20 Non-Contact Infrared Reflective Sensor for Line Follower Robots
This project consists of 20 non-contact infrared reflective sensors and each sensor provides an analog output. QRD114 sensor is the heart of the project which includes Infrared LED and photosensor.
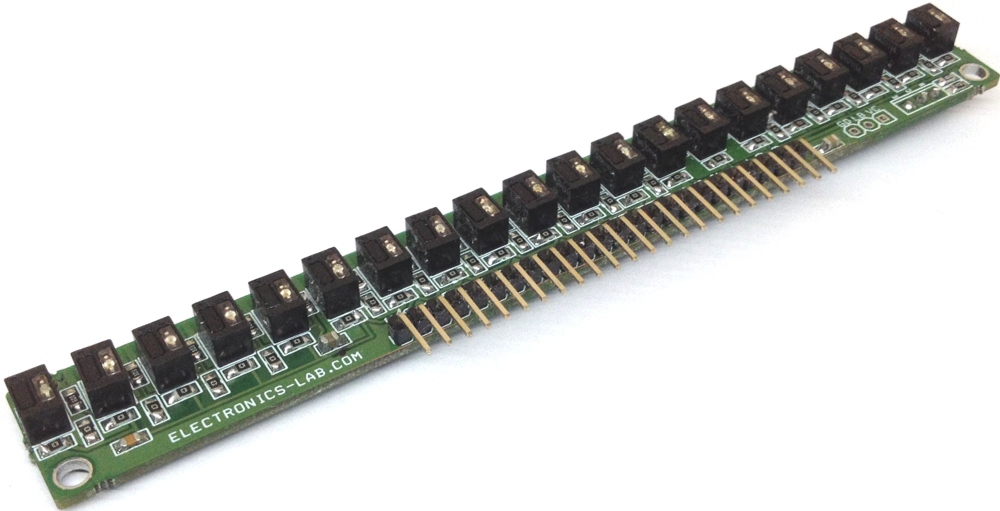
This project consists of 20 non-contact infrared reflective sensors and each sensor provides an analog output. QRD114 sensor is the heart of the project which includes Infrared LED and photosensor. The output of each sensor is high and goes low as objects or lines detected. The analog output voltage is proportional to IR reflected back to the sensor. The project has been designed to be used in robotics applications for line follower or multi-object sensor. Sensor requires 5V DC to work, all LEDs have current limiting resistors, each output has a pull resistor, and the normal output of each sensor is high due to the pull-up resistor and goes low as object or line is detected. IR LEDs power ON/OFF can be controlled using Q1 BD140 PNP BJT transistor which requires a low voltage for normal operation or all IR LED and can be powered up to 5V DC with help of VL input pin. Two 3mm mountings provided for easy mounting on robot chassis. By reflected infrared light, it can detect transitions from light to dark or any objected comes across the sensor.
20 Non-Contact Infrared Reflective Sensor for Line Follower Robots – [Link]


