Dual Forward/Reverse DC Motor Driver with Brake for Robots
This high current forward-reverse DC motor driver is built using STK681-332 IC from ON Semiconductor. The circuit can drive brushed DC Motor with up to 12 A peak current.
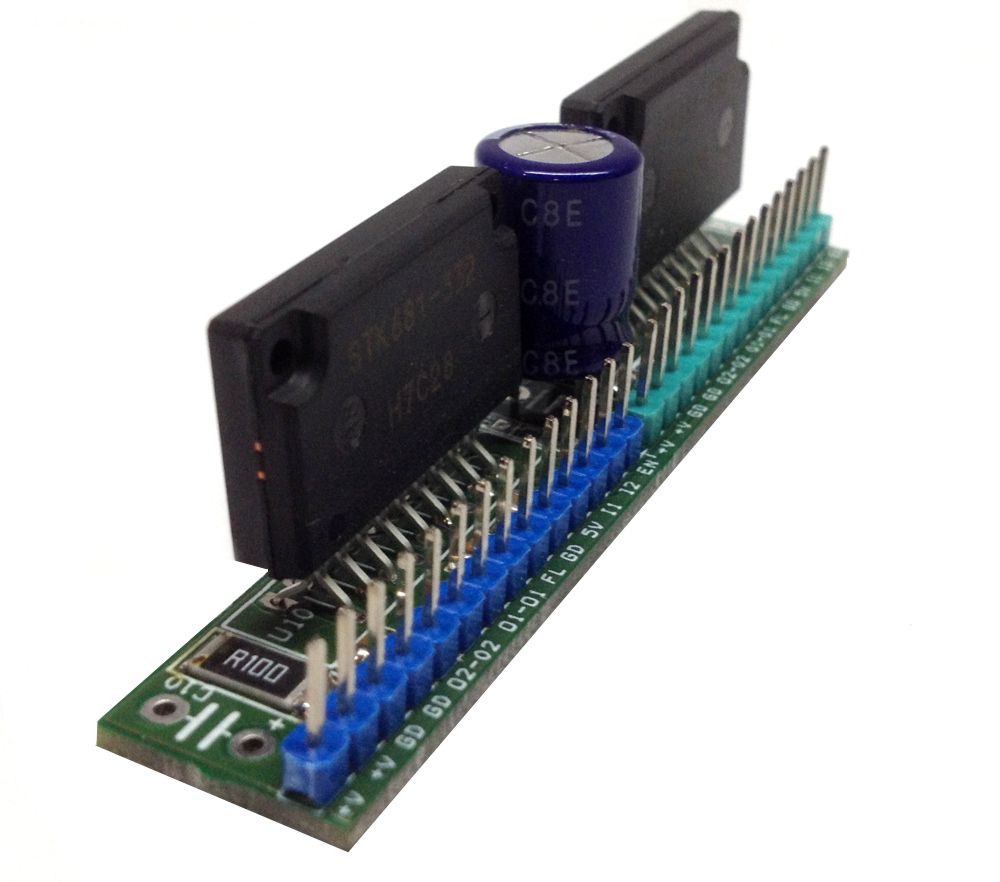
This high current forward-reverse DC motor driver is built using STK681-332 IC from ON Semiconductor. The circuit can drive brushed DC Motor with up to 12 A peak current. The circuit requires 3 input signals: Enable for PWM input for speed control, IN1 and IN2 to change the motor direction and to apply the brake while the motor is in running condition. Monitor (Fault) pin is used when either of the outputs short-circuits detector, overcurrent detector, or overheat detector is activated. When the detector is activated, this pin is set low and all outputs are latched off. If the output pin is short-circuited directly to VCC or connected directly to GND, an output short circuit condition is detected and the output is latched in the off state. To restart the operation, turn on 5V supply again. The maximum input frequency is 50 kHz. Both ICs required a large size heat sink to dissipate heat.
Dual Forward/Reverse DC Motor Driver with Brake for Robots – [Link]


