Filtering Noisy Arduino Measurements
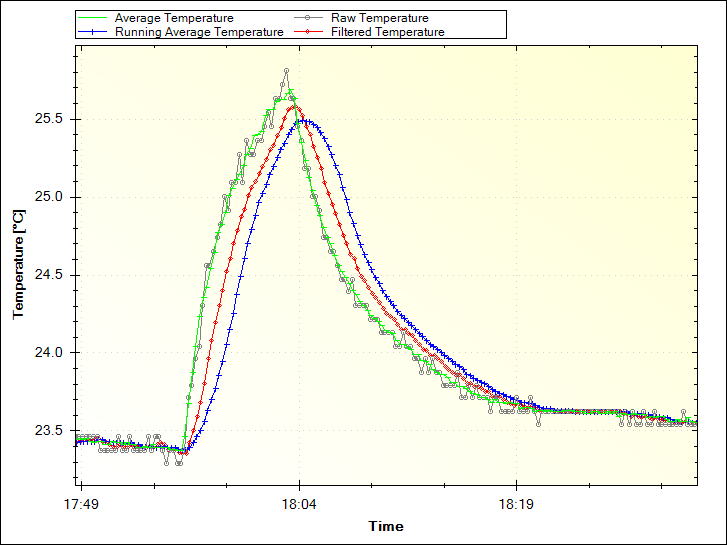
Paul Martinsen @ megunolink.com discuss about noise in analog input of arduino and how to filter it. He examines 3 filtering algorithms: Averaging, Running average, Exponential filter and provides the code to achieve that.
Measurements from the real world often contain noise. Loosely speaking, noise is just the part of the signal you didn’t want. Maybe it comes from electrical noise: the random variations you see when calling
analogReadon a sensor that should be stable. Noise also arises from real effects on the sensor. Vibration from the engine adds noise if you’re measuring the acceleration of a go-kart, for example. Filtering is a method to remove some of the unwanted signal to leave a smoother result.
Filtering Noisy Arduino Measurements – [Link]


