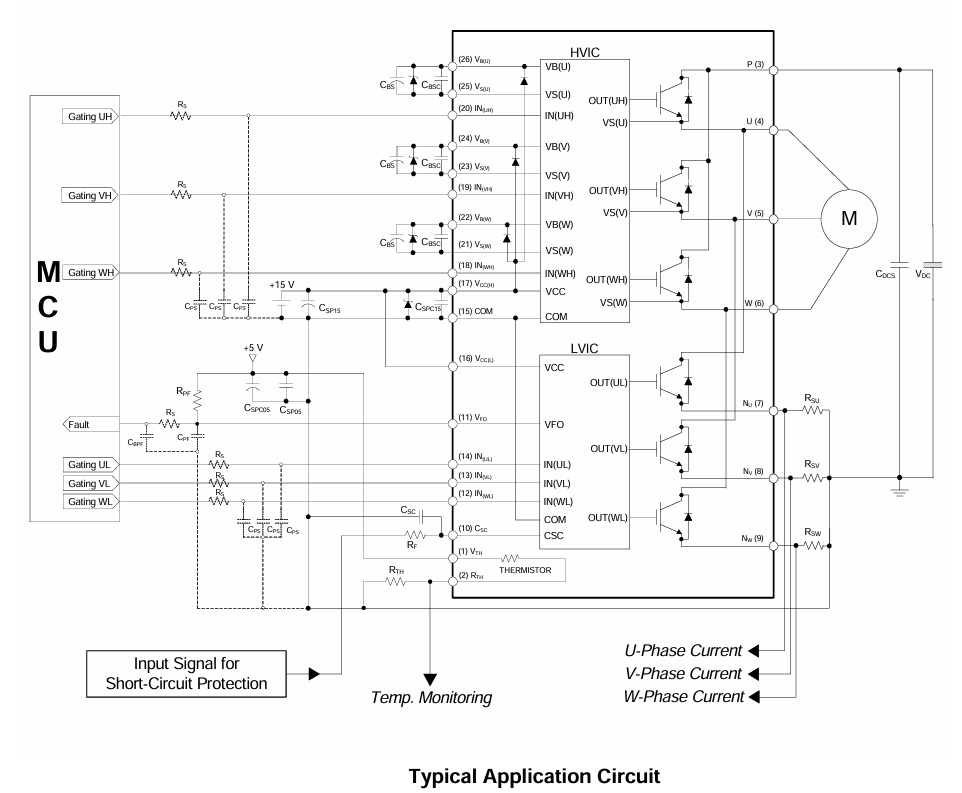
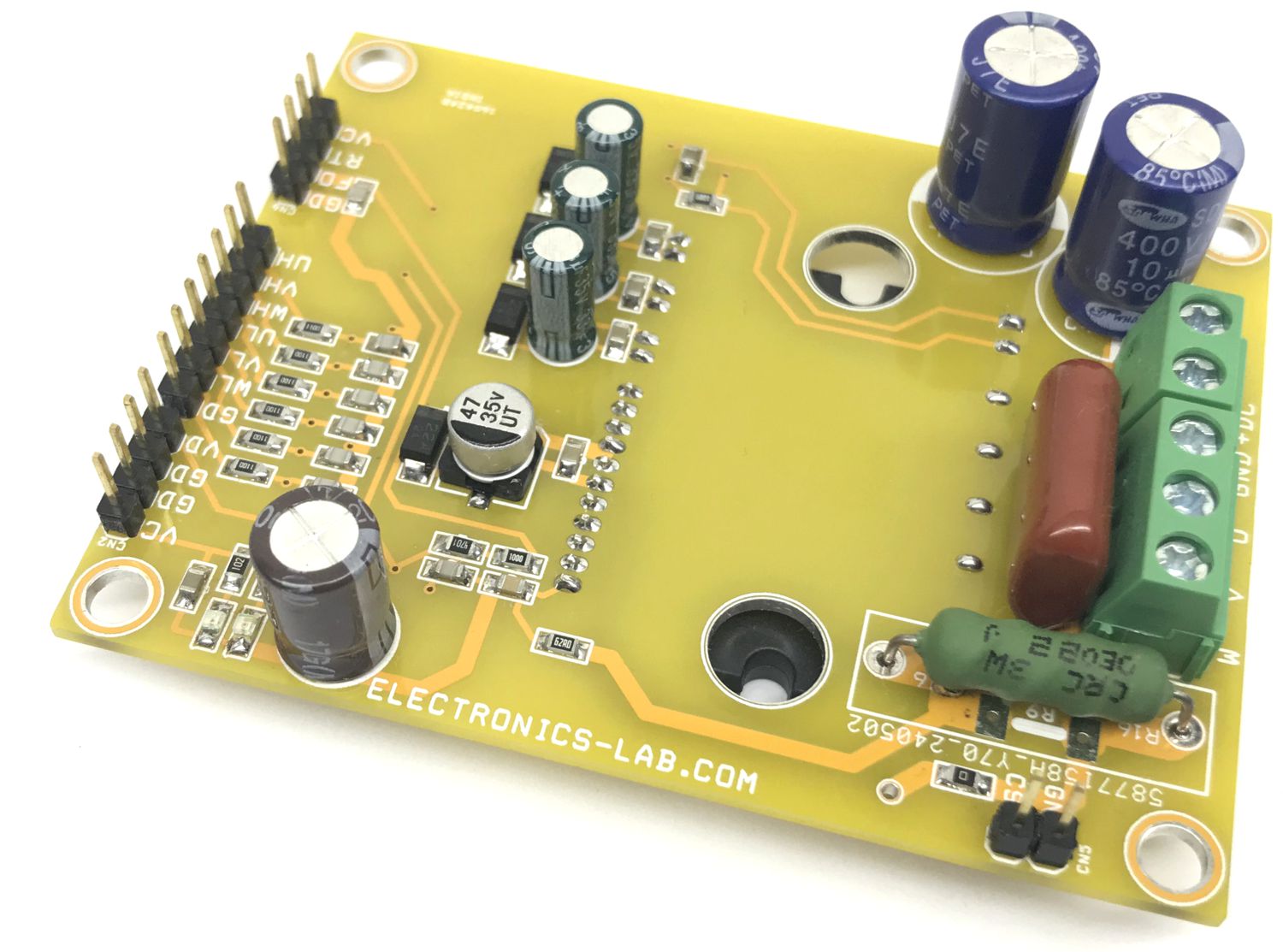
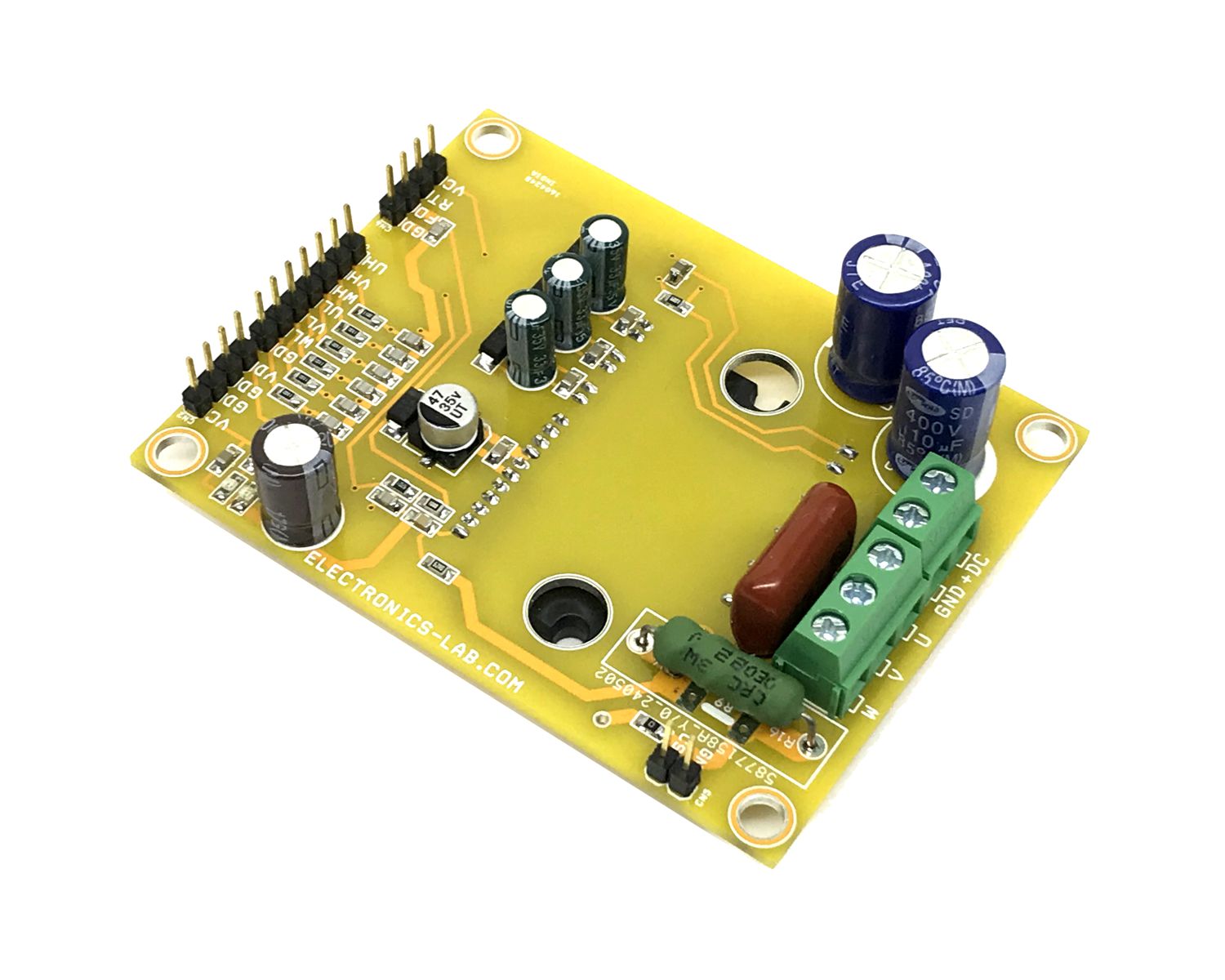
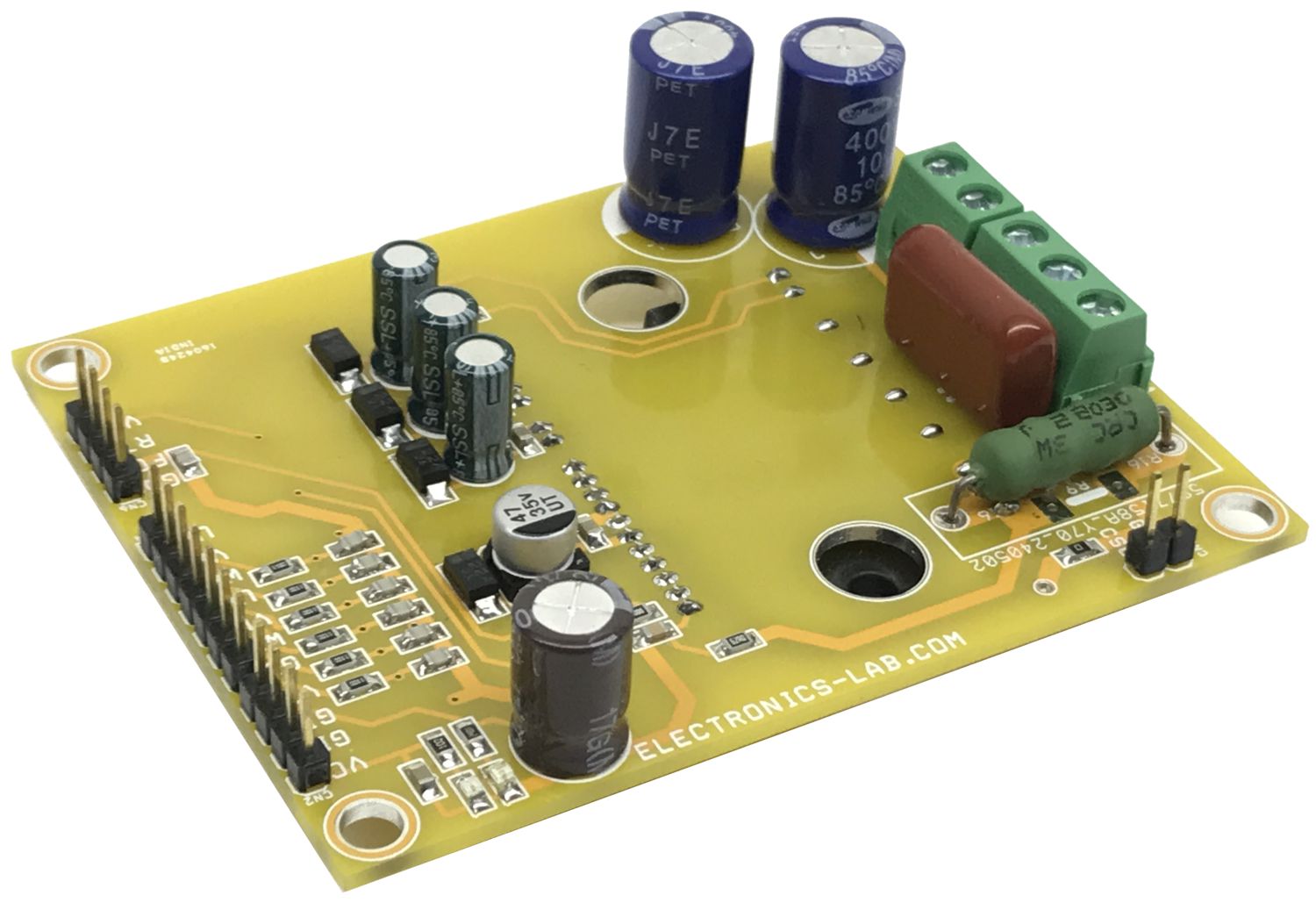
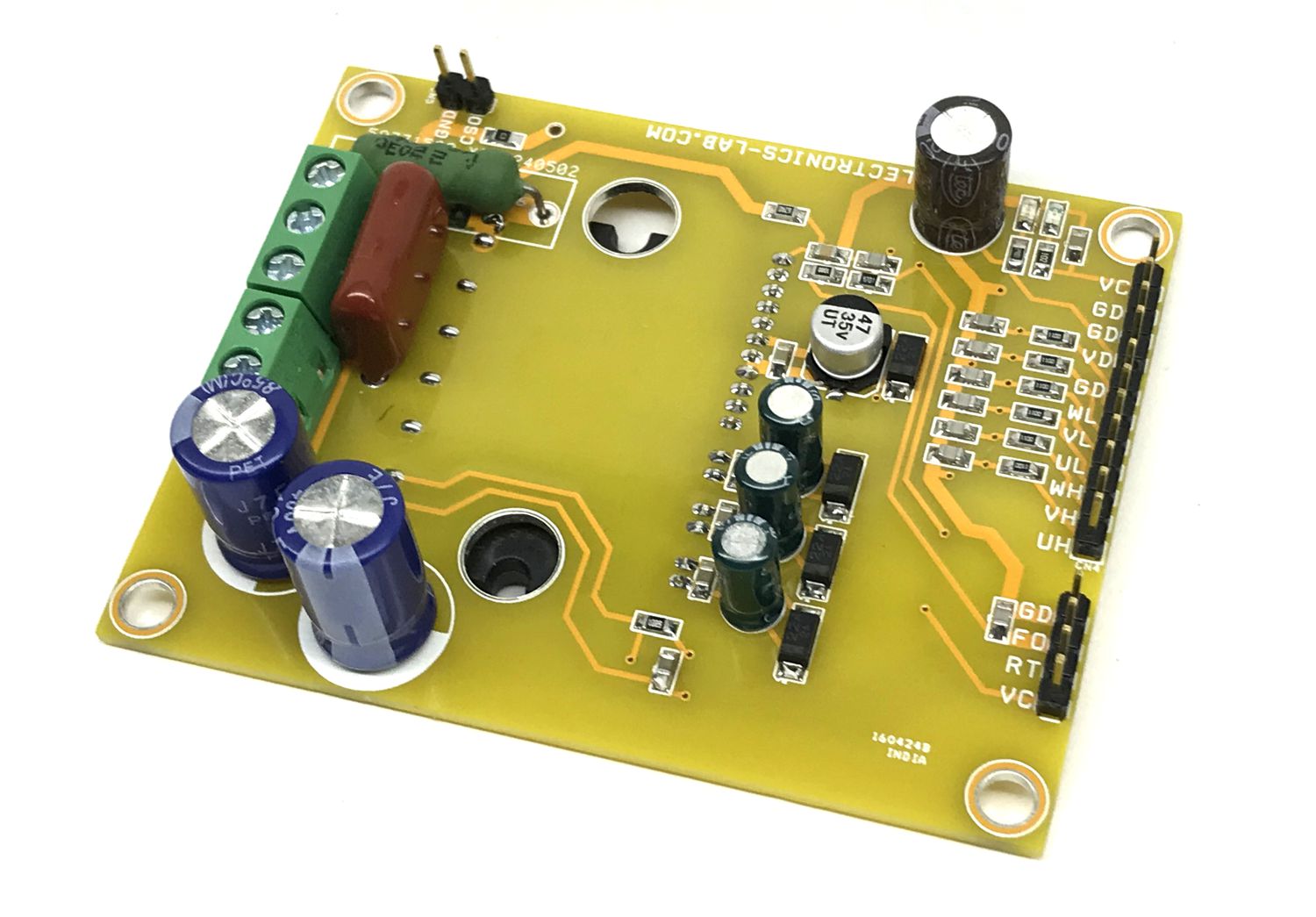
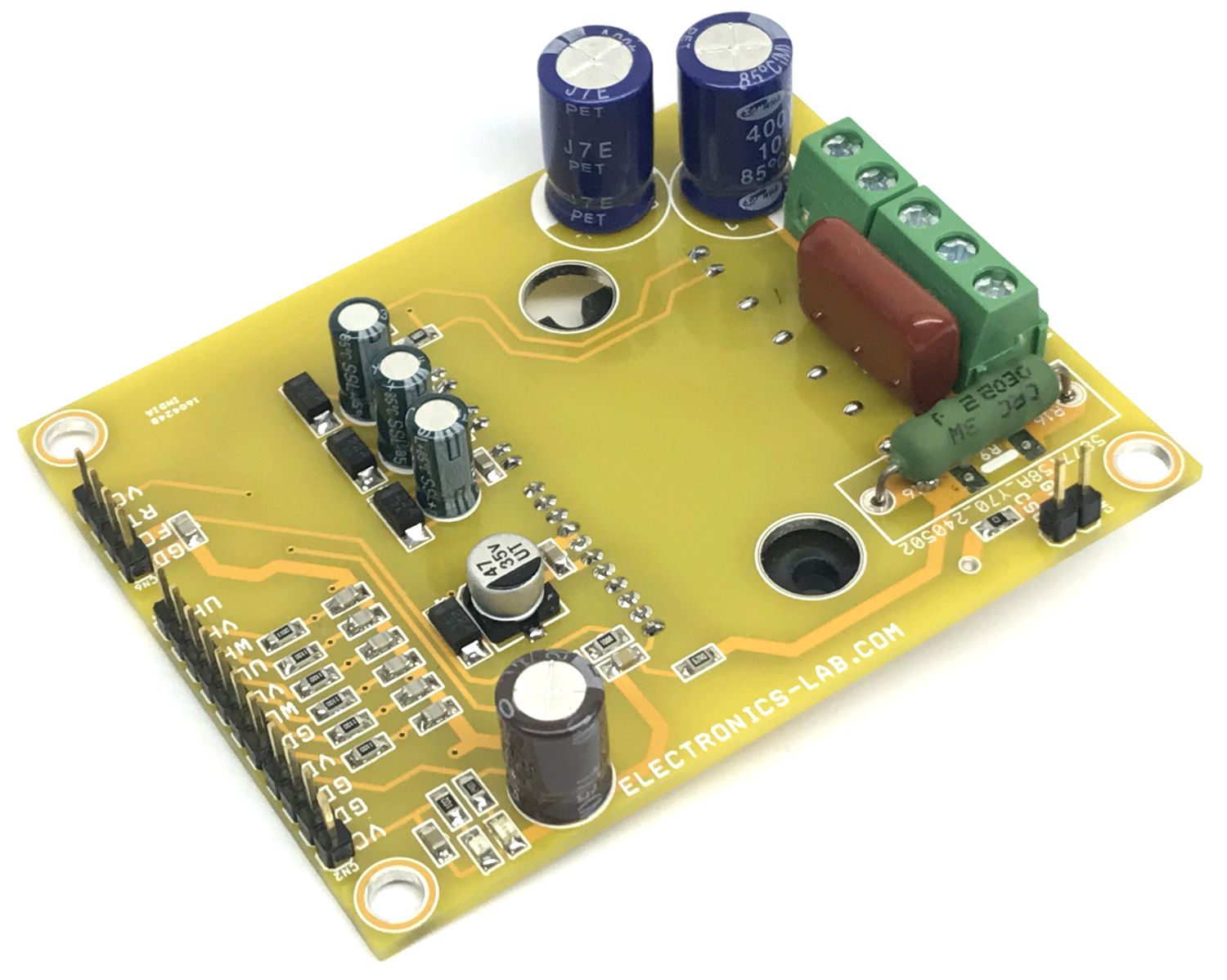
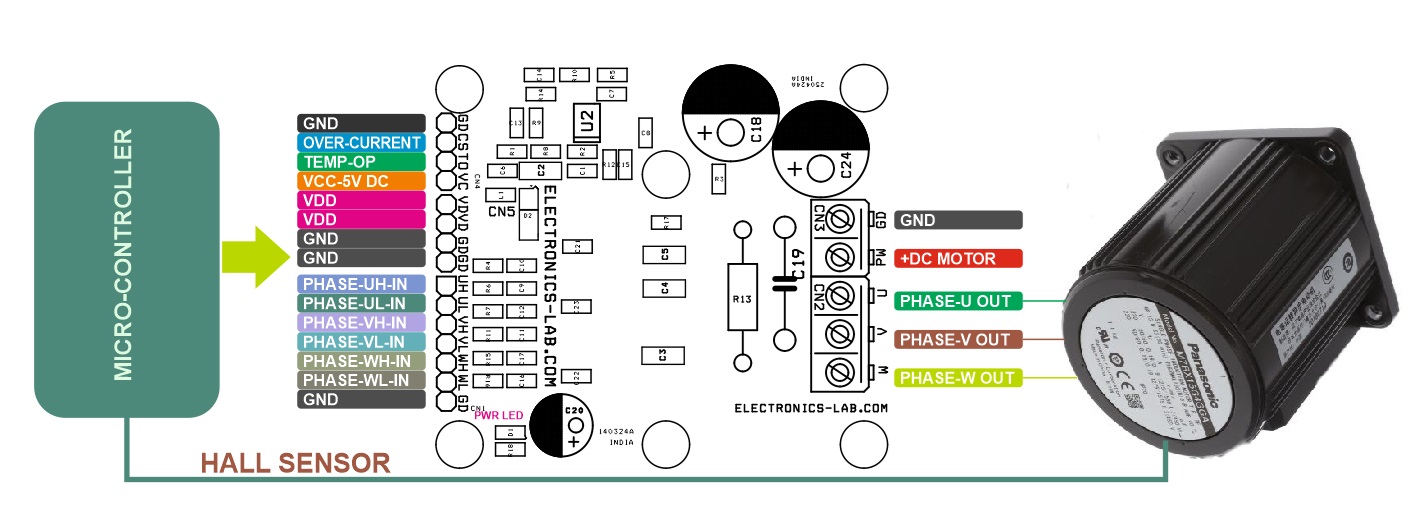
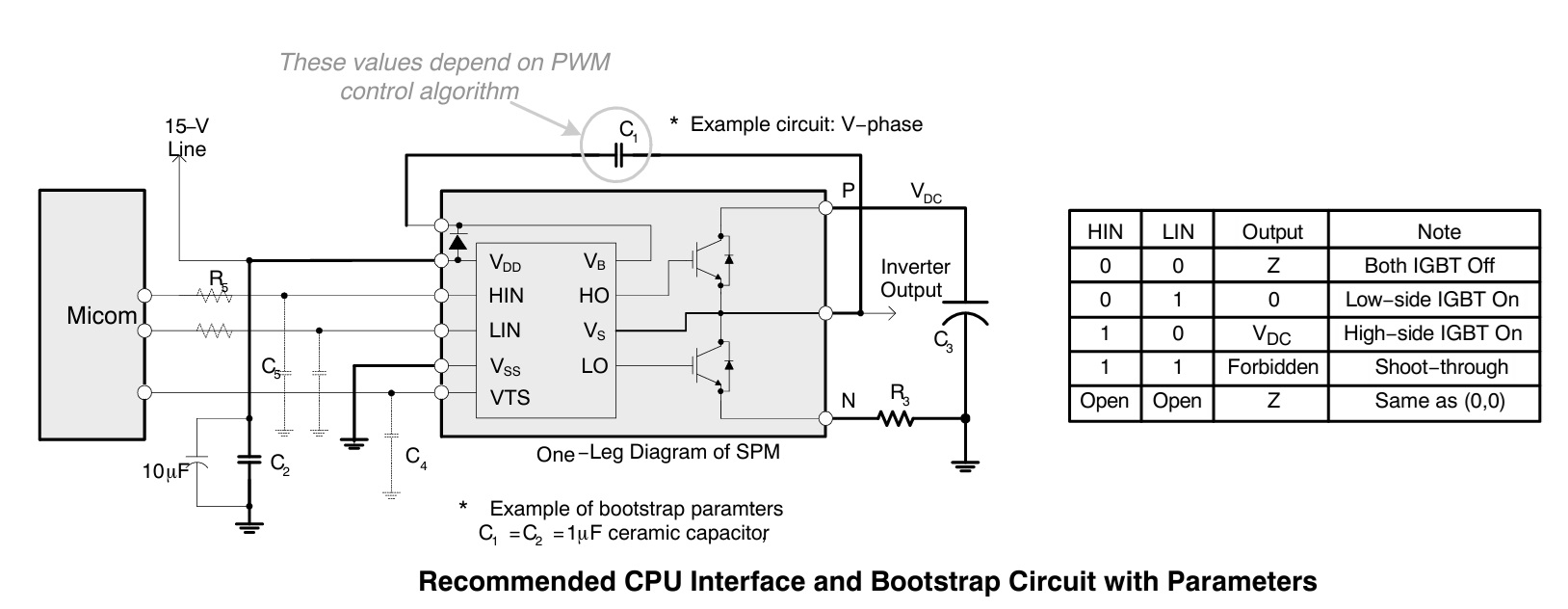
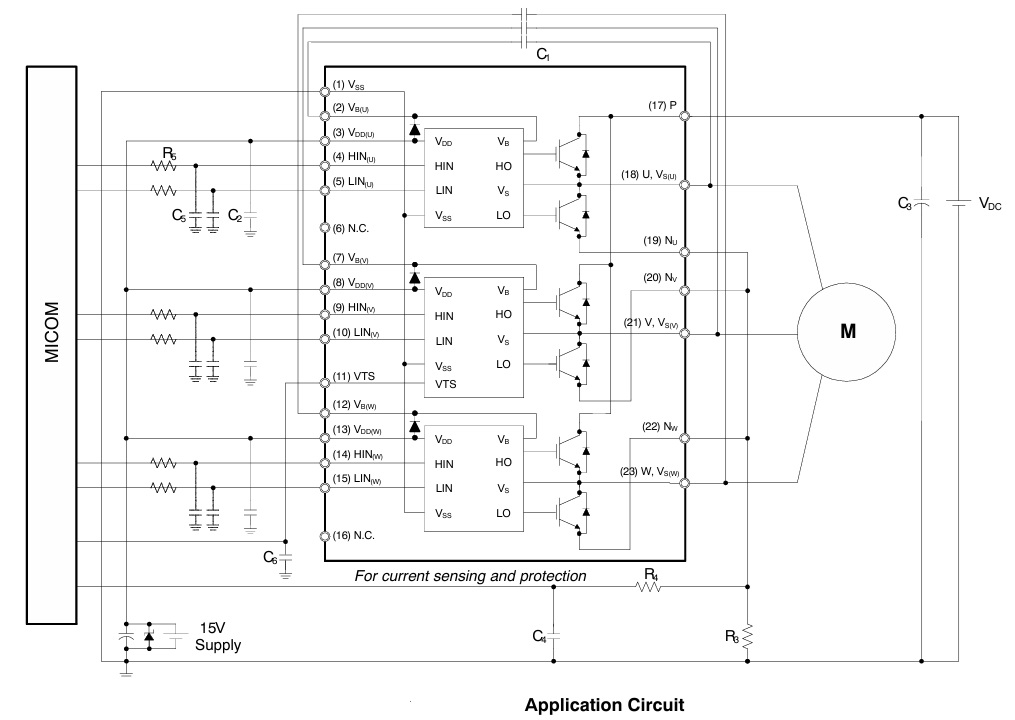
This is a Smart power module project designed for Small Power AC Motors. The FNB40560 chip is the heart of the project. A compact inverter project is ideal for small power motors such as fans and pumps. H-bridge configuration can also be created for low current high-voltage brushed DC motors. The Inverter project supports loads up to 5A. The DC power supply voltage is up to 400VDC. The project operates with 6 PWM signals. The parameters for bootstrap circuit elements are dependent on the PWM algorithm. For 5 kHz of switching frequency Bootstrap capacitors C2, C6, and C8 value is 33uF. Resistor R4, R5, R6, R12, R11, R8 and capacitor C9, C10, C11, C15, C16, C17 prevent improper signal due to surge-noise. ATS pin is provided to monitor the temperature of the IPM. A heatsink is needed for the IPM chip during operation or testing.
Note: The project operates with lethal voltage, user must take care of safety and all necessary precautions before testing the project.
Operation Truth Table
HIN 0, LIN 0 = Output Z Both MOSFET Off
HIN 0, LIN 1 = Output 0 Low Side MOSFET On
HIN 1, LIN 0 = Output VDC High Side MOSFET On
HIN 1, LIN 1 = Forbidden Shoot Through
Features
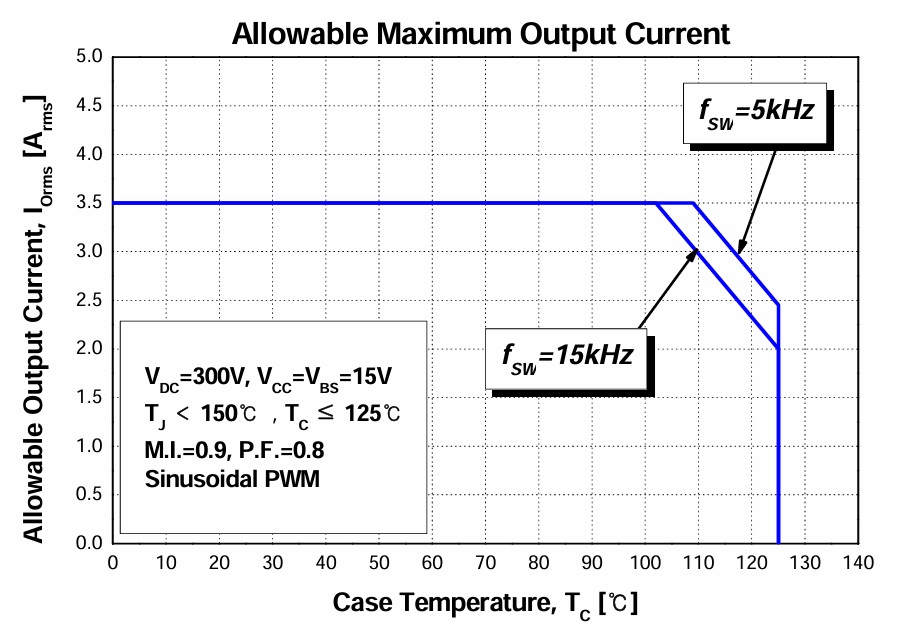
Load Power Supply Up to 400V DC -+DC
Load Current Continues 5A
Logic Supply 15V DC (Gate Driver Circuit)-VDD
Power Supply for Temperature sense Circuit 5V DC-VCC
SCP, Over Current Trip Level 0.5V
Input Frequency up to 20Khz (Choose Right Bootstrap Capacitor)
Power Supply for Over Current Circuit (Comparator CN5) 5V DC
One Board Power LED for Logic Supply
Shunt Based Over Current Feedback Output
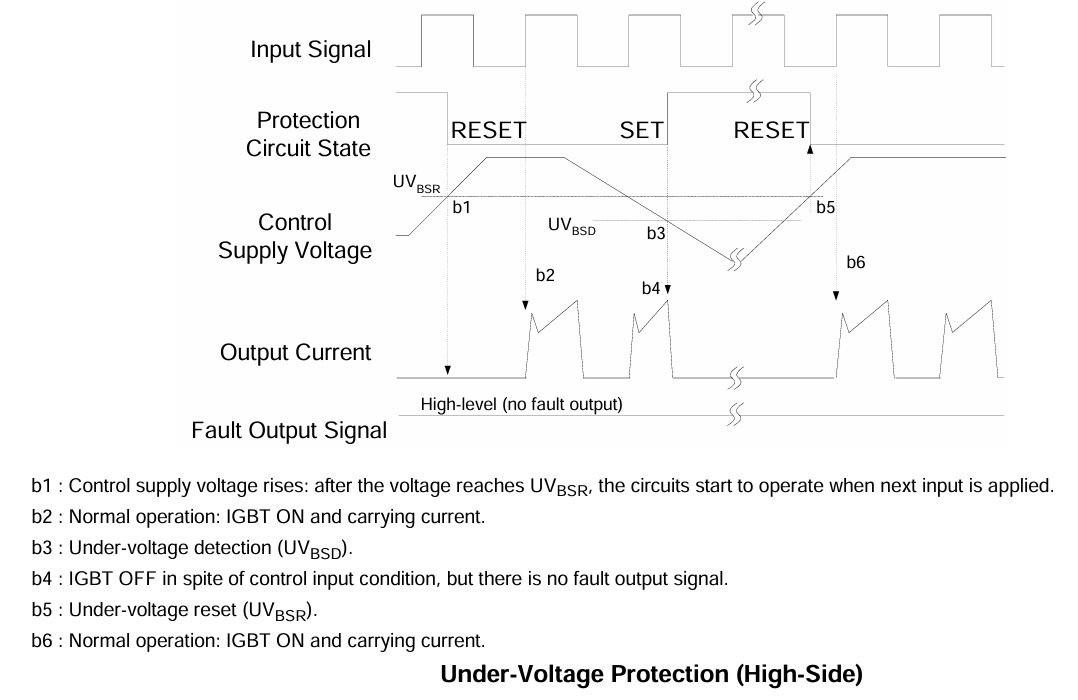
HVIC for gate driving and under-voltage protection
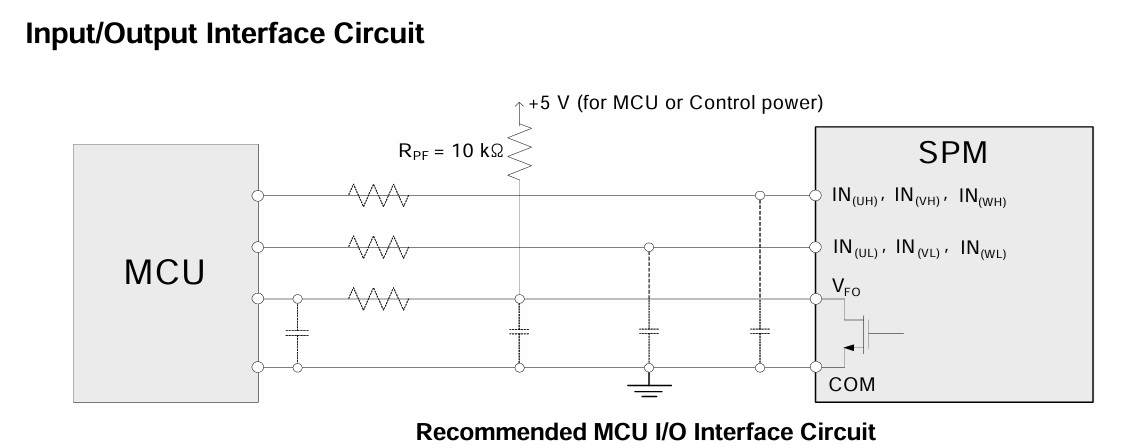
Active-High interface, can work with 3.3V/5V logic (PWM Signals)
These pins are activated by voltage input signals. The terminals are internally connected to the Schmitt trigger circuit.
The signal logic of these pins is active HIGH; the MOSFET turns ON when sufficient logic voltage is applied to the associated input pin.
The wiring of each input needs to be short to protect the module against noise influences.
An RC filter is used to mitigate signal oscillations or any noise that traces of input signals may pick up.
Current Sense Resistor (Board provided with dual type of current sense resistor SMD or THT)
SMD 2512 Size 2 x Parallel Resistor
THT Solder Resistor
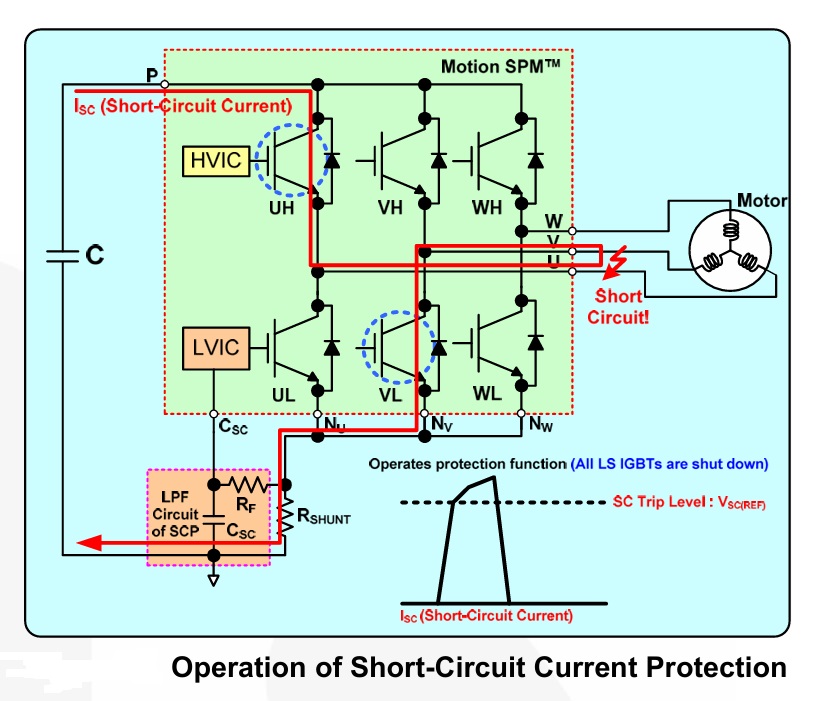
Short-Circuit Current Detection Pins
Pin: CSC
The current-sensing shunt resistor connected between the low-pass filter before the pin CSC and the low-side ground COM to detect short-circuit current
The shunt resistor should be selected to meet the detection levels matched for the specific application. An RC filter R7 and C14 connected to the CSC pin to eliminate noise. Connector CN5 provided for current feedback output, connector is connected across the shunt resistor. Refer Data sheet of IPM for more about trip voltage and shunt resistor.
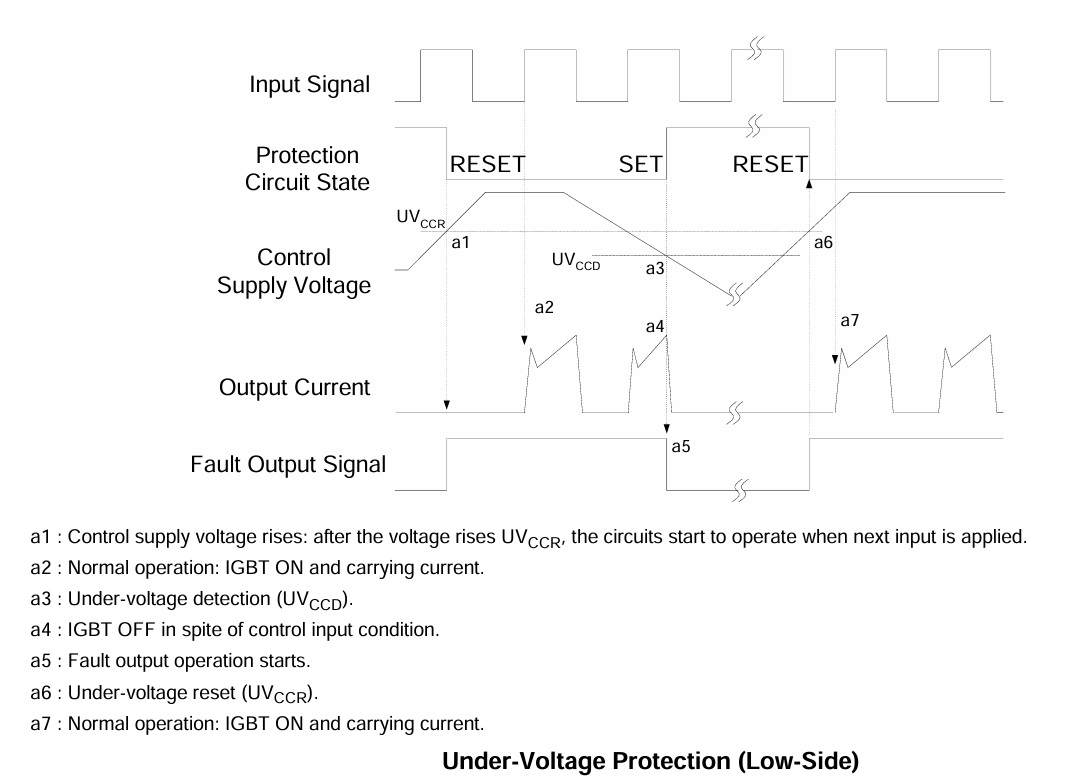
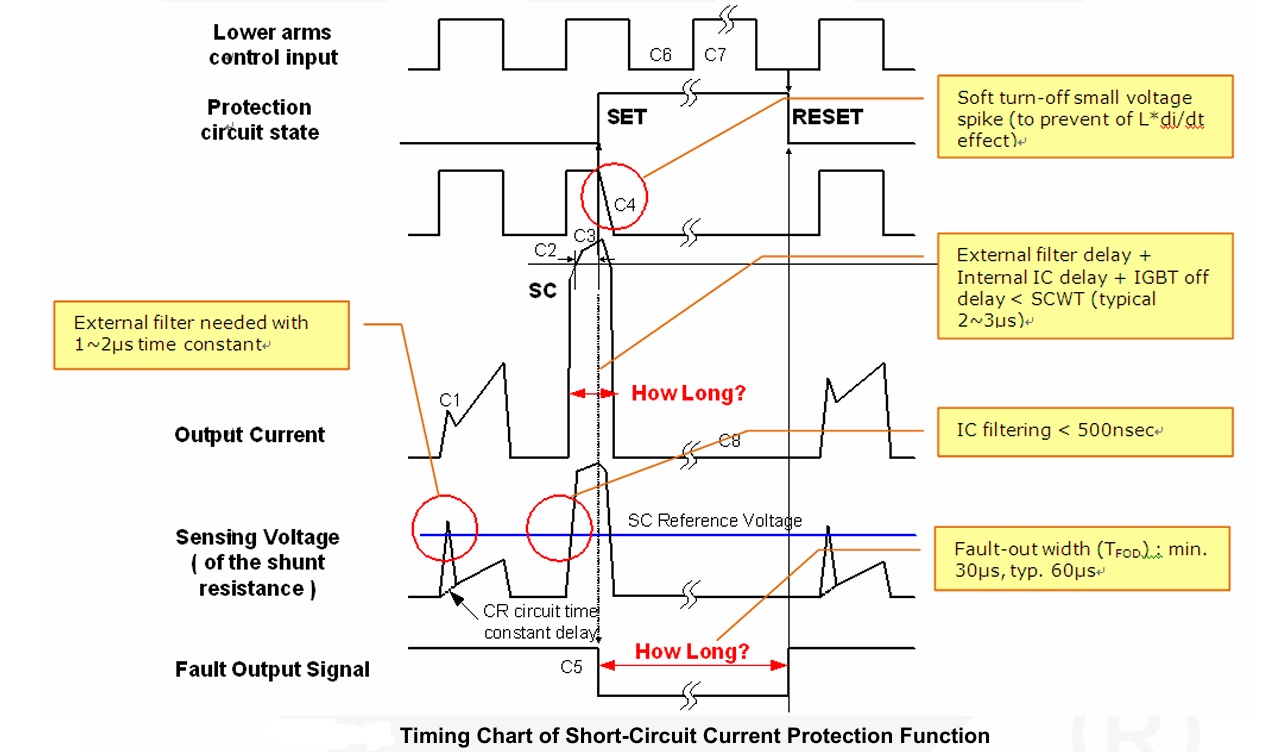
Fault Output Pin (VFO)
The VFO output is open-drain configured. The VFO signal line is pulled up to the 5V logic power supply with approximately 4.7kΩ resistance.
This is the fault output alarm pin. An active LOW output is given on this pin for a fault state condition in the SPM.
The alarmed conditions are SCP (Short-Circuit Current Protection) or low-side bias UVLO (Under Voltage Lockout) operation.
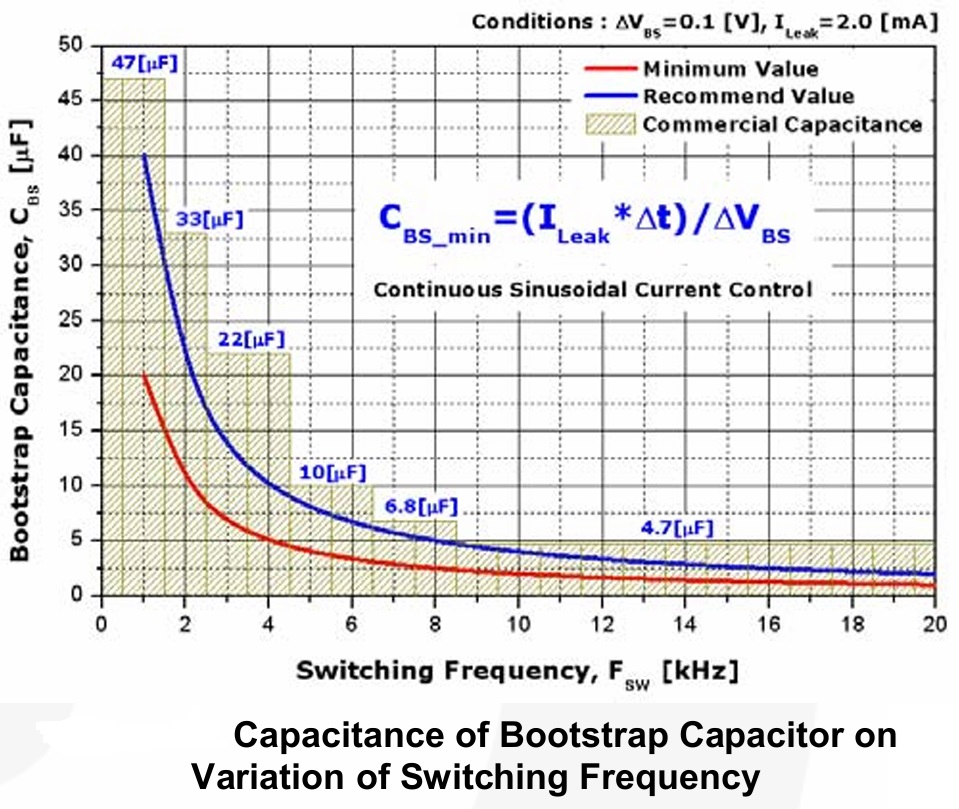
Bootstrap Capacitor, C2, C6, C8
Value of bootstrap capacitor is depended on input frequency, refer the figure Bootstrap Capacitor VS frequency for capacitor selection, also refer data sheet for more info.
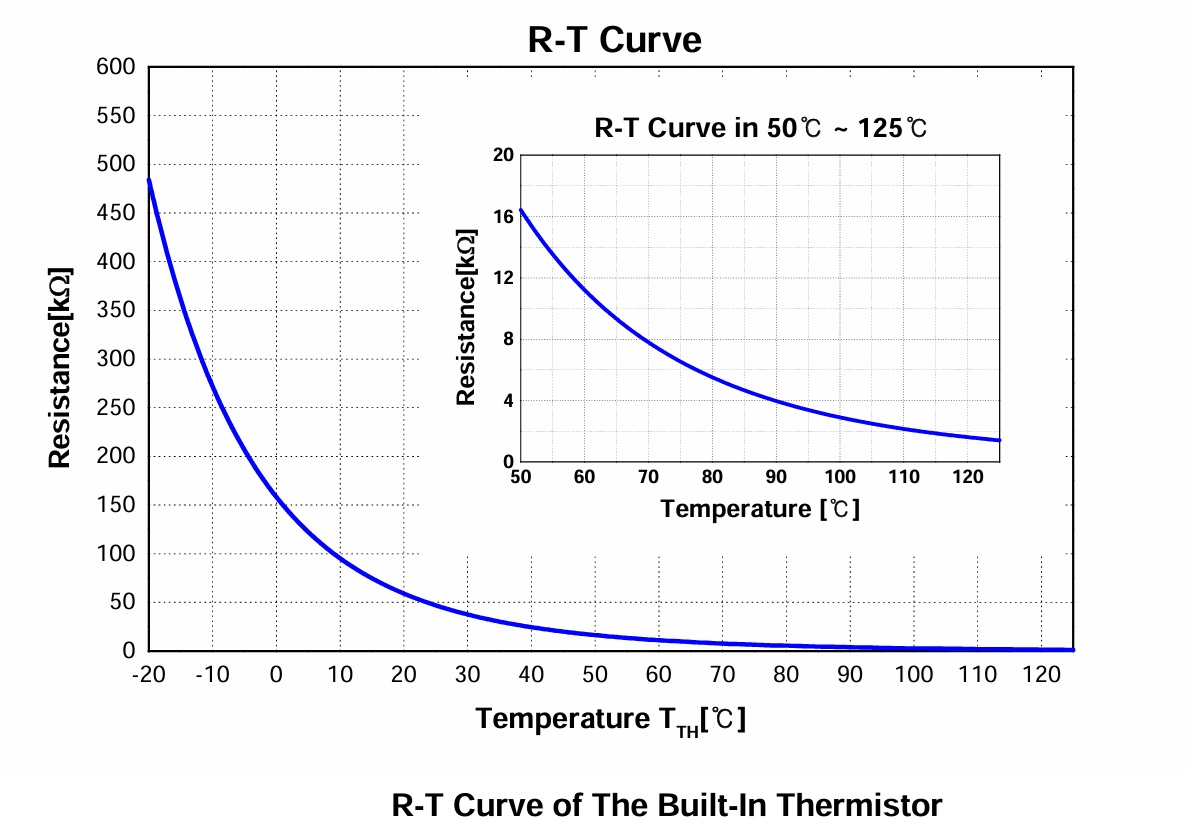
Thermistor Bias Voltage
Pin: VTH
This is the bias voltage pin of the internal thermistor. It is connected to the 5V logic power supply. Series Resistor for the Use of Thermistor (Temperature Detection)
Pin: RTH
For case temperature (TC) detection, this pin connected to an external series resistor R1. Temperature feedback output is available CN6 pin 2.
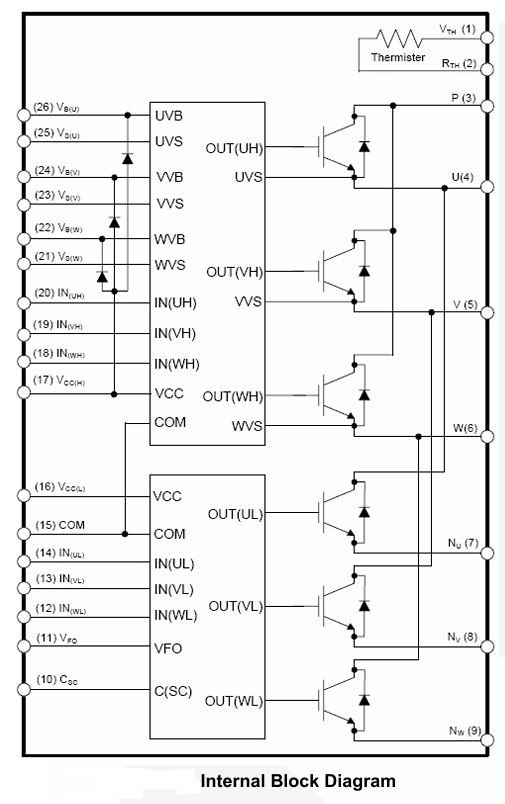
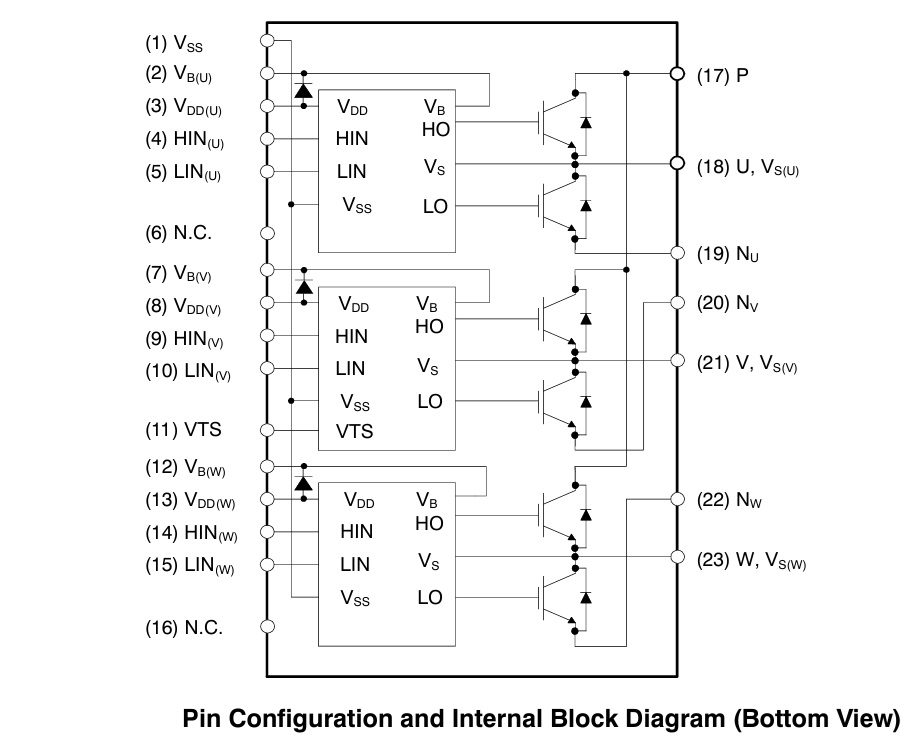
FNB40560 is a Motion SPM® 45 series that ON Semiconductor has newly developed to provide a very compact and high-performance inverter solution for AC motor drives in low-power applications such as refrigerators and dish washers. It combines low-loss short-circuit rated IGBTs and optimized gate drivers in a fully isolated package to deliver a simple and robust design. The system reliability is further enhanced by the built-in NTC for temperature monitoring, integrated under-voltage lock-out function for both high and low side, and an over-current protection input. Three separate open-emitter pins for low side IGBTs make three leg current sensing possible. Built-in bootstrap diodes and dedicated VS pins make PCB layout easy.
Connections
CN1: Pin 1 +DC Motor Power Supply up to 400V DC, Pin 2 = GND
CN2: Pin 1 15V DC for Logic Gate Driver, Pin 2 GND, Pin 3 = GND, Pin 4 = VCC 5V DC for Temperature Sensor
CN3: Pin 1 = Motor Phase U, Pin 2 = Motor Phase V, Pin 3 = Motor Phase W
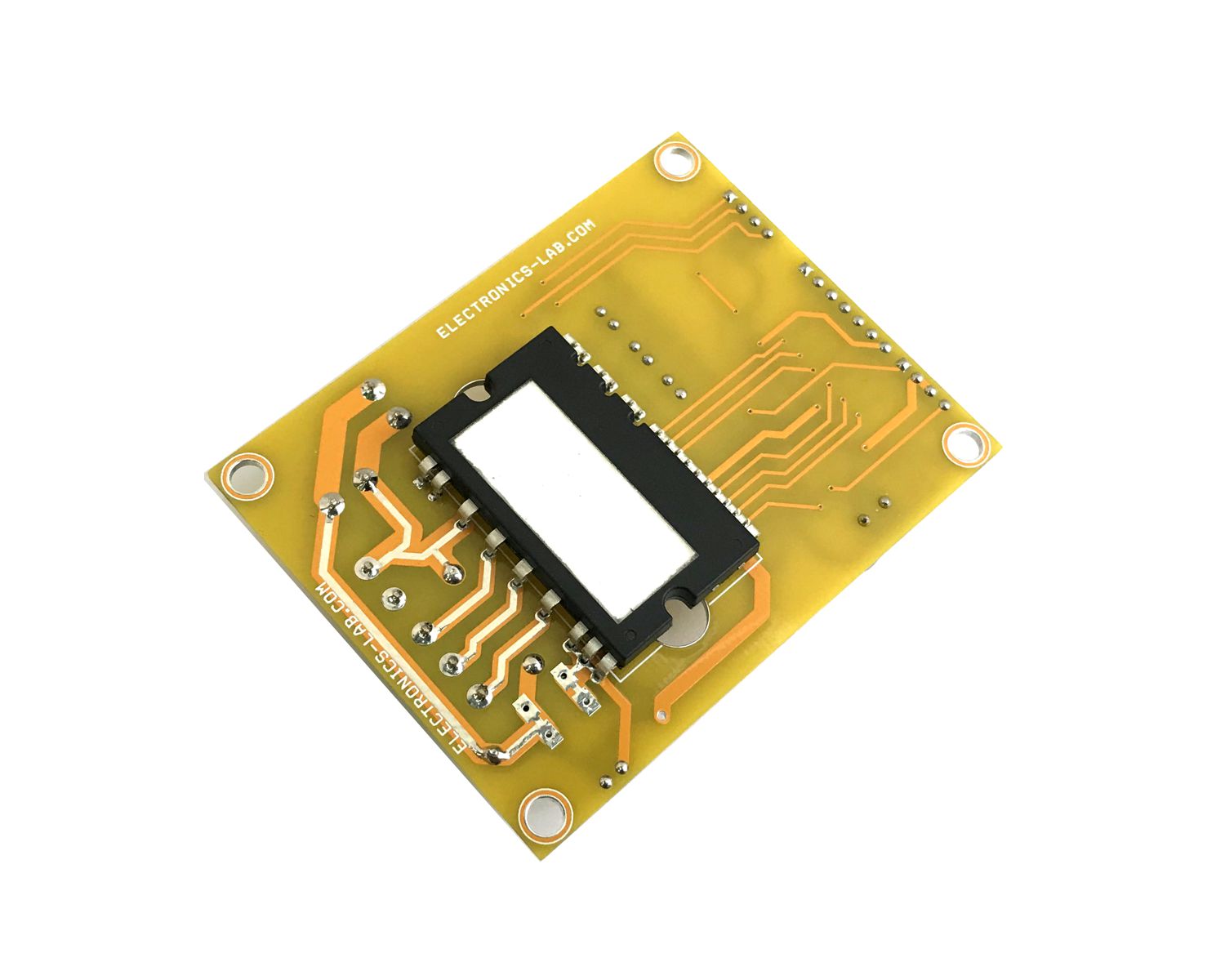
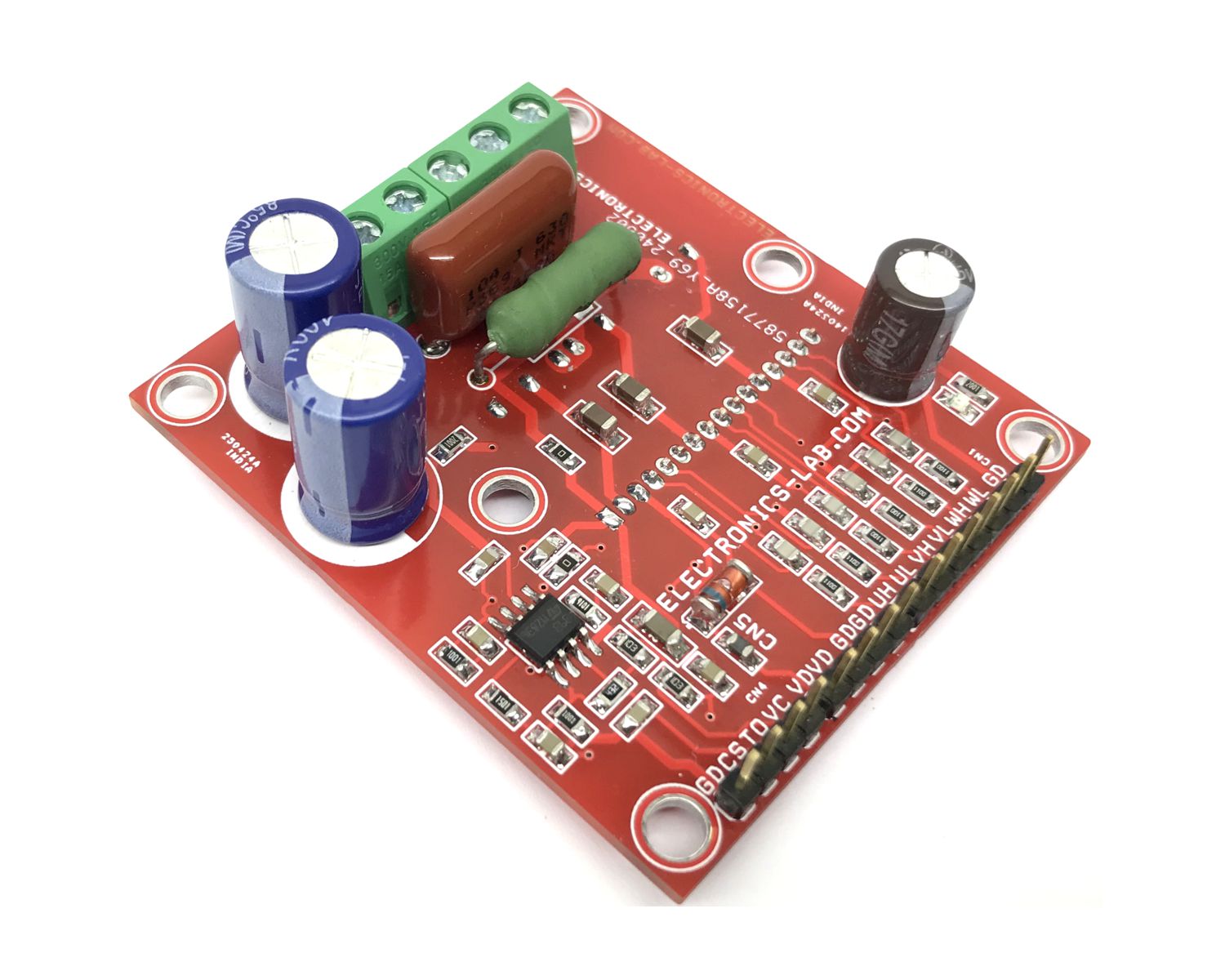
This is an advanced Motion module providing a fully featured, high-performance inverter output stage for AC induction, BLDC and PMSM motors such as refrigerators, fans, and pumps. This module is based on NFA50460 chip which integrates the optimized gate drive of the built−in IGBTs (FS4 RC IGBT technology) to minimize EMI and losses, while also providing multiple on−module protection features including under−voltage lockouts and thermal monitoring. The built−in high-speed Driver IC requires only a single supply voltage and translates the incoming logic−level gate inputs to the high voltage, high current drive signals required to properly drive the module’s internal IGBTs. Separate open emitter IGBT terminals are available for each phase to support the widest variety of control algorithms. Heatsink is a must for the IC before conducting any test.
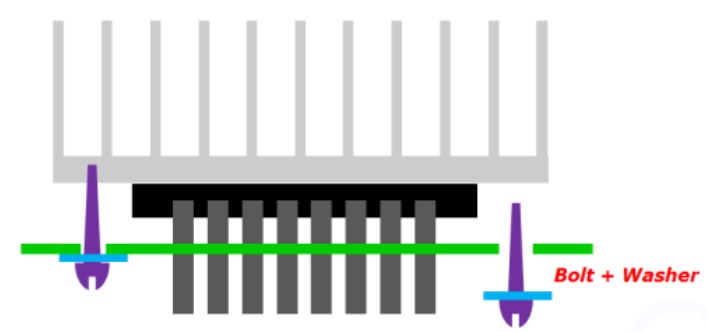
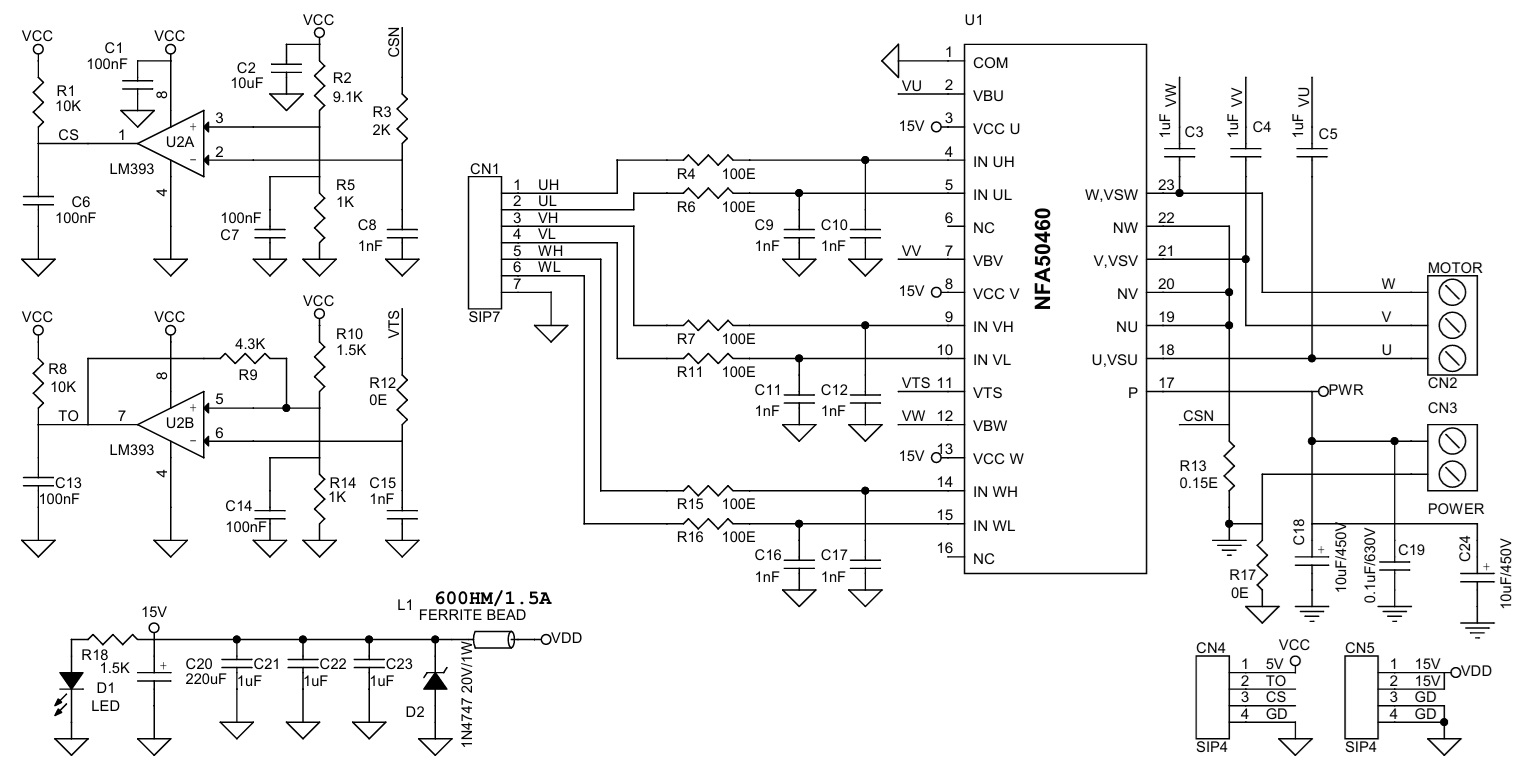
The project is built using NFA50460R4B IPM chip. This compact and reliable inverter project is ideal for small power motors such as fans and pumps. H-bridge configuration can also be created for low current high-voltage brushed DC motors. The Inverter project supports loads up to 4A. DC power supply voltage is up to 400VDC. The project operates with 6 PWM signals. Parameters for bootstrap circuit elements are dependent on PWM algorithm. For 15 kHz of switching frequency Bootstrap capacitors C3, C4, and C5 values is 1uF. Resistor R4, R6, R7, R11, R15, R16 and capacitor C9, C10, C11, C12, C16, C17 prevent improper signal due to surge-noise. The logic supply is protected with a 20V Zener diode, which prevents surge destruction under severe conditions. Comparator U2A provides low output when an over condition occurs, it measures the current across shunt resistor R13, and normally output is high. Comparator U2B is provided for over temperature, the output of U2B is high when IPM temperature is below 80 degrees C and goes low when the temperature reaches the threshold. A heatsink is a must for full load current, 2 mounting holes are provided throughout the PCB to mount the heatsink as shown in Figure below. Silicone thermal compound, also called thermal grease, should be applied between the heat sink and the flat surface of the IPM to fill microscopic air gaps due to imperfect flatness that ultimately reduces the contact thermal resistance. The IPM module should be soldered first. Excessive torque may bend the PCB.
Note 1: The project operates with lethal voltage and the user must take care of safety and all necessary precautions before testing the project.
Note 2: The board has dual option current sense resistor R13. The resistor must be 1% THT or SMD size 2512.
Features
Load Power Supply Up to 400V DC (Maximum 450V DC)
Load Current Continues 4A
Logic Supply 15V DC, Current 100mA
Power Supply for Over Current/Temperature Circuit (Comparator U2) 5V DC
One Board Power LED for Logic Supply
Shunt and Comparator Based Over Current Output
Over temperature threshold is 80 degrees centigrade.
HVIC for gate driving and under-voltage protection
Active-High interface, can work with 3.3V/5V logic (PWM Signals)
On Threshold Voltage 2.9V, Off Threshold Voltage 0.8V
Optimized for low electromagnetic interference
Isolation voltage rating of 1500Vrms for 1min
4 x 4 mm Mounting Holes
PCB Dimensions 60.64 x 54.29 mm
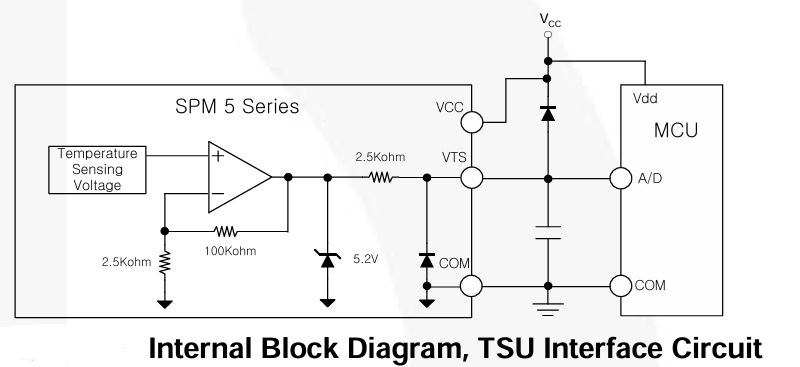
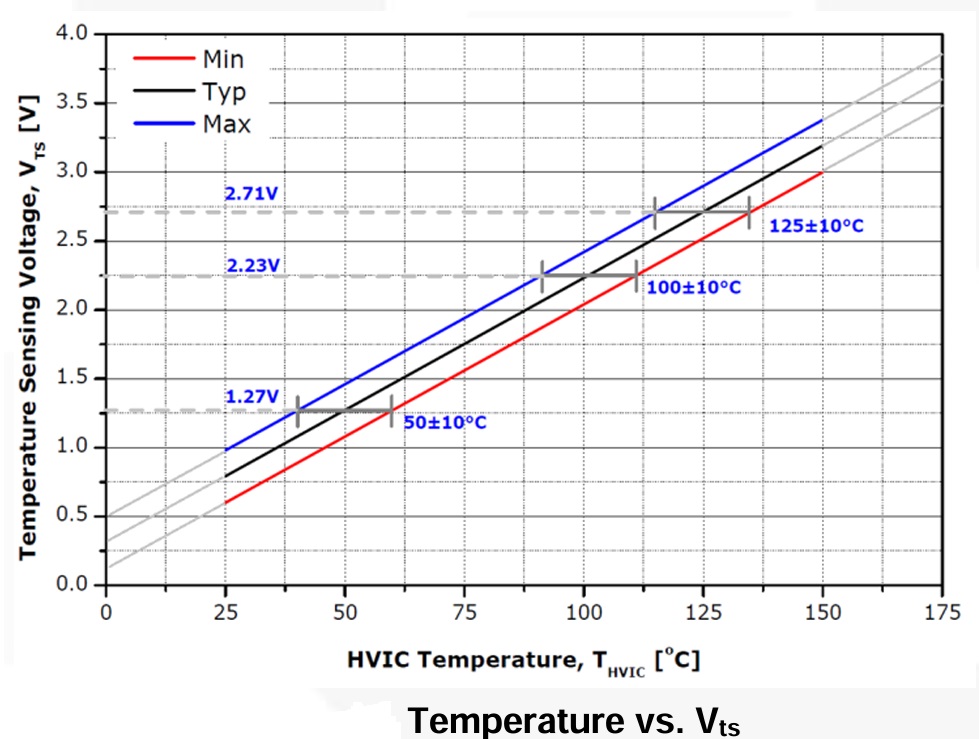
Temperature Sensing Output (VTS) – CN4 Pin 2-TO
Pin: VTS This indicates the temperature of the V-phase HVIC with analog voltage. HVIC itself creates some power loss, but mainly heat generated from the MOSFETs increases the temperature of the HVIC. Comparator U2B is used for over temperature. Output is high in normal condition when temperature is below 80 degrees, goes low when over temperature condition occurs. Over temperature threshold is 80 degrees centigrade.
Current Sense
Current sense resistor R13, Comparator U2A provided to sense the current, this circuit activates when over current condition occurs, output of U2A is normally high, goes low when over condition occurs. Threshold of over current can be alter using divider resistor R2 and R5.
These pins are activated by voltage input signals. The terminals are internally connected to the Schmitt trigger circuit.
The signal logic of these pins is active HIGH; the MOSFET turns ON when sufficient logic voltage is applied to the associated input pin.
The wiring of each input needs to be short to protect the module against noise influences.
An RC filter is used to mitigate signal oscillations or any noise that traces of input signals may pick up.
NFA50460R4B is an advanced Motion SPM 5 Series based on FS4 RC−IGBT technology as a compact inverter solution for small power motor drive applications such as fans and pumps. Embedded six FS4 RC−IGBTs, three half−bridge gate drive HVICs with temperature sensing, and three bootstrap diodes in a compact package fully isolated and optimized for thermal performance. Major features are low Electro−magnetic Interference (EMI) characteristics through optimizing switching speed and reducing parasitic inductance. Since IGBTs are employed as power switches, it provides much more ruggedness and larger Safe Operating Area (SOA) than IGBT based power modules. Right solution for compact and reliable inverter designs where the assembly space is constrained.
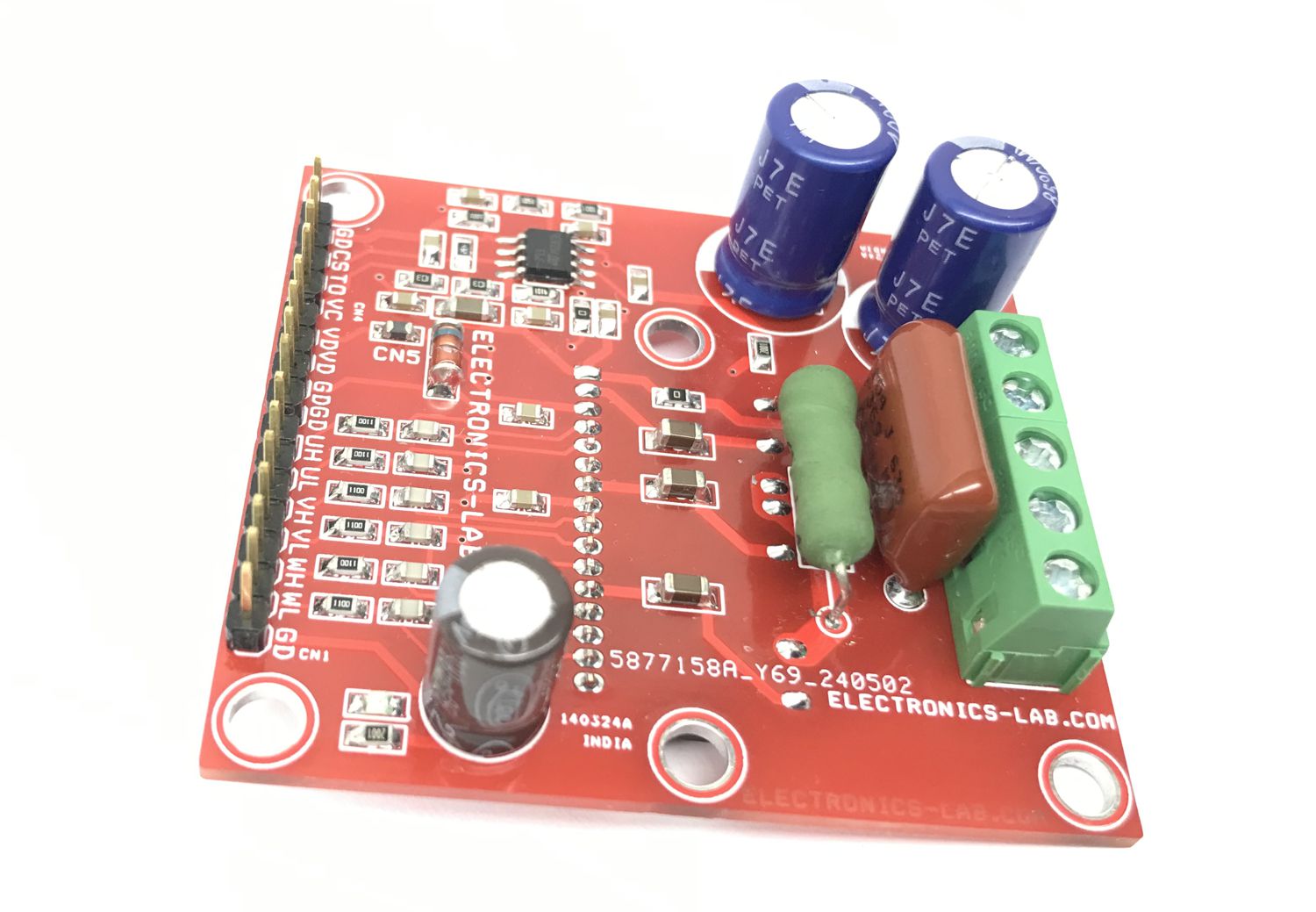
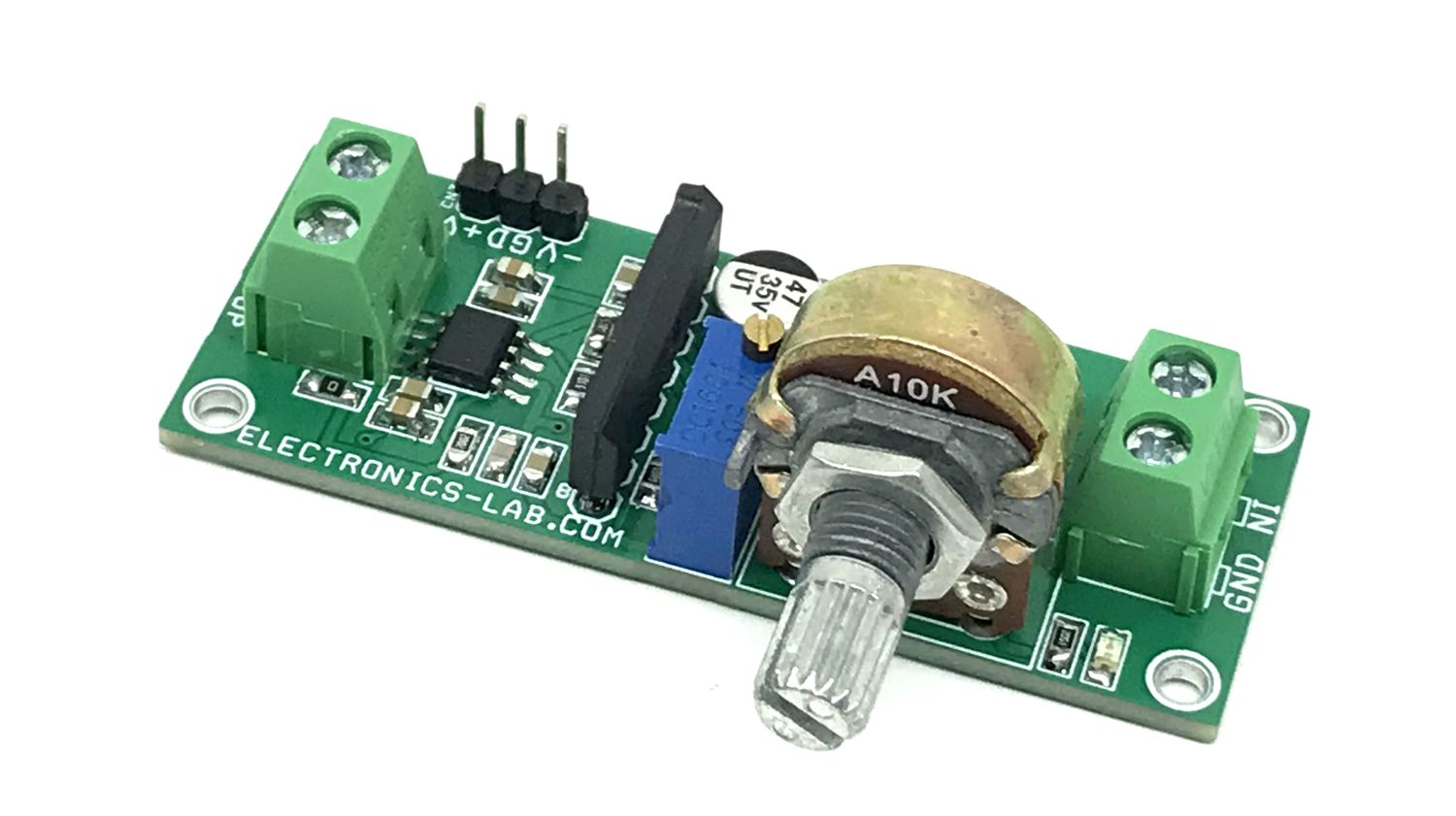
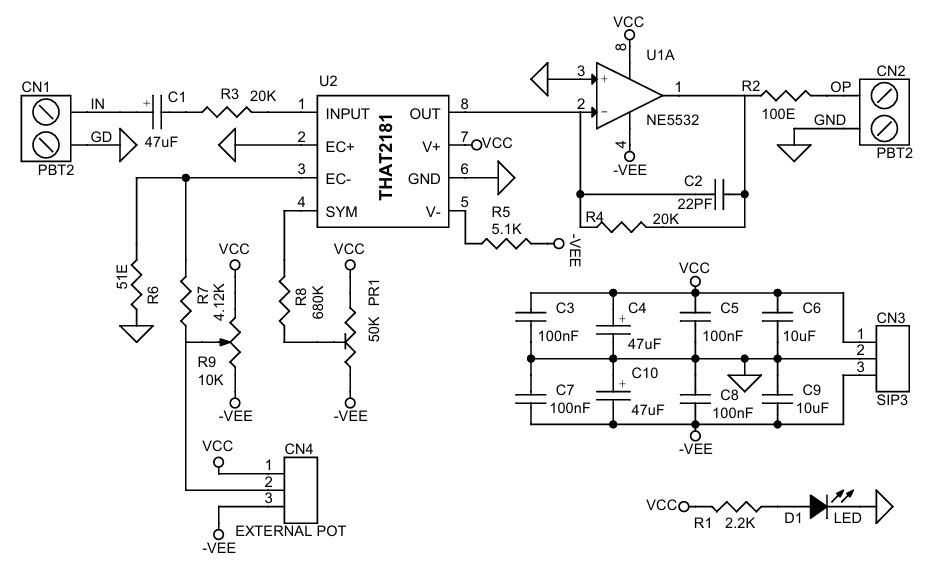
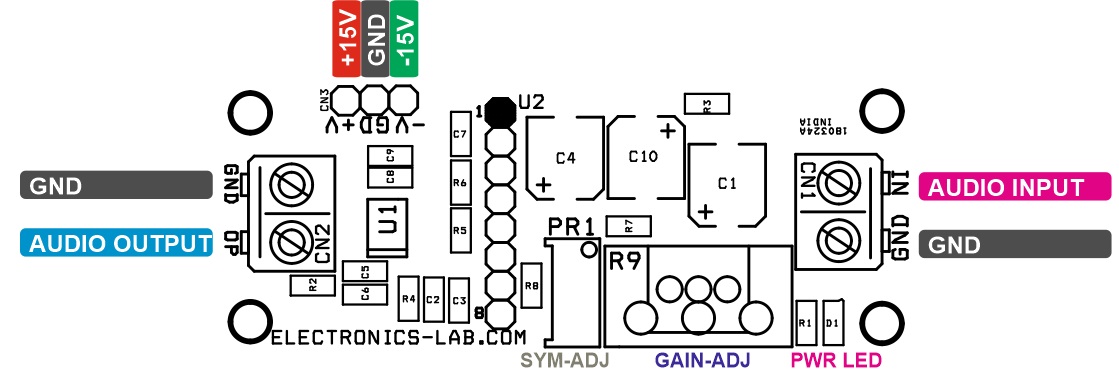
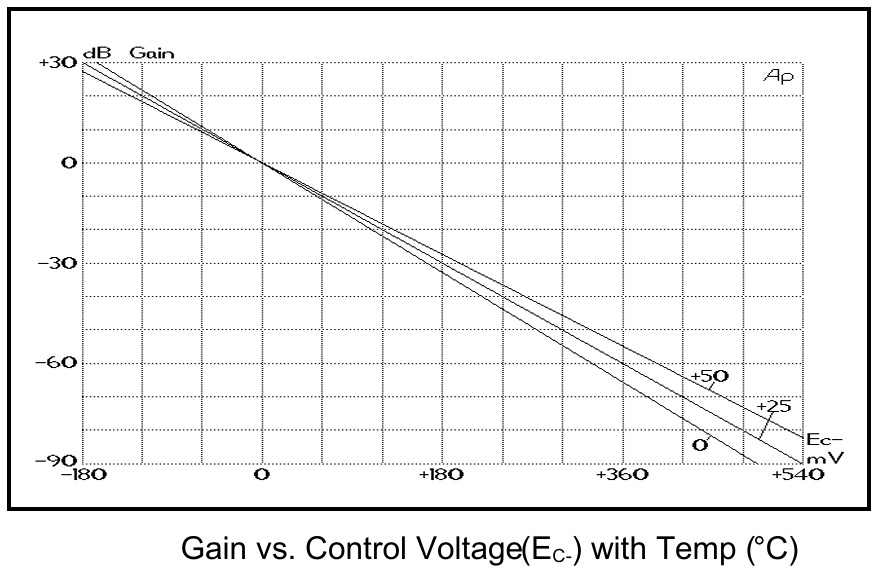
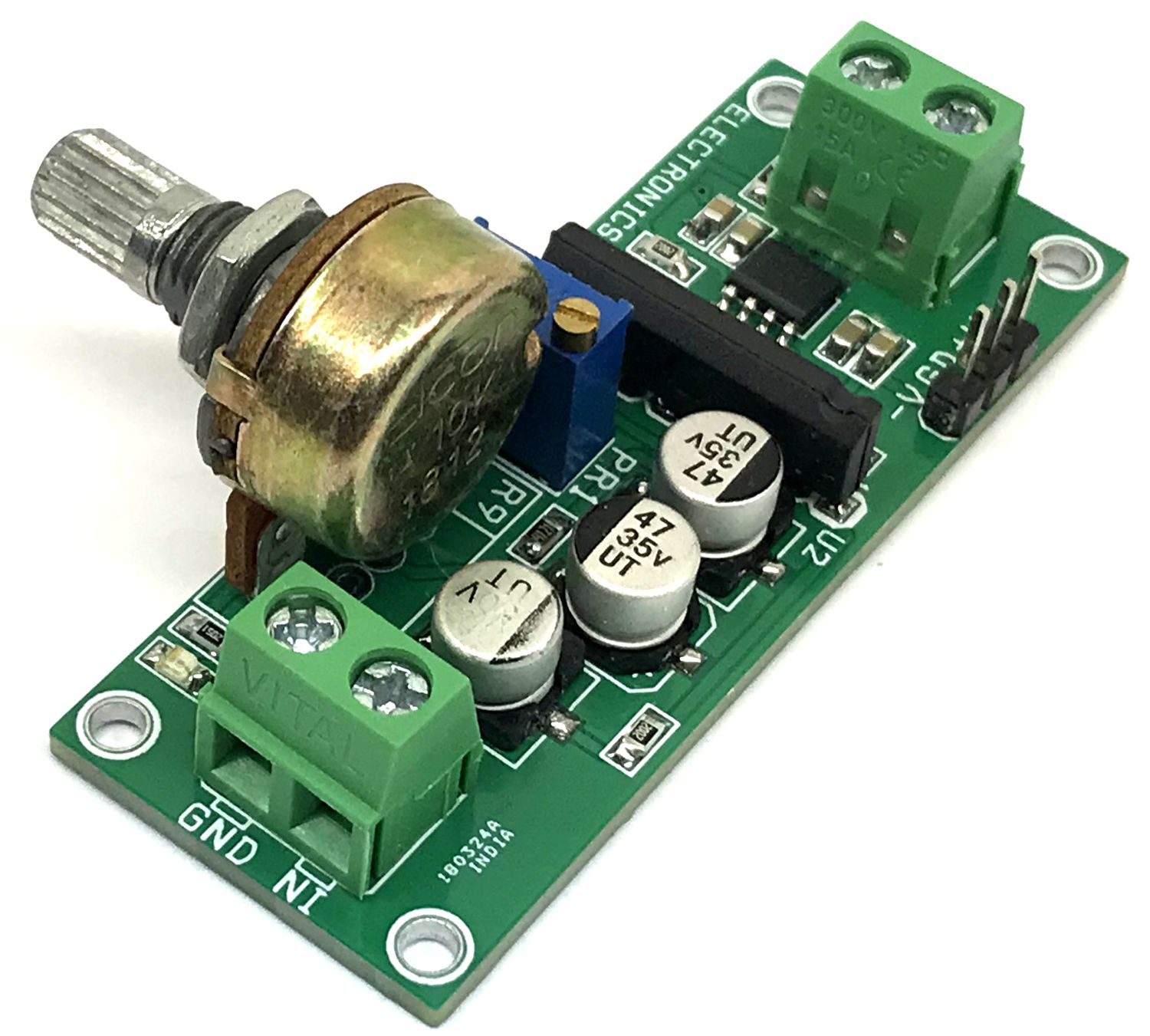
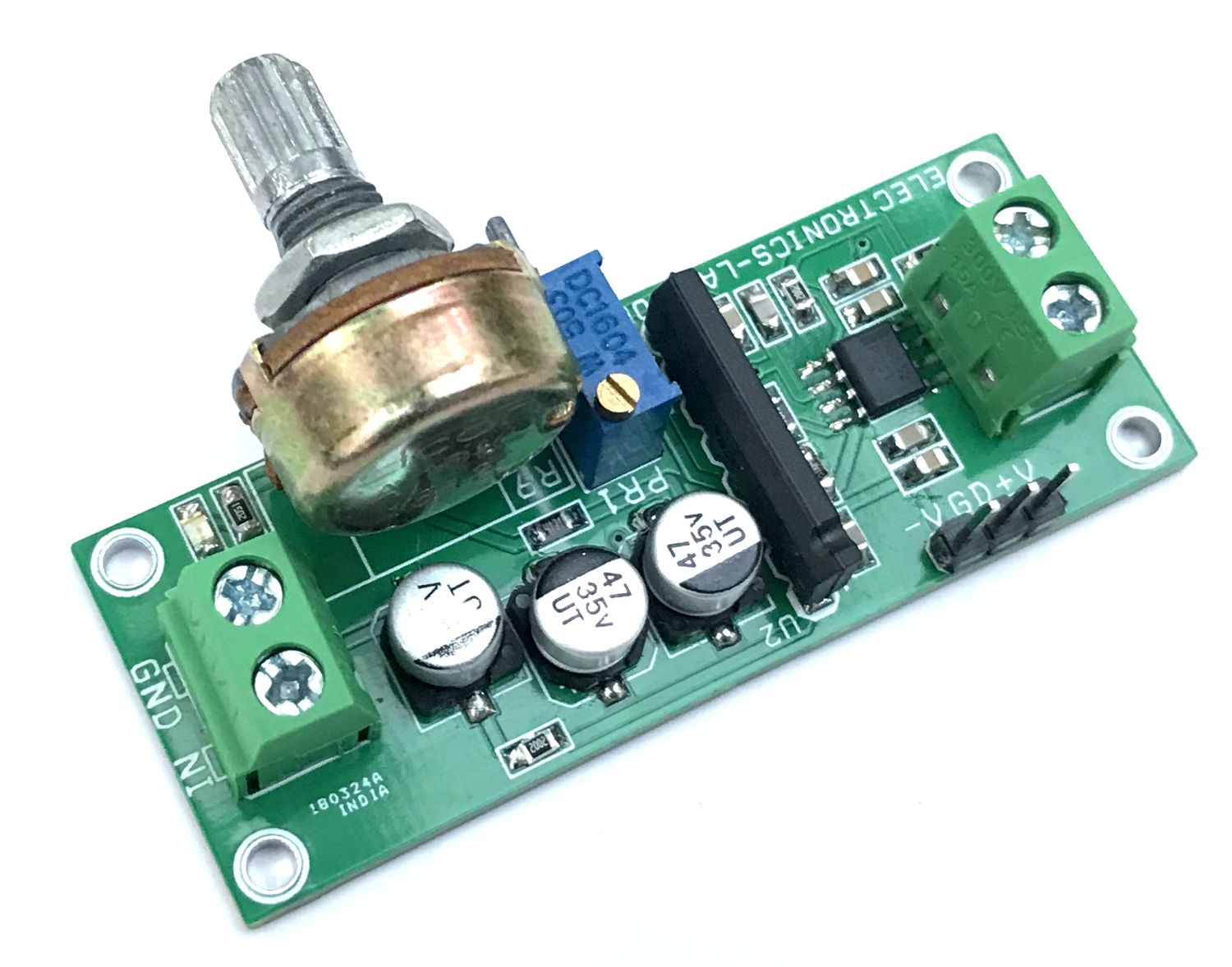
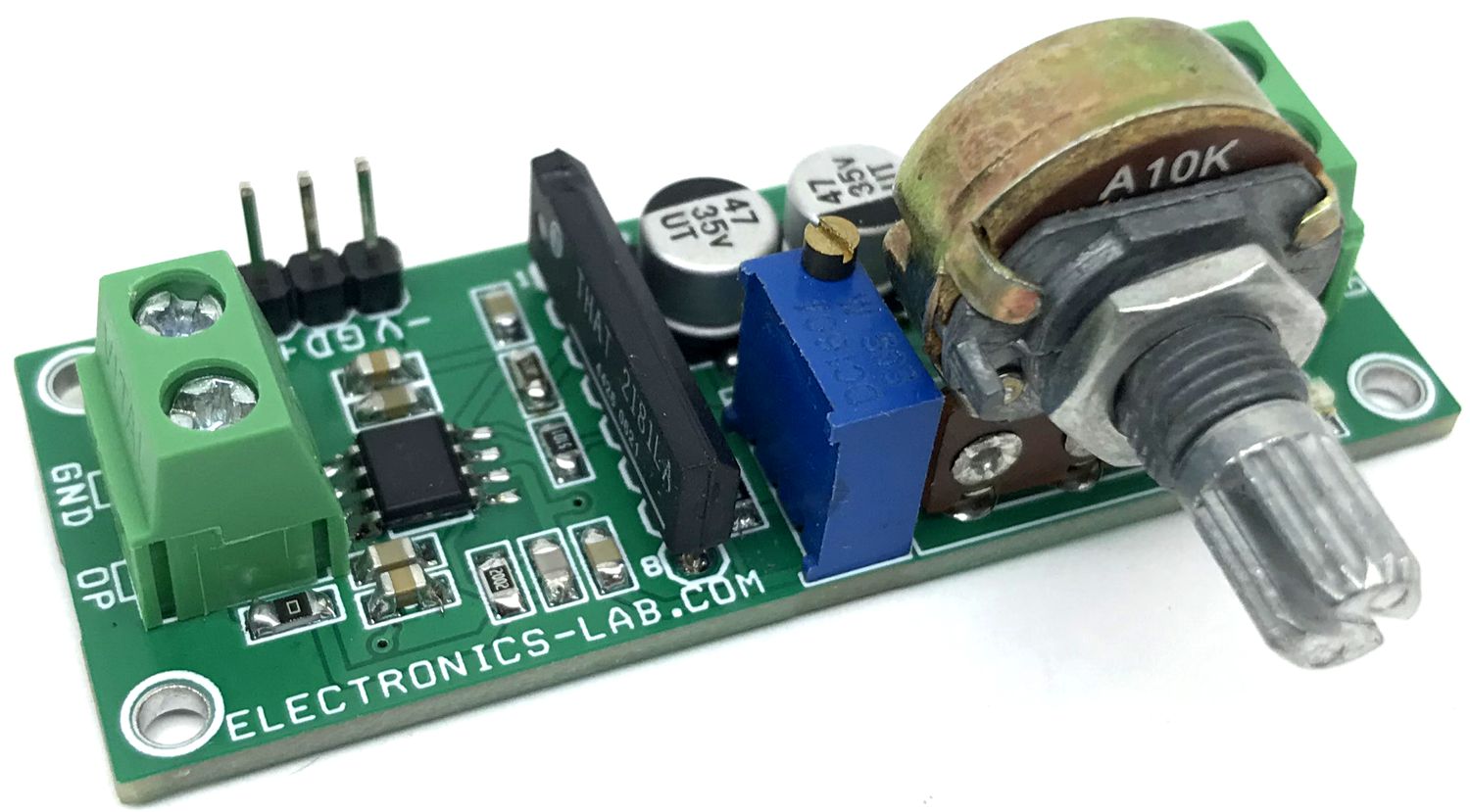
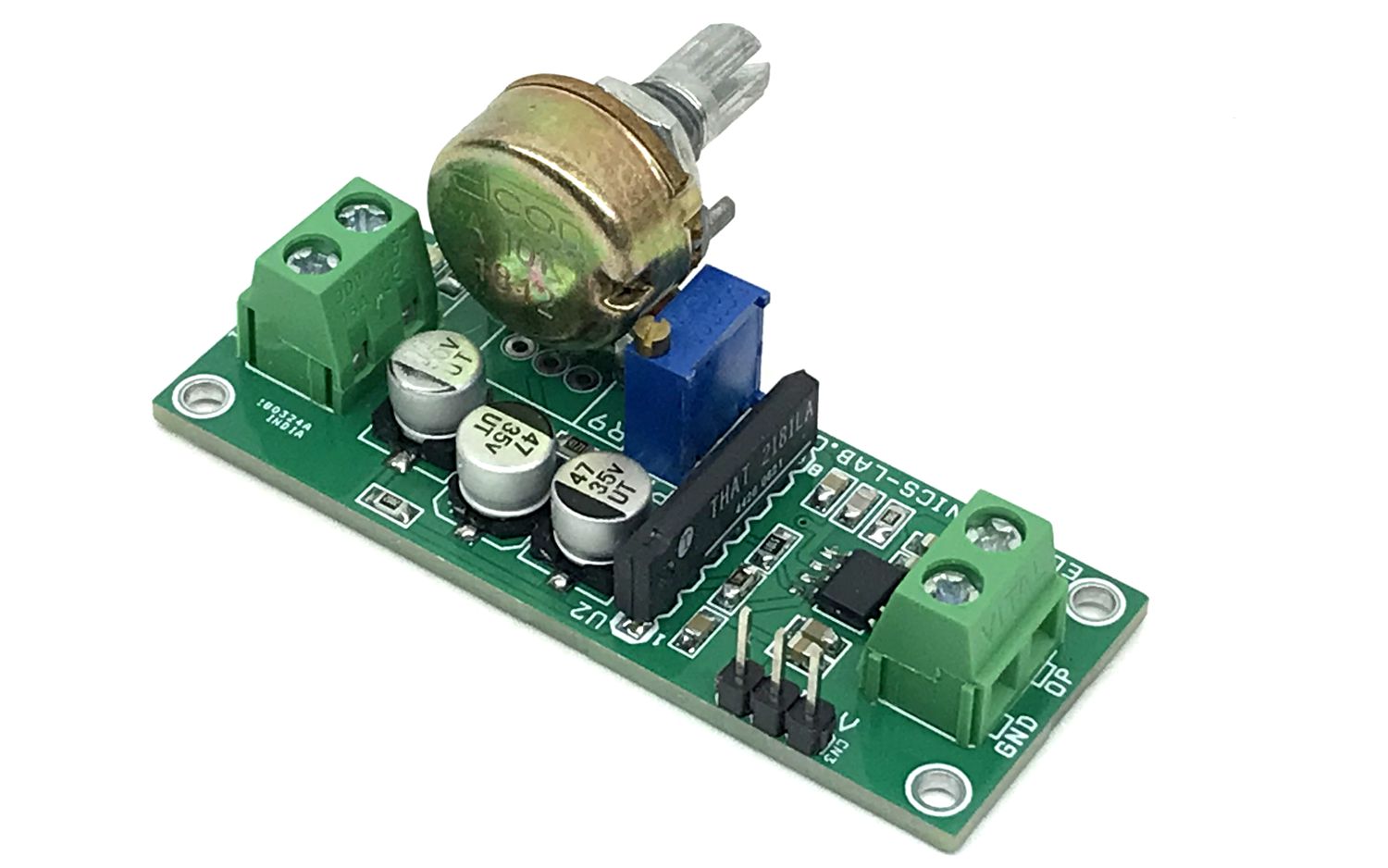
The project presented here is a Voltage Controlled Amplifier (VCA). A VCA board helps users control the Audio Level from a remote potentiometer. It requires a single-ended audio signal in the input. Gain control voltage can be adjusted through an on-board potentiometer or use an external potentiometer connected to CN4. The project works with a dual ±15V power supply. Screw terminal connectors are provided for signal input and signal output. The project is built using THAT2181LA chip, a VCA that is designed for high-performance audio-frequency applications requiring exponential gain control, low distortion, wide dynamic range, and low control-voltage feedthrough. These parts control gain by converting an input current signal to a bipolar logged voltage, adding a DC control voltage, and re-converting the summed voltage back to a current through a bipolar antilog circuit. Stereo control of VCA with a single potentiometer is possible.
THAT 2181-series trimmable Blackmer voltage-controlled amplifier (VCAs) ICs are very high-performance current-in/current-out devices with two opposing-polarity, voltage-sensitive control ports. They offer wide-range exponential control of gain and attenuation with low signal distortion.
Trimming
The trim should be adjusted for minimum harmonic distortion using PR1. This is usually done by applying a middle-level, middle-frequency signal (e.g. 1 kHz at 1 V) to the audio input, setting the VCA to 0 dB gain, and adjusting the SYM trim while observing THD at the output. In THAT2181LA, this adjustment coincides closely with the setting which produces minimum control-voltage feedthrough, though the two settings are not always identical.
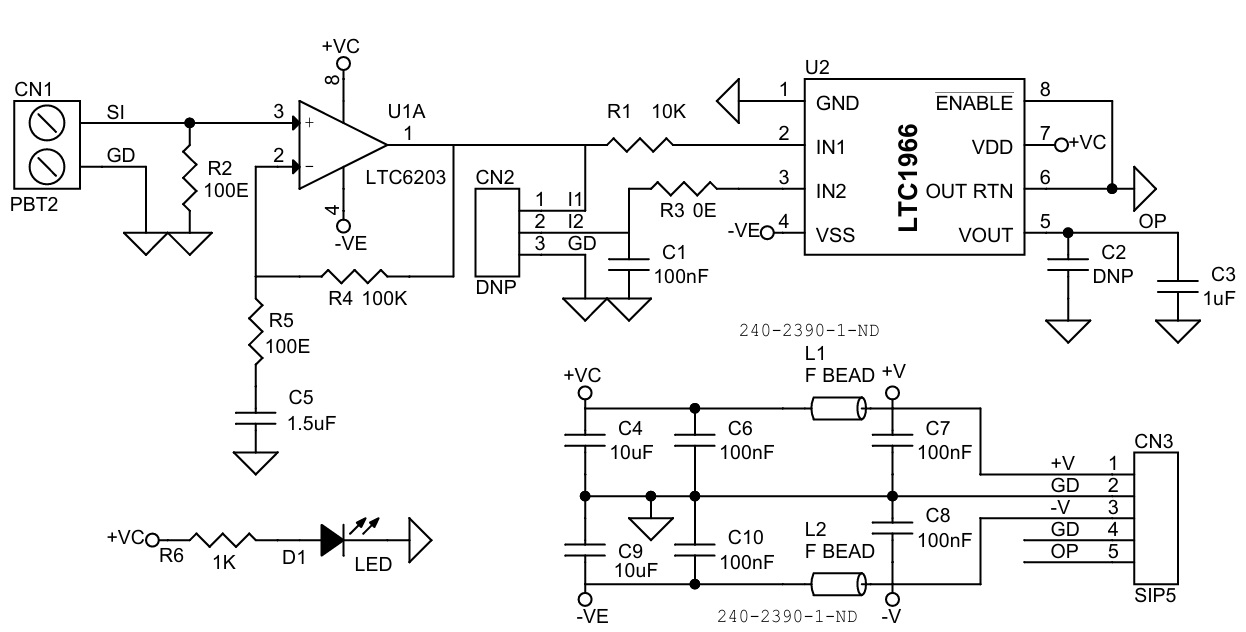
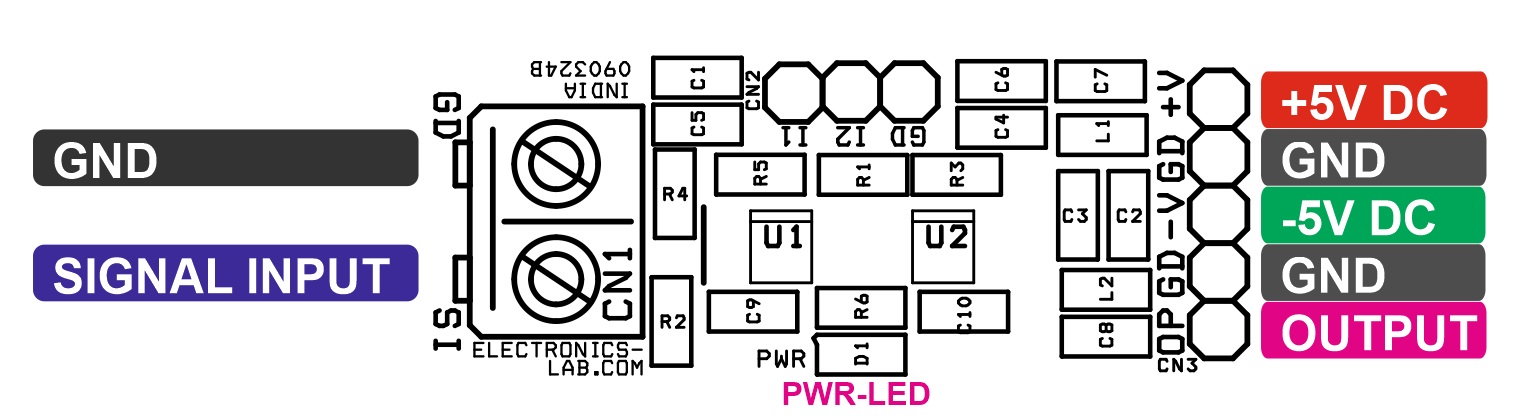
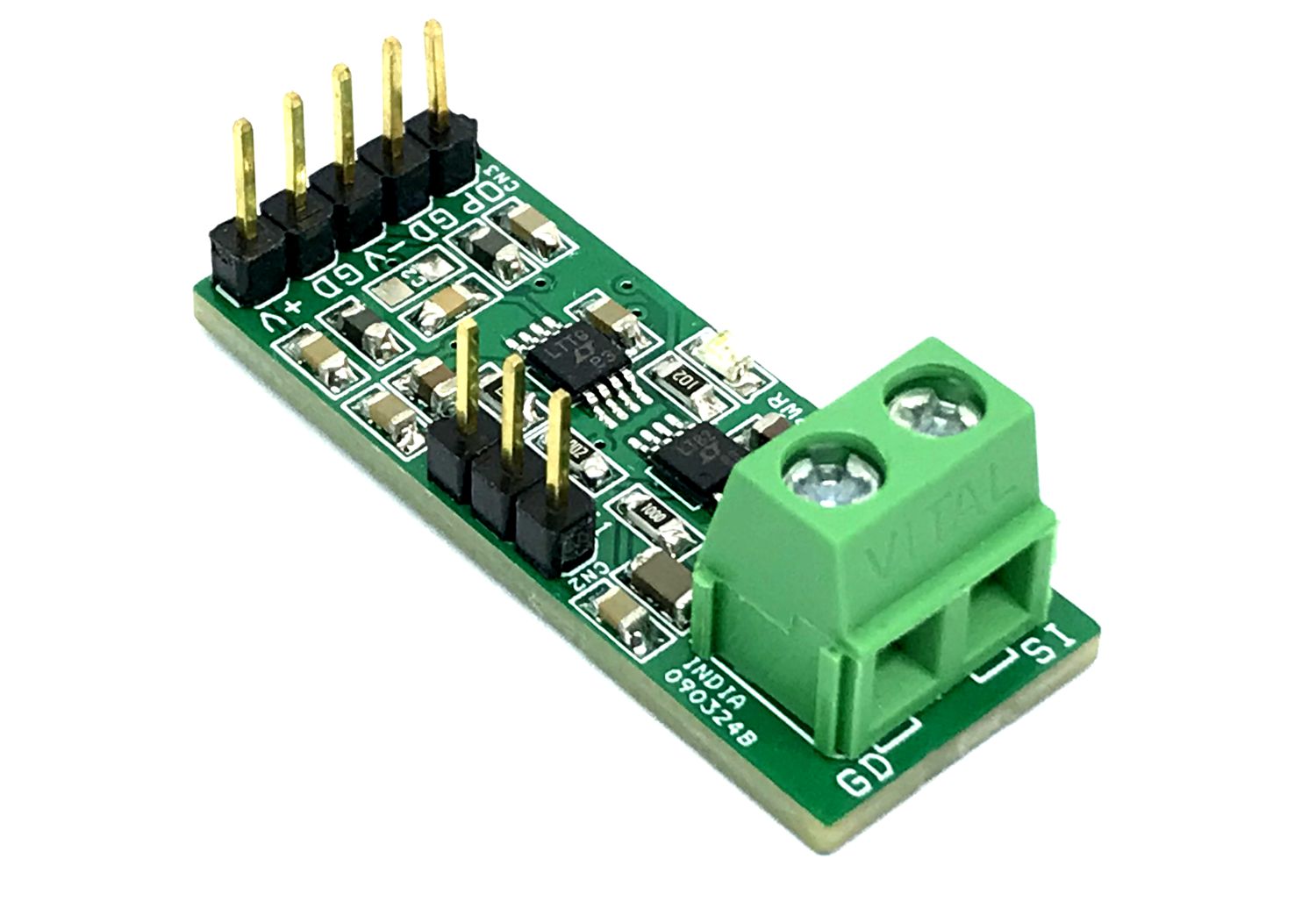
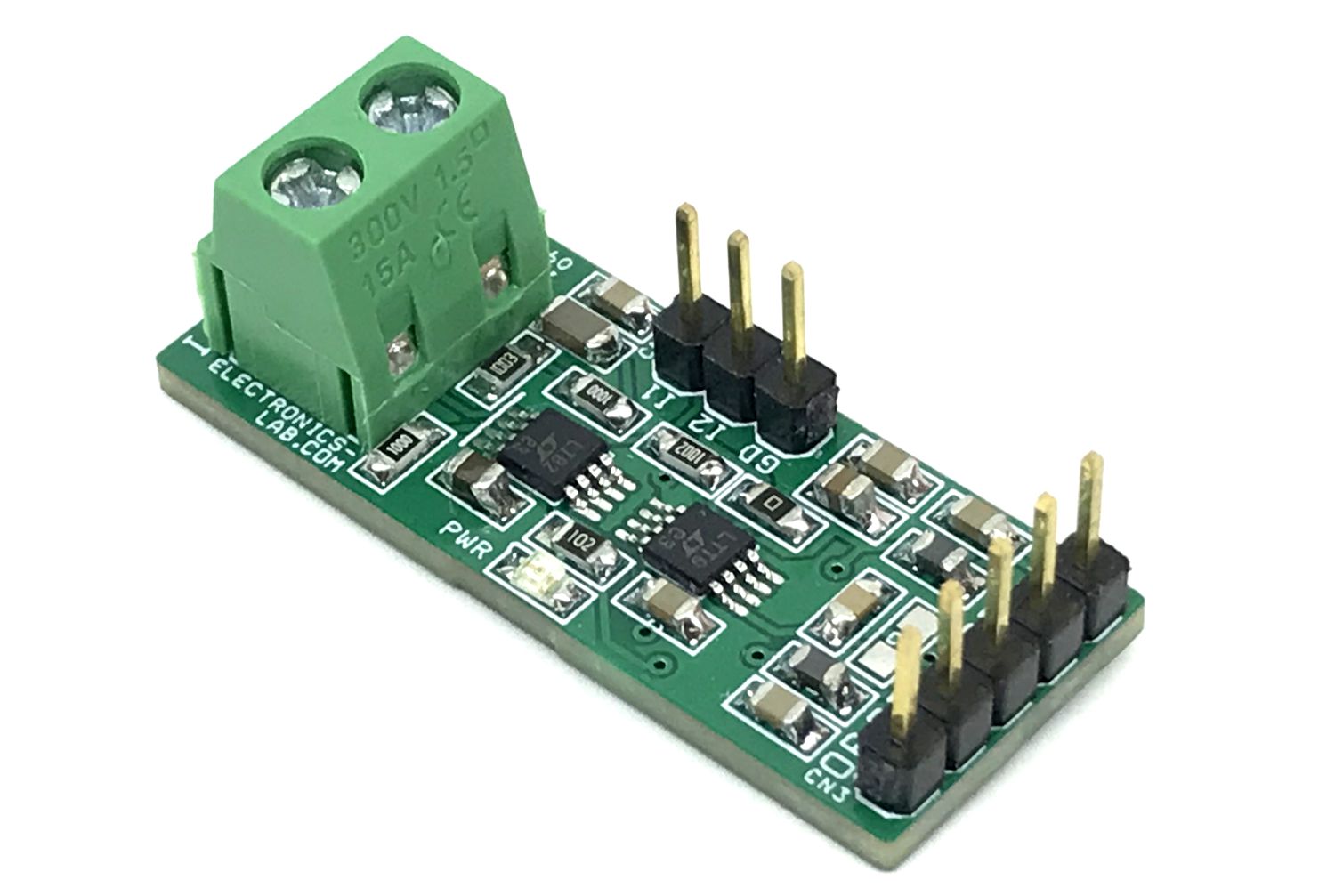
This mini-module helps users to measure the RMS noise of AC signal. Apply the AC noise signal to the input and the circuit outputs a DC voltage. Signal bandwidth is 1Khz to 100Khz and input sensitivity is 1 μVolt RMS. The LT6203 ultra-low noise, low power op-amp amplifies the low-level signal. Further, this signal is converted into a DC voltage by LTC1966 True RMS converter chip from Analog Devices. The circuit works with dual supply +/-5V DC and consumes very low current.
VOutput = 1mVDC/1μVolt RMS Noise
Credits: Schematic is from Analog Devices Application note.